Изобретение относится к области систем автоматического управления, в частности к технике формирования управляющих сигналов и может найти применение в следящих системах автоматического управления и регулирования с люфтом в механической передаче.
Известен способ автоматического управления, реализованный в следящей системе с люфтом. Данный способ заключается в суммировании усиленного регулятором сигнала ошибки с сигналом коррекции, который формируют путем преобразования сигнала, пропорционального текущему значению люфта, в сигнал с тем же знаком и с постоянной амплитудой, равной полузоне люфта, и дифференцирования полученного сигнала (А.С. N 521550 МКИ6 G 05 B 11/01// В.Б. Житков, Н. А. Лакота и др. Следящая система с люфтом. Опубликовано 05.10.76. Бюллетень N 26).
Недостатком данного способа является то, что точность компенсации люфта существенно зависит от точности установки коэффициента пропорциальности между текущим значением люфта и непродифференцированным сигналом, а также от точности установки коэффициентов дифференциатора. К тому же данное решение конструктивно трудно осуществить, так как передаточная функция дифференциатора должна быть обратной передаточной функцией двигателя.
Известен способ автоматического управления, который выбран в качестве прототипа для заявляемого способа. Данный способ заключается в суммировании сигнала ошибки с импульсным сигналом коррекции, который формируют в момент наличия люфта путем вычитания текущего значения люфта из сигнала, равного значению полузоны люфта и имеющего знак, совпадающий со знаком сигнала ошибки (Патент N 2114455 МКИ6 G 05 B 11/01, 5/01//. Б.В. Сухинин, Ю.Г. Нечепуренко, В.И. Ловчаков, В.В. Сурков. Способ автоматического управления в системе с люфтом и следящая система для его осуществления. Опубликовано 27.06.98. Бюллетень N 18).
Несмотря на то, что данный способ управления по формированию сигнала коррекции более удачен, чем предшествующий, однако он имеет тот же недостаток: низкие значения точностных и динамических характеристик, так как и здесь точность компенсации люфта существенно зависит от точности установки коэффициента равного полузоне люфта. К тому же в процессе эксплуатации следящей системы возможны случайные изменения предельной величины люфта в механической передаче.
Известна следящая система с люфтом, которая содержит последовательно соединенные измеритель рассогласования сигнала задания и сигнала единичной обратной связи, регулятор, первый сумматор, двигатель с датчиком угла, нелинейное звено типа "зона нечувствительности" - модель люфта и объект управления с датчиком угла, причем выходы датчиков угла двигателя и объекта управления связаны со входами второго сумматора, выход которого через последовательно соединенные нелинейный элемент типа "насыщение" и дифференциатор подключены ко входу первого сумматора, при этом система охвачена отрицательной единичной обратной связью (А.С. N 521550 МКИ6 G 05 B 11/01.// В.Б. Житков, Н.А. Лакота и др. Следящая система с люфтом. Опубликовано 05.10.76. Бюллетень N 26).
Однако данное устройство не обеспечивает требуемой точности и динамических характеристик следящей системы с люфтом из-за погрешности установки коэффициента пропорциональности между текущим значением люфта и непродифференцированным сигналом и погрешностей установки коэффициентов дифференциатора. К тому же данное решение конструктивно трудно осуществлять, так как передаточная функция дифференциатора должна быть обратной передаточной функцией двигателя.
Известна следящая система с люфтом, которая взята в качестве прототипа для заявляемого устройства компенсации люфта в механической передаче. Данная следящая система с люфтом содержит последовательно соединенные измеритель рассогласования сигнала задания и сигнала единичной главной обратной связи, первый сумматор, регулятор, двигатель с датчиком угла, нелинейное звено типа "люфт" и объект управления с датчиком угла, выход которого соединен с вычитающим входом измерителя рассогласования, второй сумматор, один вход которого связан с выходом датчика угла двигателя, а второй вычитающий вход связан с выходом датчика угла объекта управления, выход второго сумматора связан с первым вычитающим входом третьего сумматора, второй суммирующий вход которого соединен с выходом релейного элемента, вход которого соединен с выходом измерителя рассогласования, выход третьего сумматора соединен со вторым входом первого сумматора (Патент N 2114455 МКИ6 G 05 B 11/01, 5/01.// Б.В. Сухинин, Ю. Г. Нечепуренко, В.И. Ловчаков, В.В. Сурков. Способ автоматического управления в системе с люфтом и следящая система для его осуществления. Опубликовано 27.06.98. Бюллетень N 18).
