Изобретение, относится к хими:ческой промышленности и может быть использовано, например, при управлении процессом формирования поликапроамидного волокна,
Целью изобретения является повьшение быстродействия системы.
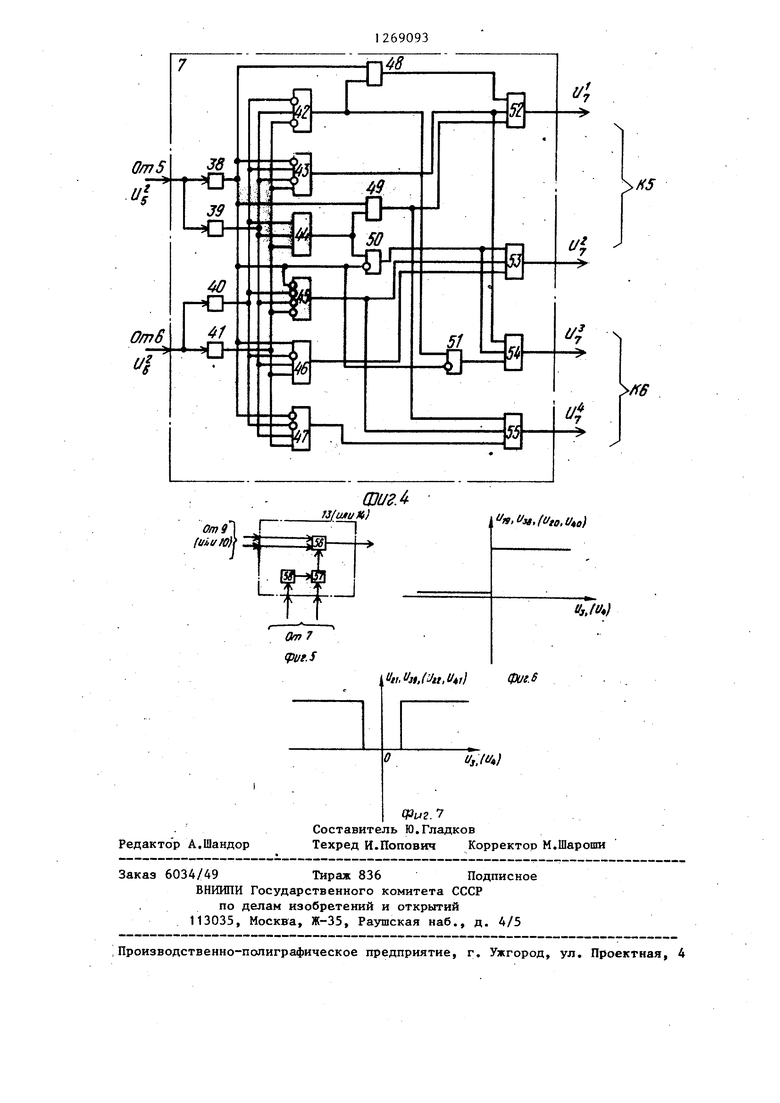
На фиг,1 представлена блок-схема системы; на фиг,2 - принципиальная ;схема первого варианта логического блока; на фиг,3 - принципиальная схема первого варианта трехпозиционного переключателя; на фиг, 4 принципиальная схема второго варианта логического блока на фиг,5 - принци- is пиальная схема второго варианта трех позиционного переключателя на фиг,6 и 7 - статические характеристики пороговых элементов логического блока, Система управления содержит первый 1 и второй 2 задатчики, первый 3 и второй 4 измерители рассогласования, первое 5 и второе 6 регулирующи:е устройства, логический блок 7, объект 8 управления, источники 9 и 10 постоянного сигнала, масштабирующие элементы 1 1 и 12, трехпозиционные переключатели 13 и 14, сумматоры 15 и 16, первый 17 и второй 18 исполнительные механизмы, пороговые элементы 19-22, элементы И 23-30, элементы ИЛИ 31-34 ключи 35 и 36, сумматор 37, пороговые элементы 38-41, элементы И 42-5,1, элементы ИЛИ 52-55, ключи 56 и 57, пороговый элемент 58, интеграторы 59 и 60. Кроме того, U; - сигнал на выходе i-ro блока (или элемента), U; - сигнал на J-M выходе i-ro блока (или элемента), В состав первого варианта логического блока 7 (фиг,2) рходят пороговые элементы 19-22, элементы И 23-30 и элементы ИЛИ 31-34, Пороговые элементы 19 и 20 имеют статические характеристики, представленные на фиг.6, Статические характеристики пороговых элементов 21 и 22.представлены на фиг. 7. В состав первого варианта трехпозиционного переключателя 13 (или 14) (фиг,3), входят ключи 35 и 36 и сумматор 37, Первый вариант логического блока 7 работает в комплексе с трехпозиционными переключателями 14, реализованными по первому варианту выполнения (фиг,3).
