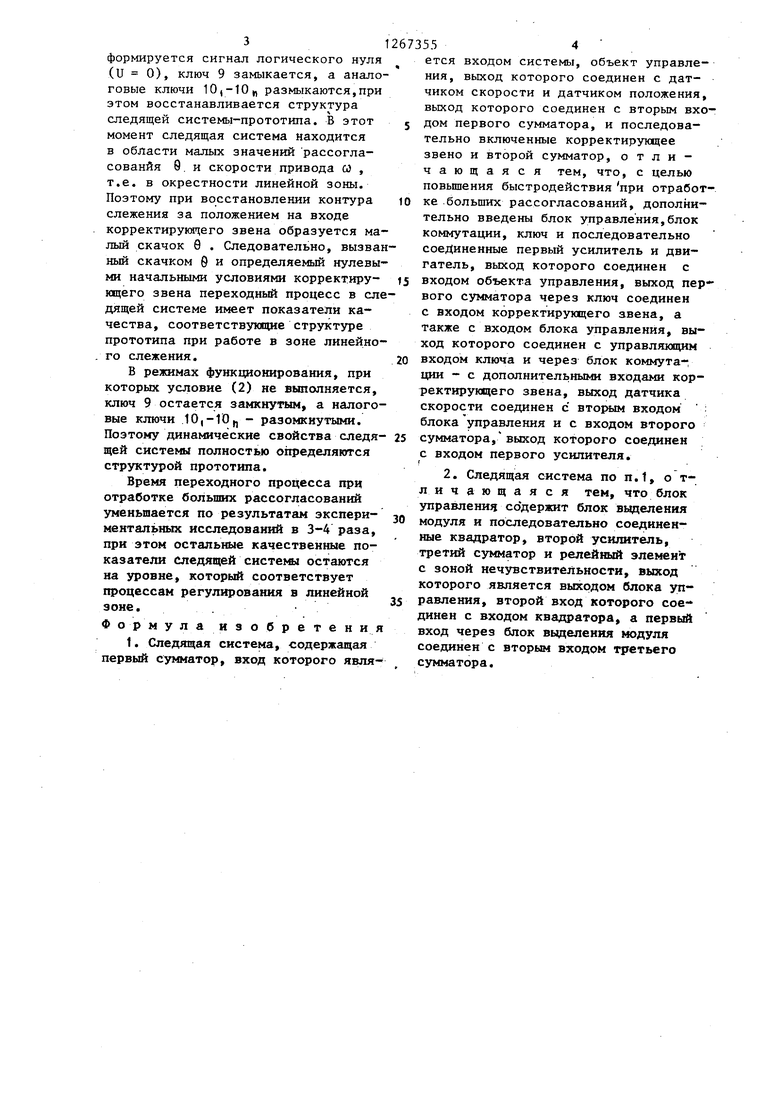
Изобретение относится к системам автоматического регулирования и может быть использовано з классе систем автоматического управления, в которых наряду с режимом слежения одним из основных режимов работы является также режим программной установки на заданную координату, или режим ввода в зону слежения. Целью изобретения является повышение качества управления, в частности быстродействия при обработке больших рассогласований. На фиг. 1 представлена блок-схем следящей сиетеьа:; на фиг. 2 - пример пра1 тическЬй реализации корректирую щего звена и блока коммутации. Следящая система содержит первый сумматор 1, корректирующее звено 2, второй сумматор 3, первый усилитель 4, двигатель 5, объект 6 управления датчик 7 положения, датчик 8 скорос ти, ключ 9, блок 10 коммутации, сос тоящий из п аналоговых ключей 10,.10(,, блок 11 управления, блок 12 вы деления модуля, третий сумматор 13, квадратор 14, второй усилитель 15, релейный элемент 16 с зоной нечувст вительности. Корректирующее звено 2 (фиг.2) .содержит конденсаторы 17 и 18 и резисторы 19 и 20. Блок 10 коммутации содержит аналоговые ключи 10., и 10. Обозначим & - сигнал ошибки сле дящей системы на выходе первого 1 сумматора. На выходе блока 11 управления фо мируется логический сигнал о, при /е/+ 5 1, при /б/+ i где /б/ - модуль сигнала ошибки сле дящей системы; скорость объекта| коэффициент передачи второго 15 усилителя; Б о зона нечувствительности релейного элемента 16, Величина 8 устанавливается малой но достаточной для надежного выполнения логического условия (1) в рав новесном состоянии следящей системы Требуемая величина коэффициента передачи k устанавливается экспериментально при регулировке следящей 552 системы. Приближенное его значение может быть определено с помощью выражений:I /8,/ .... 1г -.. ыТ момент инерции объекта; максимально развиваемый двигателем тормозной момент;максимальная скорость объекта;0,. - путь торможения объекта от скорости и ) 0. Оценки входящих в формулу (3) аргументов I, М, 9 , (О„ могут быть как расчетными, так и полученными из экспериментов. .Следящая система работает следующим образом. В момент включения независимо от величин начального рассогласования б , в частности при , образуется сигнал логического нуля (U 0), так как за счет сигнала смещения 5 О всегда вьтолняется vcлoвиe (1) /9/ - ko+S Таким образом, при включении ключ 9 всегда замкнут, а аналоговые ключи 10;, разомкнуты. При появлении сигнала 0 , отличного от нуля, начинается разгон и движение системы к согласованному , положению; уменьшается значение /9/ и увеличивается значение ko. В момент, когда вьтолняется условие (2) /9/ - k uU . формируется сигнал логической единицы (и 1). По этому сигналу ключ 9 отключает сигнал 9 от входа корректирующего звена 2, а аналоговые ключи 10,-10, включенные параллельно реактивным элементам - конденсаторам 17 и 18, быстро разряжают их. При этом одновремеино