(54) СИСТЕ/ЛА АВТОМАТИЧЕСКОГО УПРАВЛЕНИЯ
| название | год | авторы | номер документа |
|---|---|---|---|
| Система автоматического управления | 1976 |
|
SU646305A1 |
| Система автоматического управления | 1978 |
|
SU708300A2 |
| Система автоматического управления потенциально опасным объектом | 1981 |
|
SU970314A1 |
| УСТРОЙСТВО ДЛЯ ИЗМЕРЕНИЯ КООРДИНАТ ГЕОМЕТРИЧЕСКОГО ЦЕНТРА ОБЪЕКТА | 1985 |
|
SU1380590A1 |
| Адаптивная система управления потенциально опасным объектом | 1987 |
|
SU1423977A1 |
| Адаптивная система управления потенциально опасным объектом | 1985 |
|
SU1291926A1 |
| Адаптивная система управления потенциально опасным объектом | 1987 |
|
SU1513416A1 |
| Следящая система Фомина | 1990 |
|
SU1798763A1 |
| АНАЛИЗАТОР СЛУЧАЙНЫХ ПРОЦЕССОВ | 1991 |
|
RU2012052C1 |
| Система управления | 1984 |
|
SU1173388A1 |
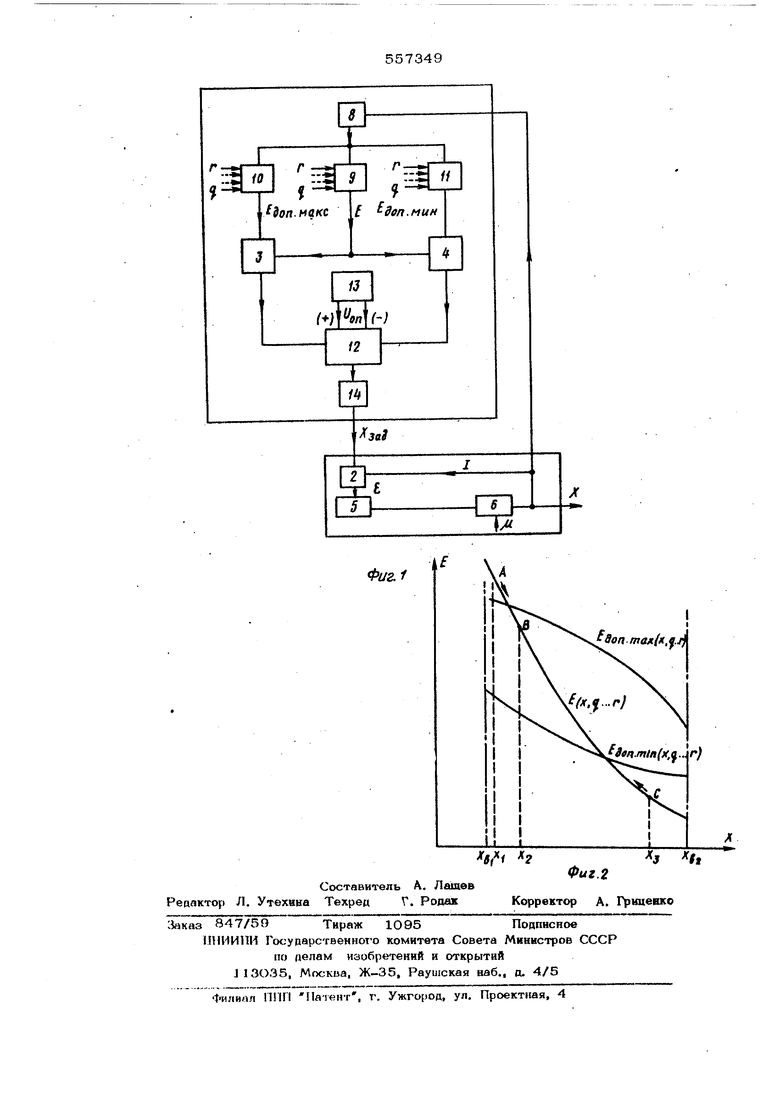
Иэобретеине относится к области автоматического згправления и может быть использовано в тех отраслях технической кибернетики, где требуется произвести операции поиска и удержания некоей функции от регулируемой величины в определен ной области. Системы такого вида осуществляют поиск, цепью которого является отыскание таких значений регулируемой величины х чтобы значение фукции цели E Elx,c...h), fae c...l -внешние параметры, не выходило за границы определенной области АОг,мин{.Ч--)Е Е оплло,кс(.) Известна система автоматического потека, содержащая модулятор, приемник, датчи ки, усилитель-преобразователь, блок управляющях токов и управляемый по частоте ге нератор прямоугольных колебаний 1. Поиск в такой системе ведется путем последовательного перебора всех возможных значений регулируемого параметра (ска нированием) до момента попадания в определенную область. Недостатком подобных систем , обычно именуемых системами со слепым поиском , является большая длительность поиска, обусловленная случайностью выборки или длительностью перебора всех возможных значений, как при первоначальном поиске, так и при выходе в процессе управления значения . функции из определенной заданной области при изменении внешних параметров или по другим причинам. Наиболее близкой по технической сущности к изобретенюо является система автоматического поиска, содержащая последовательно соединенные первый измеритель рассогласования, формирователь сигнала управления, выход которого соединен со входом объекта управления, выход которого соединен с первым входом первого измерителя рассогласования и через датчик регулируемой величины с входами вычислителя функции цели и вычислителей допустимых минимального и максимального значений функции цели, и источник опорного сигнала 2. Недостатком ТАКОЙ системы, является е ннзкое быстродействие. Цепью иаобретенчя является повьпыение быстродействия системы путем сокращекия времени поиска области. Поставленная цель достигается тем, что в предложенной системе установлены второй в третий измерители рассогласования, ключ и интегратор. Выходы источника опорного сигнала соединены с соответствующими вхо дами ключа, выход которого через интегратор соединен со вторым входом первого измерителя рассогласования, Первый и вто рой управляющие входы ключа соединены соответственно через второй и третий изме рители рассогласования с выходами вычислителей допустимых максимального и минимального значений функции цели. Выход вычислителя функции цели соединен со вторыми входами второго и третьего измери.телей рассот ласования. На фиг. 1 представлена блок- зхёма системы; на фтгг. 2 приведен пример графиков функции цели E(x,q.,,r) и ее допу стимых максимального и минимального зна ЕАОП..