Однако данное устройство не обеспечивает требуемой точности и динамических характеристик следящей системы с люфтом из-за погрешности установки коэффициента равного полузоне люфта. К тому же в процессе эксплуатации следящей системы возможны случайные изменения предельной величины люфта в механической передаче.
Задачей настоящего изобретения является повышение точности компенсации люфта и улучшение динамических характеристик следящей системы путем более точного периодического автоматического определения значения полузоны люфта в механической передаче в процессе работы.
Данная задача решается тем, что в способе автоматического управления в системе с люфтом, когда сигнал ошибки суммируют с импульсным сигналом коррекции, который формируют в момент наличия люфта путем вычитания текущего значения люфта из сигнала, равного значению полузоны люфта и имеющего знак, совпадающий со знаком сигнала ошибки, сигнал, равный значению полузоны люфта и имеющий знак, совпадающий со знаком сигнала, ошибки формируют путем непрерывного запоминания предыдущей максимальной величины текущего значения люфта.
Данный способ может быть использован в любой следящей системе с люфтом для управления двигателем различного типа.
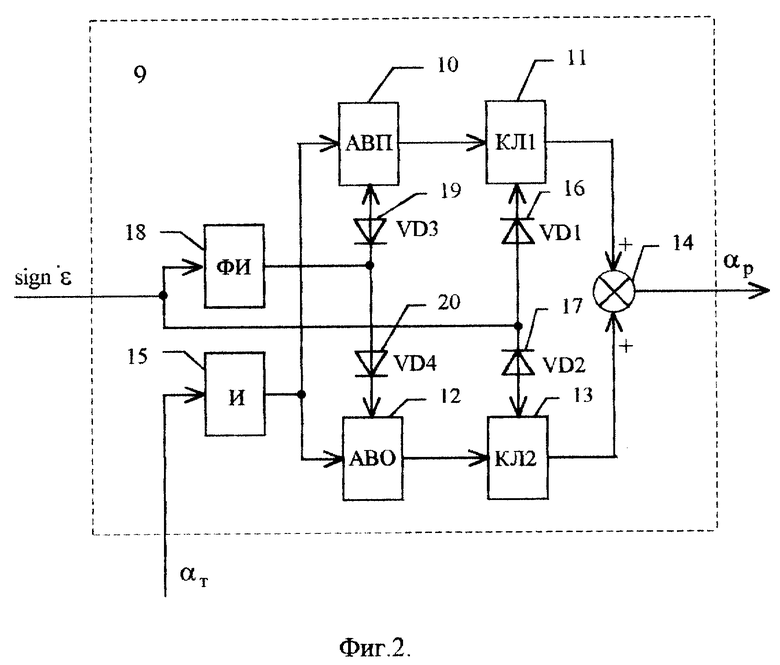
Предлагаемый способ реализуется в следящей системе с люфтом, содержащей последовательно соединенные измеритель рассогласования сигнала задания и сигнала единичной главной обратной связи, первый сумматор, регулятор, двигатель с датчиком угла, нелинейное звено типа "люфт" и объект управления с датчиком угла, выход которого соединен с вычитающим входом измерителя рассогласования, второй сумматор, первый вход которого связан с выходом датчика угла двигателя, а второй вход связан с выходом датчика угла объекта управления, третий сумматор, вычитающий вход которого соединен с выходом второго сумматора, а выход третьего сумматора соединен с входом первого сумматора, релейный элемент, вход которого соединен с выходом измерителя рассогласования. В следящую систему дополнительно введен адаптивный блок определения значения полузоны люфта, один вход которого связан с выходом релейного элемента, а второй вход связан с выходом второго сумматора, выход адаптивного блока определения значения полузоны люфта соединен с суммирующим входом третьего сумматора, причем адаптивный блок определения значения полузоны люфта содержит две цепи последовательно соединенных амплитудного выпрямителя положительного напряжения и первого ключа и амплитудного выпрямителя отрицательного напряжения и второго ключа, выходы ключей соединены со входами четвертого сумматора, а выход четвертого сумматора является выходом адаптивного блока определения значения полузоны люфта, входы амплитудных выпрямитилей соединены с выходом инвертора напряжения, вход которого является вторым входом адаптивного блока определения значения полузоны люфта, первый вход адаптивного блока определения значения полузоны люфта одновременно соединен через первый диод со входом управления первого ключа, через второй диод со входом управления второго ключа и ко входу формирователя импульсов типа дифференцирующей RC цепи, выход формирователя импульсов соединен через третий диод ко входу цепи сброса амплитудного выпрямителя положительного напряжения и через четвертый диод - ко входу цепи сброса амплитудного выпрямителя отрицательного напряжения.