В состав второго варианта логического блока 7 (фиг.4) входят пороговые элементы 38-41, элементы И 42-51 и элементы ИЛИ 52-55,
Статические характеристики пороговых элементов 38 и 40 представлены на фиг,6, статические характеристики пороговых элементов 38 и 41 - на фиг,7,
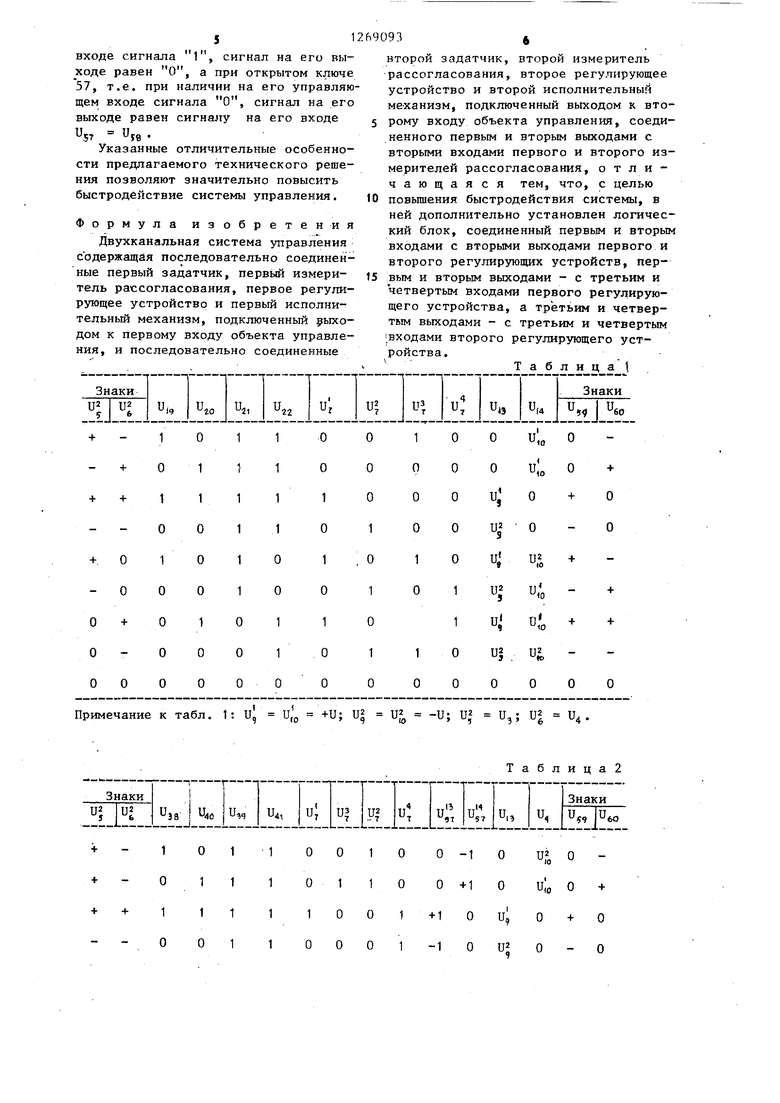
В состав второго варианта трехпозиционного переключателя 13 (или 14) (фиг,5) входят ключи 56 и 57 и пороговый элемент 58, Второй вариант логического блока 7 работает в комплексе с трехпозиционными переключаталями 13 и 14, реализованными по второму варианту выполнения (фиг,5), В состав первого регулирующего устройства 5 входят источник 9 постоянного сигнала, масштабирующий элемент 11, трехпозиционный переключатель 13, сумматор 15 и интегратор 59, В состав второго регулирующёго устройства 6 входят источник 10 постоянного сигнала, масштабирующий элемент 12, трехпозиционный переключатель 14, сумматор 16 и интегратор 60, Масштабирование в регулирующих устройствах 5 и 6 может быть осуществлено как выбором масштабирующих коэффициентов по входам сумматоров 15 и 16, реализованных, например, на операционных усилителях, так и с помощью специально введенных масштабирующих элементов 11 и 12, отмеченных пунктиром на фиг,1. Система работает следующим образом. Выходной сигнал U; первого задатчика 1 сравнивается с первым выходным сигналом Ug объекта 8 управления в первом измерителе 3 рассогласования, на выходе которого формируется сигнал и и, - Ug I - Ug .- Выходной сигнал первого измерителя 3 рассогласоваUния поступает на первый вход первого регулирующего устройства 5, В первом регулирующем устройстве 5 постоянные сигналы разной полярности и„. Ug поступают на информационные входы трехпозиционного переключателя 13, на управляющие входы кото рого поступают сигналы U, U с первого и второго выходов логического блока 7, Выходной сигнал трехпозиционного переключателя 13 интегрируется в интеграторе 59 и поступает на первый вход сумматора 15, в котором сум мируется с масштабированным выходным сигналом и первого измерителя 3 рас согласования. На выходе сумматора 15 формирзгётся канал К К,. х X К,5 и - коэффициенты мас штабирования по первому и второму входам сумматора 15, В общем случае К if Ф К , В частном случае выполнения первого регулирующего устройства 5 коэффициент масштабирования сигнала рассогласования может быть реализован с помощью введения специальног мacштaбиpyющeгjD элемента 11 с коэффи циентом масштабирования К . В этом случае выходной сигнал U, сумматора 15 имеет вид ь„ и. Ч и. k,, и„ + + k . If2 II f к-,, Вьпсодной сигнал U/f сумматора 15 является первым выходным сигналом и первого регулирующего устройства 57 Этот сигнал поступает к входу пер вого исполнительного механизма 17, который воздействует на первый вход объекта 8 управления, меняя его выходные сигналы Ug, и. Выходной сигнал U второго задатчика 2 сравнивается с вторым выходным сигналом и объекта 8 управления во втором измерителе 4 рассогласования, на выходе которого формируется сигнал и и - и. Выходной сигнал U второго измерителя рассогласования 4 поступает на первый вход второго регулирующего устройства 6. Во втором регулирующем устройстве 6 