С..С { X , q ... Ь) и Вд,,,„,,(х,(... по всей области возможных значений регулируемой величины X от X. до Xg для определенных внешних параметров о ... г. На чертежах обозначены основной контур регулирования 1, первый 2, второй Зи третий измерители рассогласования, формирователь сигнала управления 5, объект управления 6, контур подстройки 7, датчик регулируемой величины 8, вычислитель функции цели 9, вычислители максимального и минимального значений функции цели 10, 11, ключ 12, источник опорного сигнала М, интегратор 14, регулируемая величина X , сигнал рассогласования 6 , функция цели Е (х,с... г), допустимые максимальное и минимальное значение функции цели макс Ч-- АОпмнн(Ч ) опор1ый сигнал , , сигнал задания зад внешние возмущения /и Алгоритм работы предлагаемой системы описывается следующими соотнощениями: (р)ХзаА - -- приЕ(х,с,,..,е)(х,с ,и)«Е/х, Х5„д-сонз1|трмЕд„„ „( -доп макс Я KUon npiiE(x,(,..,,r)AE .Аопмик ) р ) - передаточная функция основ- контура i, выбранная так , чтобы ал- Ч - безразмерный коэффициент, ииределж мый конструкцией интегратора 1 Система работает следующим образом. Пусть в некоторый момент (точка А ка иг. 2) управляемая величина X оказбйлась равной X J , а аначенне функции - цели в этой точке Е ( «J,, CJ; .. . г ) - боль шим, чем допустимое максимальное значевве Аоп. ма«с ( ,. ), т.е. вне обла-, сти допустимых значений. Тогда на выходе второго измерителя рассогласования 3 значением функции цели и ее допустимым максимальным значением появляется сигнал, а на выходе третьего измерителя рассогласования 4 сигнал отсутствует. Ключ 12 по дает на вход интегратора 14 положителыный сигнал от источника 13 опорного сигнала. Заданное значение регулируемой величины хзад.,вырабагываемое интегратором 14, непрерывно растет. На выходе измерителя рассогласования 2 между заданным и текущим значениями регулируемой величины, а следовательно, на вxoдe формирователя сигнала управления 5, появляется соответствующий сигнал. Формирователь 5 вырабатывает такой сигнал управления, подаваемый на вход объекта управления 6, чтобы значение регулируемой величины х также росло, т.е., чтобы рассогласование - Av было минимальным. Рабочая точка на кривой Е (фиг. 2) перемещается вправо пока не войдет в область допустимых значений. Скорость движения к заданной области определяется только инерционностью объекта управления и всего основного контура в це- лом, так как на величину опорного сигна- ла UQ и безразмерного коэффициента k не накладывается особых органичений, и они всегда могут- быть выбраны так, чтобы инерционность контура 7 существенно- го влияния не оказывала. в этой области (точка В на фяг. 2) (X2,CJ...h)iE(x,(J...h)iE (лЧ-ОАоп макс Следовательно, на выходе измерителей 3 и 4 сигнал отсутствует, на выходе кл«6ча 12, а следовательно, на входе интегратора 14, сигнал также отсутствует. На выходе интегратора сигнал перестает изменяться, регулируемая величина становится равной заданному значению, на выходе измерителя 2 сигнал отсутствует, а формирователь 5, таким образом удерживает управляемую величину X объекта управления 6 равной Хзал т.е. в заданной области. Система функционирует аналогично, если значение Е ) окажется мень(точка С на фиг.2), ,( Хз,С..Л ) Арп. макс с той разницей, что на ключ 12 подается сигнал с третьего измерителя рассогласования 4, сигнал на выходе ключа 12 отрицательный, значение х на выходе ин- тегратора 14 уменьшается, основной конт гр 1 отрабатывает это значение, т.е. ум шает X вслед за уменьшением х д. . То ка С движется влево, т.