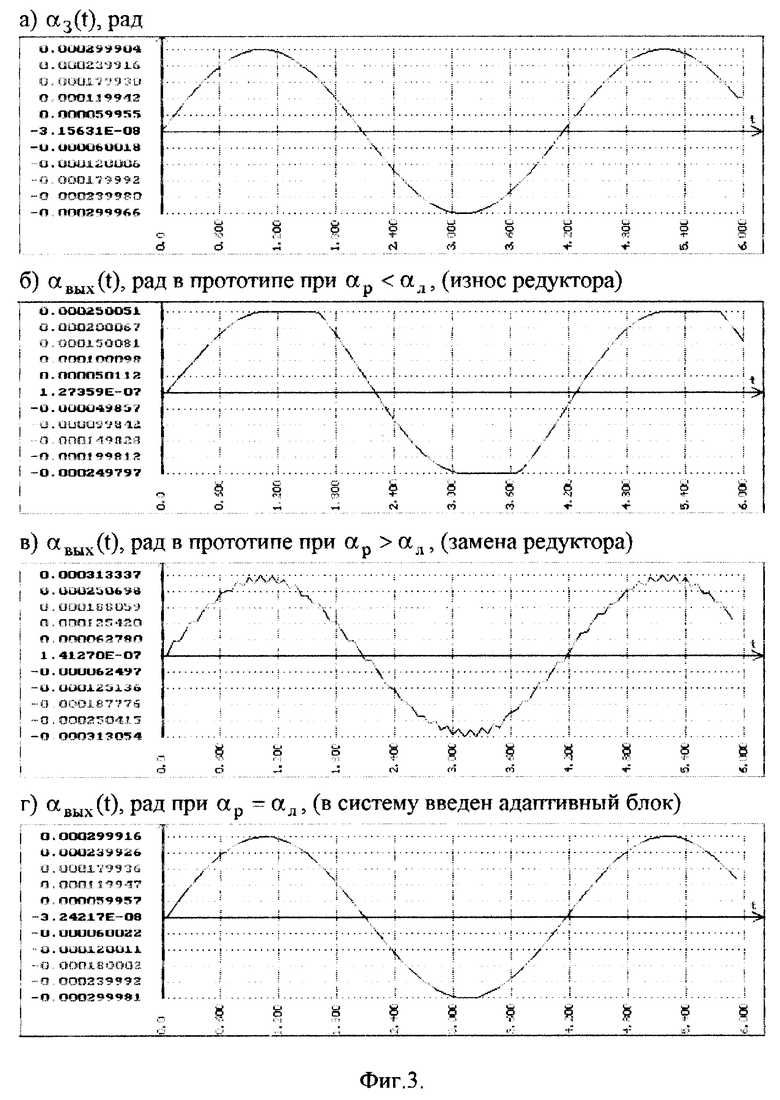
Сущность изобретения поясняется чертежами, где на фиг. 1 представлена структурная схема, реализующая способ автоматического управления в системе с люфтом; на фиг. 2 - пример структурной схемы адаптивного блока определения значения полузоны люфта, на фиг. 3 приведены временные диаграммы работы следящей системы с люфтом, где:
а - диаграмма кривой задающего воздействия αз(t);
б - диаграмма кривой выходного сигнала объекта управления αвых(t) в прототипе при αp< αл, (износ редуктора);
в - диаграмма кривой выходного сигнала объекта управления αвых(t) в прототипе при αp> αл, (замена редуктора);
г - диаграмма кривой выходного сигнала объекта управления αвых(t) в предлагаемой системе при αp= αл, (в систему введен адаптивный блок определения значения полузоны люфта).