постоянные сигналы разной полярности U,g и Vfg поступают на информационные входы трехпозиционного переключателя 14, на управляющие входы которого подаются сигналы U| и U., с третьего и четвертого, выходов логического блока 7. Выходной сигнал U( трехпозиционного переключателя 14 интегрируется в интеграторе 60 и поступает на Первый вход сумматора 16, в котором суммируется с масштабированньм выходным сигналом и второго измерителя 4 рассогласования. . На выходе сумматора 16 формируется сигнал и,б Щ -11,+ + KjgUeo, где К , Ц - коэффициенты масштабирования по первому и второму входам сумматора 16. В общем случае К, К . В частном случае выполнения второго регулирующего устройства 16 коэффициент масштабирования сигнала рассогласования может быть реализован с помощью введения специального масштаб1фующего элемента 12 с коэффициентом масштабирования В этом случае выходной сигнал и,, сумматора 16 имеет вид и,б к,, и,, + кд и,. К,б и,„ + к,, X , U4 . Выходной сигнал U,g сумматора 16 является первым выходным сигналом.U(4 второго регулирующего устройства 6, Этот сигнал поступает на вхЬд второго исполнительного механизма 18, который воздействует на второй вход объекта 8 управления, меняя его выходные сигналы Ug и и| , Работа данной системы в значительной степени определяется функционированием логического блока 7, который в зависимости от информации о сигналах на вторых выходах первого 5 и второго 6 регулирующих устройств подключает с помощью трехпозиционных переключателей 13 и 14 по входам интеграторов 59 и 60 постоянные сигналы 1разной полярности или отключает их вообще. Все возможные ситуации, характеризующие состояния первого вари,анта логического блока 7 (фиг.2) и состояния работающих с ним трехпозиционных переключателей 13 и 14, вы-полненньпс по первому варианту (фиг.З) приведены в табл, 1. Все возможные ситуации, характеризующие состояния второго варианта логического блока 7 (фиг.4), и состояния работающих с ним трехпозиционных переключателей 13 и 14, выполненных / по второму варианту (фиг.З), приведены в табл. 2. Во втором .варианте выполнения трехпозиционного переключателя 13 (или 14) (фиг.5) пороговый элемент 58 осуществляет преобразование логических выходных сигналов (О, 1) логического блока 7 в аналоговые сигн-аы, осуществляющие управление ключом 6. Если на входе порогового элемента 58 присутствует логический сигнал 1, то на его выходе формируется анаоговый сигнал +1, а если на его входе присутствует логический сигнал О, то на его выходе -1. При закрытом ключе 57, .е. при наличии на его управляющем 51269 входе сигнала 1, сигнал на его равен О, а при открытом ключе 57, т.е. при наличии на его управляющем входе сигнала О, сигнал на его выходе равен сигналу на его входе 57 ге Указанные отличительные особенности предлагаемого технического решения позволяют значительно повысить быстродействие системы управления. ю Формула изобретения Двухканальная система управления содержащая последовательно соединенвые первый задатчик, первый измери- 5 тель рассогласования, первое регулирующее устройство и первый исполнительный механизм, подключенный 9ыходом к первому входу объекта управления, и последовательно соединенные
ройства.