выставляются нулевые начальные условия корректирующего звена 2, и на входе второго сумматора 3 сигнал бц становится равным нулю; тахометрический контур отрицательной обратной связи создаг ет максимальный момент торможения объекта, что приводит к уменьшению значений как /0/, так и kw. В момент, когда выполняется условие (1), 3 формируется сигнал логического нуля (и 0), ключ 9 замыкается, а анало говые ключи 10,-10 и размыкаются,при этом восстанавливается структура следящей системы-прототипа. В этот момент следящая система находится в области малых значений рассогласования 9. и скорости привода а , т.е. в окрестности линейной зоны. Поэтому при восстановлении контура слежения за положением на входе корректирующего звена образуется ма лый скачок 9 . Следовательно, вызва ный скачком 0 и определяемый нулевы ми начальными условиями корректируетцего звена переходный процесс в ел дящей системе имеет показатели качества, соответствующие структуре прототипа при работе в зоне линейно го слежения. В режимах функционирования, при которых условие (2) не выполняется, ключ 9 остается замкнутым, а налого вые ключи 10,-IOf, - разомкнутыми. Поэтому динамические свойства следя щей системы полностью определяются структурой прототипа. Время переходного процесса при отработке больших рассогласований уменьшается по результатам экспериментальных исследований в 3-4 раза, при этом остальные качественные показатели следящей системы остаются на уровне, который соответствует процессам регулирования в линейной зоне. . Формула изобретени 1. Следящая система, содержащая первый сумматор, вход которого явля 554 ется входом системы, объект управления, выход которого соединен с датчиком скорости и датчиком положения, выход которого соединен с вторым входом первого сумматора, и последовательно включенные корректирующее звено и второй сумматор, отличающаяся тем, что, с целью повышения быстродействия при отработке больших рассогласований, дополнительно введены блок управления,блок коммутации, ключ и последовательно соединенные первый усилитель и двигатель, выход которого соединен с входом объекта управления, выход первого сумматора через ключ соединен с входом корректирующего звена, а также с входом блока управления, выход которого соединен с управляющим входом ключа и через блок коммутаг ции - с дополнительными входами корректирующего звена, выход датчика скорости соединен с BTOIMJM входом : блока управления и с входом второго сумматора, выход которого соединен с входом первого усилителя. 2. Следящая система по п.1, о тл и ч а ю щ а я с я тем, что блок управления содержит блок выделения модуля и последовательно соединенные квадратор, второй усилитель, третий сумматор и релейный элемент с зоной нечувствительности, выход которого является выходом блока управления, второй вход которого соединен с входом квадратора, а первый вход через блок вьщеления модуля соединен с вторым входом третьего сумматора.