Система содержит последовательно соединенные измеритель рассогласования 1 сигнала задания и сигнала единичной главной обратной связи, первый сумматор 2, регулятор 3, двигатель 4 с датчиком угла, нелинейное звено типа "люфт" и объект управления 5 с датчиком угла, выход которого соединен с вычитающим входом измерителя рассогласования 1, второй сумматор 6, первый вход которого связан с выходом датчика угла двигателя 4, а второй вход связан с выходом датчика угла объекта управления 5, третий сумматор 7, вычитающий вход которого соединен с выходом второго сумматора 6, а выход третьего сумматора 7 соединен с входом первого сумматора 2, релейный элемент 8, вход которого соединен с выходом измерителя рассогласования 1, а выход релейного элемента 8 соединен с первым входом адаптивного блока 9 определения значения полузоны люфта, второй вход которого связан с выходом второго сумматора 6, выход адаптивного блока 9 определения значения полузоны люфта соединен с суммирующим входом третьего сумматора 7, причем адаптивный блок определения значения полузоны люфта 9 содержит две цепи последовательно соединенных амплитудного выпрямителя 10 положительного напряжения и первого ключа 11 и амплитудного выпрямителя 12 отрицательного напряжения и второго ключа 13, выходы ключей 11 и 13 соединены со входами четвертого сумматора 14, а выход четвертого сумматора 14 является выходом адаптивного блока 9 определения значения полузоны люфта, входы амплитудных выпрямителей 10 и 12 соединены с выходом инвертора напряжения 15, вход которого является вторым входом адаптивного блока 9 определения значения полузоны люфта, первый вход адаптивного блока 9 определения значения полузоны люфта одновременно соединен через первый диод 16 со входом управления первого ключа 11, через второй диод 17 со входом управления второго ключа 13 и со входом формирователя импульсов 18 типа дифференцирующей RC цепи, выход формирователя импульсов 18 соединен через третий диод 19 со входом цепи сброса амплитудного выпрямителя 10 положительного напряжения и через четвертый диод 20 со входом цепи сброса амплитудного выпрямителя 12 отрицательного напряжения.
Система работает следующим образом. При замкнутом люфте в механической передаче и увеличении сигнала задающего воздействия (фиг. 3а) αз (при движении системы "вверх"), угол αд на выходе двигателя 4 больше угла αвых объекта управления 5 точно на величину полузоны люфта αл(αд= αвых+αл см.фиг.1), следовательно текущее значение люфта на выходе второго сумматора 6 αт= αд-αвых равно полузоне люфта и положительно (αт= +αл> 0). Сигнал ошибки на выходе измерителя рассогласования 1 положителен (ε = αз-αвых> 0) и сигнал на входе третьего сумматора 7 равен значению полузоны люфта при αp= +αл, этом сигнал коррекции αк= αp-αт равен нулю (αк= 0). Работает главная обратная связь следящей системы, и на вход регулятора 3 поступает сигнал с выхода первого сумматора 2 β = ε+αк, равный сигналу ошибки (β = ε).
Если в процессе работы системы значение люфта редуктора изменится, например в результате износа редуктора или его замены, то сигнал αp на входе третьего сумматора 7 не будет равен значению полузоны люфта редуктора (αp≠ +αл), так как действительное значение полузоны люфта αл изменилось в процессе работы, а сигнал αp на входе третьего сумматора 7 остался таким же, при этом сигнал коррекции αк= αp-αт не будет равен нулю (αк≠ 0) при замкнутом люфте, на вход регулятора 3 будет поступать сигнал β = ε+αк, с выхода первого сумматора 2 не равный сигналу ошибки (β ≠ ε) и, следовательно, появляется существенная ошибка слежения. К тому же, из-за того, что в момент наличия люфта (расцепления валов двигателя и нагрузки) сигнал αp на входе третьего сумматора 7 за счет изменившегося люфта редуктора не будет равен значению полузоны люфта редуктора (αp≠ +αл), сигнал коррекции на выходе третьего сумматора 7 не будет соответствовать требуемому, то есть система остается без нужного корректирующего сигнала и, следовательно, люфт не будет скомпенсирован, что приведет к еще большему возрастанию ошибки слежения (фи. 3б, 3в).
Для того, чтобы сигнал на входе сумматора 7 был всегда точно равен значению полузоны люфта редуктора при изменении значения люфта в процессе работы и имел знак, совпадающий со знаком сигнала ошибки, сигнал, равный значению полузоны люфта и имеющий знак, совпадающий со знаком сигнала ошибки формируют путем непрерывного запоминания предыдущей максимальной величины текущего значения люфта.