е. в сторону ДОПУС ТИМОЕ области.. Если в процессе работы изменення внешних параметров q..i.,h , всл ствие внешних воздействий или по другим причинам значение функции цели вы ходит из допустимой области, система вновь проводит целенаправленный поиск. Как видно из описания И алгоритма работы, использование в системе новых элементов - второго и третьего измерителей рассогласования между значением функции цели и ее допустимыми максимальным и м нимальным значениями, ключа и интегратора - по сравнению с известными системами и устройствами того же назначения значительно ускоряет поиск, делая его направле ным, удушим по кратчайшему пути к определенной заданной области без всякого сле пого (случайного или сканирова1гаем) перебора возможных значений регулируемой величины. Техническая эффективность предлагаемой системы определяется тем, что время поиска в ней практически равно теоретически м нимально возможному Т. , т.е. опреде ляется только инерционностью объекта управления и; «Всего основного KOHTjrpa регулирования 1 в целом и начальными условиями. Среднее время поиска в известных системах Т определяется при псочих равных условиях как ид где Р - вероятность того, что искомая область будет достигнута за теоретически минимально возможное время; Мдо„ - величина ( размер ) области допустимых значений регулируемой величины; величина ( размер ) области возможных значений регулируемой величины. Эффективность предлагаемой системы в указанном смысле всегда больше единицы и тем выше, чем область допустимых значений меныие по сравнению с областью возможных значений. Так, например, современные дозвуковые пассажирские самолеты лета юг на всех высотах 6т О до 11000 метроп. Оптимадьная по километровому расходу топлива скорость полета зависит от ряда параметров (плотность и температура воздуха, полетный вес, скорость и направление ветра и .п.). Допустимый по условиям оотимальности диапазон отклонения от этого оптимального значения порядка 10 км/час. Диапазон скоростей прн тех же условиях не менее 150-200 км/час. Эффективность предяагаемсЛ системы при использовании в оптимизаторе километрового расхода топпива будет порядка 15, т.е. поиск оптимального значения будет осуществлен в среднем в 15 раз быстрее, чем с помощью известных систем. Формула изобретения Система автоматического управления, содержащая последовательно соединенные первый измеритель рассогласования, формирователь сигнала управления,вы ход которого соединен со входом объекта управления,выход которого соединен с первым входом первого измерителя рассогласования и через дат чик регулируемой величины со входами вычислителя функции цели и вычислителей минимального и максимального значения функции цели, и источник опорного сигнала, отличающаяся тем, что, с целью повышения быстродействия системы, в ней установлены второй и третий измерите- ли рассогласорання, ключ и интегратор, причем выходы источника опорного сигнала соединены с соответствующими входами ключа, выход которого через интегратор соединен со вторым входом первого измерителя рас- согласования; первый и второй управляющие входы ключа соединены соответственно через второй и третий измерители рассогласования с выходами вычислителей допустимых максимального и минимального значений ункции цели; выход вычислителя функции ели соединен со вторыми входами второго И третьего измерителей рассогласования. Источники информации, принятые во внимание при экспертизе; 1.Авторское свидетельство СССР № 330429, G 05 В 13/02, О8.07.70. 2. Автоматизация производства и промышленная электроника, под. род. Берга А. И. и др. Из-во Сэветская энциклопедия, т. 3, М., 1964г. стр. 293-208 (прототип).