f f t. HSri
(27гу;. /
-к2н
Т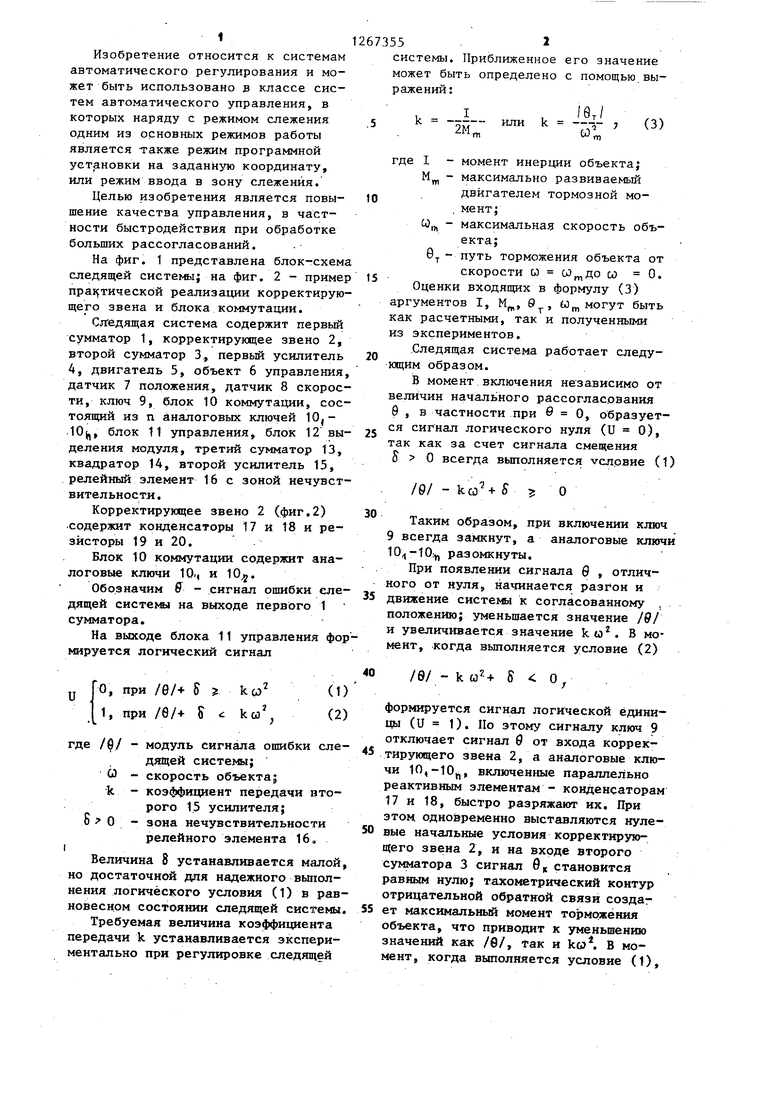
| название | год | авторы | номер документа |
|---|---|---|---|
| Следящая система | 1988 |
|
SU1529175A2 |
| Следящая система | 1990 |
|
SU1764030A1 |
| Следящая система | 1975 |
|
SU591816A1 |
| СПОСОБ АВТОМАТИЧЕСКОГО УПРАВЛЕНИЯ В СИСТЕМЕ С ЛЮФТОМ И СЛЕДЯЩАЯ СИСТЕМА ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 1999 |
|
RU2154295C1 |
| СПОСОБ АВТОМАТИЧЕСКОГО РЕГУЛИРОВАНИЯ И СИСТЕМА ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 1988 |
|
RU2012034C1 |
| Самонастраивающийся электропривод | 1986 |
|
SU1352454A1 |
| СПОСОБ АВТОМАТИЧЕСКОГО УПРАВЛЕНИЯ И СЛЕДЯЩАЯ СИСТЕМА ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2004 |
|
RU2296355C2 |
| Следящая система | 1989 |
|
SU1732329A1 |
| СПОСОБ АВТОМАТИЧЕСКОГО УПРАВЛЕНИЯ В СИСТЕМЕ С ЛЮФТОМ И СЛЕДЯЩАЯ СИСТЕМА ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 1999 |
|
RU2143719C1 |
| СПОСОБ АВТОМАТИЧЕСКОГО УПРАВЛЕНИЯ В НЕЛИНЕЙНОЙ СИСТЕМЕ И СЛЕДЯЩАЯ СИСТЕМА ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 1999 |
|
RU2149437C1 |
Изобретение относится к системам автоматического регулирования и может использоваться в системах,где наряду с резкимом слежения имеется режим программной установки на заданную координату или режим ввода в зону слежения. Целью изобретения является повышение качества управления, в частности быстродействия, при отработке больших рассогласований. Следящая система содержит три сумматора, корректирующее звено, два усилителя, двигатель, объект управления, датчики рассогласования и скорости, ключ, блок коммутации и блок управления, который содержит квадратор, уёштитель, сумматор и релейный элемент с зоной нечувствительности. Сущность изобретения заключается в контроле с помощью блока управления i величины соотношения ошибки регули(Л рования и квадрата скорости объекта и выработке корректирующего релейно-. го сигнала управления на корректирующее звено. 1 з,п. ф-лы, 2 ил. СО on сд
| Приспособление для разматывания лент с семенами при укладке их в почву | 1922 |
|
SU56A1 |
| Кипятильник для воды | 1921 |
|
SU5A1 |
| Основы проектирования следящих систем./Под ред | |||
| Н.А.Дакоты | |||
| М.: Машиностроение, 1978, с.161, pwc.V.S. | |||