Для этого в систему введен адаптивный блок 9 определения значения полузоны люфта. При движении системы "вверх" текущее значение люфта на выходе второго сумматора 6 αт= αд-αвых равно полузоне люфта и положительно (αт= +αл> 0). Сигнал на выходе инвертора напряжения 15 отрицателен и конденсатор амплитудного выпрямителя 12 (В.С. Гутников. Интегральная электроника в измерительных устройствах. - 2-е изд., перераб. и доп. - Л.: Энергоатомиздат. Ленингр. отд-ние, 1988. - 304 с., стр. 121-122) отрицательного напряжения заряжается до максимального отрицательного напряжения, равного полузоне люфта. Аналогично при движении системы "вниз" зарядился конденсатор амплитудного выпрямителя 10 положительного напряжения до максимального положительного напряжения, равного полузоне люфта.
Сигнал ошибки на выходе измерителя рассогласования 1 положителен (ε = αз-αвых> 0) и сигнал на выходе релейного элемента 8 signε > 0. Первый диод 16 и первый ключ 11 открыты, а второй диод 17 и второй ключ 13 закрыты и на выходе адаптивного блока 9 определения значения полузоны люфта αp= +αл, при этом сигнал коррекции αк= αp-αт равен нулю (αк= 0). Работает главная обратная связь следящей системы, и на вход регулятора 3 поступает сигнал с выхода первого сумматора 2 β = ε+αк, равный сигналу ошибки (β = ε), в том числе и при изменяющемся в процессе работы люфте редуктора.
При реверсе двигателя, когда сигнал задающего воздействия αз = начинает уменьшаться, сигнал на выходе датчика угла объекта управления становится постоянным (происходит расцепление валов двигателя 4 и объекта управления 5), сигнал ошибки на выходе измерителя рассогласования 1 изменяет свой знак с плюса на минус (ε = αз-αвых< 0), изменяется также знак и на выходе релейного элемента 8. На выходе формирователя импульсов 18 типа дифференцирующей RC цепи появляется отрицательный короткий импульс, который через открывающийся третий диод 19 подается на вход цепи сброса амплитудного выпрямителя 10 положительного напряжения, приводя к разряду конденсатора амплитудного выпрямителя 10 положительного напряжения. Одновременно с этим отрицательный сигнал с выхода релейного элемента 8 закрывает первый диод 16 и первый ключ 11 и открывает второй диод 17 и второй ключ 13, на выходе адаптивного блока 9 определения значения полузоны люфта появляется сигнал αp= -αл. После разряда конденсатор амплитудного выпрямителя 10 положительного напряжения вновь начинает заряжаться до максимального положительного напряжения, равного полузоне люфта.
Аналогичные процессы происходят в системе при движении "вниз" и последующем реверсе двигателя.
Таким образом, при движении системы "вверх" на выходе адаптивного блока 9 определения значения полузоны люфта появляется сигнал αp= +αл, а при движении системы "вниз" - αp= -αл, то есть сигнал αp, сформированный путем непрерывного запоминания предыдущей максимальной величины текущего значения люфта и всегда точно равный значению полузоны люфта редуктора и имеющий знак, совпадающий со знаком сигнала ошибки, в том числе и при изменяющемся в процессе работы люфте редуктора. На выходе третьего сумматора 7 в момент наличия люфта (расцепления валов двигателя и нагрузки) появляется импульсный форсирующий корректирующий сигнал, заставляющий вал двигателя 4 "прижиматься" к валу нагрузки 5 и двигатель выбирает зону люфта практически мгновенно. В момент соединения валов двигателя 4 и объекта управления 5 корректирующий сигнал вновь становится равным нулю. Выходной сигнал следящей системы с изменяющимся в процессе работы люфтом и предложенным способом управления точно повторяет форму входного сигнала (фиг. 3г).
При этом динамические характеристики следящей системы с люфтом с предложенным способом управления определяются характеристиками линейной системы без люфта.
Точность работы современных систем автоматического регулирования обычно ограничивается величиной зоны люфта механической передачи и объекта управления. Предлагаемый способ позволяет компенсировать люфт при любых величинах люфта, изменяющихся в процессе работы и в любых системах, имеющих механические, гидравлические и пневматические передачи. Это повышает эффективность работы систем автоматического регулирования и расширяет их функциональные возможности.