Таблица 93« второй задатчик, второй измеритель рассогласования, второе регулирующее устройство и второй исполнительный механизм, подключенный выходом к второму входу объекта управления, соединенного первым и вторым выходами с вторыми входами первого и второго измерителей рассогласования, отличающаяся тем, что, с целью повышения быстродействия системы, в ней дополнительно установлен логический блок, соединенный первым и вторым входами с вторыми выходами первого и второго регулирующих устройств, первым и вторым выходами - с третьим и четвертым входами первого регулирующего устройства, а третьим и четвертым выходами - с третьим и четвертым входами второго регулирующего уст


| название | год | авторы | номер документа |
|---|---|---|---|
| Устройство для автоматическогоупРАВлЕНия Об'ЕКТАМи C TPAHC-пОРТНыМ зАпАздыВАНиЕМ | 1979 |
|
SU796789A2 |
| Нелинейное корректирующее устройство | 1983 |
|
SU1126925A1 |
| СПОСОБ ФОРМИРОВАНИЯ СИГНАЛА УПРАВЛЕНИЯ УГЛОВЫМ ДВИЖЕНИЕМ БЕСПИЛОТНОГО ЛЕТАТЕЛЬНОГО АППАРАТА И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2013 |
|
RU2532719C1 |
| Устройство слежения за информационной дорожкой носителя оптической записи | 1988 |
|
SU1638725A1 |
| Регулятор | 1983 |
|
SU1166060A1 |
| УСТРОЙСТВО ДЛЯ ОПРЕДЕЛЕНИЯ ПАРАМЕТРОВ ПРОСТРАНСТВЕННОГО ПОЛОЖЕНИЯ ОБЪЕКТА | 2000 |
|
RU2179736C2 |
| Нелинейное корректирующее устройство | 1990 |
|
SU1755255A1 |
| Нелинейное корректирующее устройство | 1989 |
|
SU1734070A1 |
| Следящая система | 1981 |
|
SU1001008A1 |
| СПОСОБ ФОРМИРОВАНИЯ АДАПТИВНОГО СИГНАЛА УПРАВЛЕНИЯ И СТАБИЛИЗАЦИИ УГЛОВОГО ДВИЖЕНИЯ ЛЕТАТЕЛЬНОГО АППАРАТА И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2013 |
|
RU2569580C2 |

Изобретение относится к области химической промышленности и может быть использовано при управлении процессом формирования поликапроамидного волокна. В системе решается задача компенсации влияния внутренних связей объекта управления. Система состоит из двух каналов. В каждом канале сигнал задания сравнивается с регулируемым сигналом. Полученный сигнал рас согласования поступает на вход регулирующего устройства, которое через исполнительный механизм воздействует на соответствующий вход объекта, меняя регулируемые сигналы. Система содержит логический блок, который анализирует промежуточные координаты регулирующих устройств первого и второго каналов управления и формирует сигналы управления для трехпозиционных переключателей регулирующих устройств. В зависимости от вида управляющего сигнала переключатель, подключенный к источнику постоянного § сигнала, пропускает на свой выход сигнал требуемой полярности или .вооб(Л ще не пропускает его. Этот сигнал интегрируется и суммируется с промасштабированным сигналом рассогласования. Полученный сигнал является выходным сигналом регулирующего устройства. В системе предусмотрено исполь- , зование двух вариантов выполнения логического блока и переключателей. 7 ил.
о о 1
+ - 1 О 1 - + 011
+ + 1 1 1
о 1 о
11
оо
1о
1о
о о
1о
оо
1
о1
о1
+
о
о
1
о
о о Примечание к табл. 1: uj U,j, +U; U UJ,
о о
о о о
о о
1 о о
+
(О
о
о +
1
о
о о
U.I
1 о
и|
о 1
+ +
1
10
1 о и| . и
о
о
о
о
Таблица2 -U; U U,; U U4 . к табл. 2: v +U; U Примечание и- -U; U U,; U, U, .
/
от 5
ЙЛ
uf
25
26
27
ai
Иг
от 6
Фиг. г
ОЛ79 - {алию
I
уг
ul
т
и.
т
/f7Sf /j7i/rff)
Н5
ч
ЛУ
ii.,(ltto,Uto}
fj.lU)
| УСТРОЙСТВО для АВТОМАТИЧЕСКОГО РЕГУЛИРОВАНИЯ | 0 |
|
SU250257A1 |
| Кипятильник для воды | 1921 |
|
SU5A1 |
| Система автоматического управления | 1975 |
|
SU557349A1 |
| Кипятильник для воды | 1921 |
|
SU5A1 |
| Бесекерский В.А | |||
| Динамический синтез систем автоматического регулирования | |||
| М | |||
| : Наука, 1970, С.320321, рис.8.4. | |||