| название | год | авторы | номер документа |
|---|---|---|---|
| СПОСОБ АВТОМАТИЧЕСКОГО УПРАВЛЕНИЯ В СИСТЕМЕ С ЛЮФТОМ И СЛЕДЯЩАЯ СИСТЕМА ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 1999 |
|
RU2154295C1 |
| СПОСОБ АВТОМАТИЧЕСКОГО УПРАВЛЕНИЯ В СИСТЕМЕ С ЛЮФТОМ И СЛЕДЯЩАЯ СИСТЕМА ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 1997 |
|
RU2114455C1 |
| СПОСОБ АВТОМАТИЧЕСКОГО УПРАВЛЕНИЯ И СЛЕДЯЩАЯ СИСТЕМА ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2004 |
|
RU2289154C2 |
| СПОСОБ АВТОМАТИЧЕСКОГО УПРАВЛЕНИЯ И СЛЕДЯЩАЯ СИСТЕМА ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2004 |
|
RU2296355C2 |
| СПОСОБ АВТОМАТИЧЕСКОГО УПРАВЛЕНИЯ В СИСТЕМЕ С ЛЮФТОМ И СЛЕДЯЩАЯ СИСТЕМА ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2010 |
|
RU2509328C2 |
| СПОСОБ АВТОМАТИЧЕСКОГО УПРАВЛЕНИЯ В НЕЛИНЕЙНОЙ СИСТЕМЕ И СЛЕДЯЩАЯ СИСТЕМА ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 1999 |
|
RU2149437C1 |
| Устройство для предотвращения автоколебаний в следящей системе | 1982 |
|
SU1084722A1 |
| Следящая система | 1981 |
|
SU993202A1 |
| СЛЕДЯЩИЙ ЭЛЕКТРОПРИВОД | 1990 |
|
RU2015519C1 |
| СПОСОБ ПОСЛЕДОВАТЕЛЬНОЙ ПЕРЕДАЧИ И ПРИЕМА ИНФОРМАЦИИ И СИСТЕМА ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2000 |
|
RU2181527C1 |
Изобретение относится к области систем автоматического управления, в частности к технике формирования управляющих сигналов в системе с люфтом. Техническим результатом является повышение точности компенсации люфта и улучшение динамических характеристик следящей системы. Способ управления заключается в том, что при суммировании сигнала ошибки с импульсным сигналом коррекции, который формируют в момент наличия люфта путем вычитания текущего значения люфта из сигнала, равного значению полузоны люфта и имеющего знак, совпадающий со знаком сигнала ошибки, сигнал, равный значению полузоны люфта и имеющий знак, совпадающий со знаком сигнала ошибки, формируют путем непрерывного запоминания предыдущей максимальной величины текущего значения люфта. Следящая система с люфтом для осуществления способа содержит измеритель рассогласования сигнала задания и сигнала единичной главной обратной связи, три сумматора, релейный элемент, регулятор, двигатель с датчиком угла, нелинейное звено типа "люфт", объект управления с датчиком угла и адаптивный блок определения значения полузоны люфта. 2 с.п. ф-лы, 3 ил.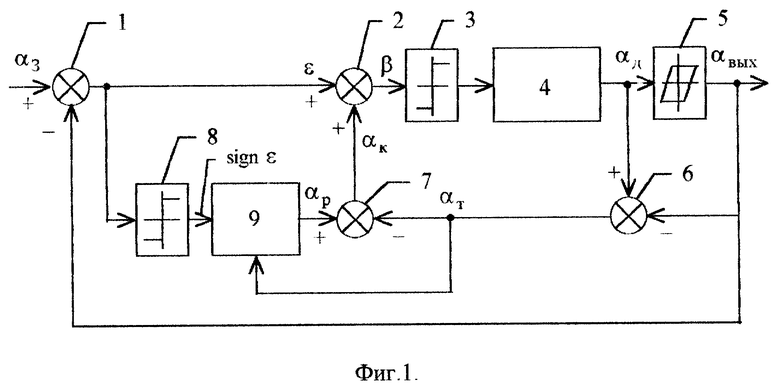
| СПОСОБ АВТОМАТИЧЕСКОГО УПРАВЛЕНИЯ В СИСТЕМЕ С ЛЮФТОМ И СЛЕДЯЩАЯ СИСТЕМА ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 1997 |
|
RU2114455C1 |
| Следящая система с люфом | 1974 |
|
SU521550A1 |
| Устройство компенсации люфта | 1979 |
|
SU1104463A1 |
| Следящий электропривод с компенсацией люфта | 1974 |
|
SU535550A1 |
| Система передачи данных | 1982 |
|
SU1080180A1 |
| US 3560830 A, 02.02.71. | |||
