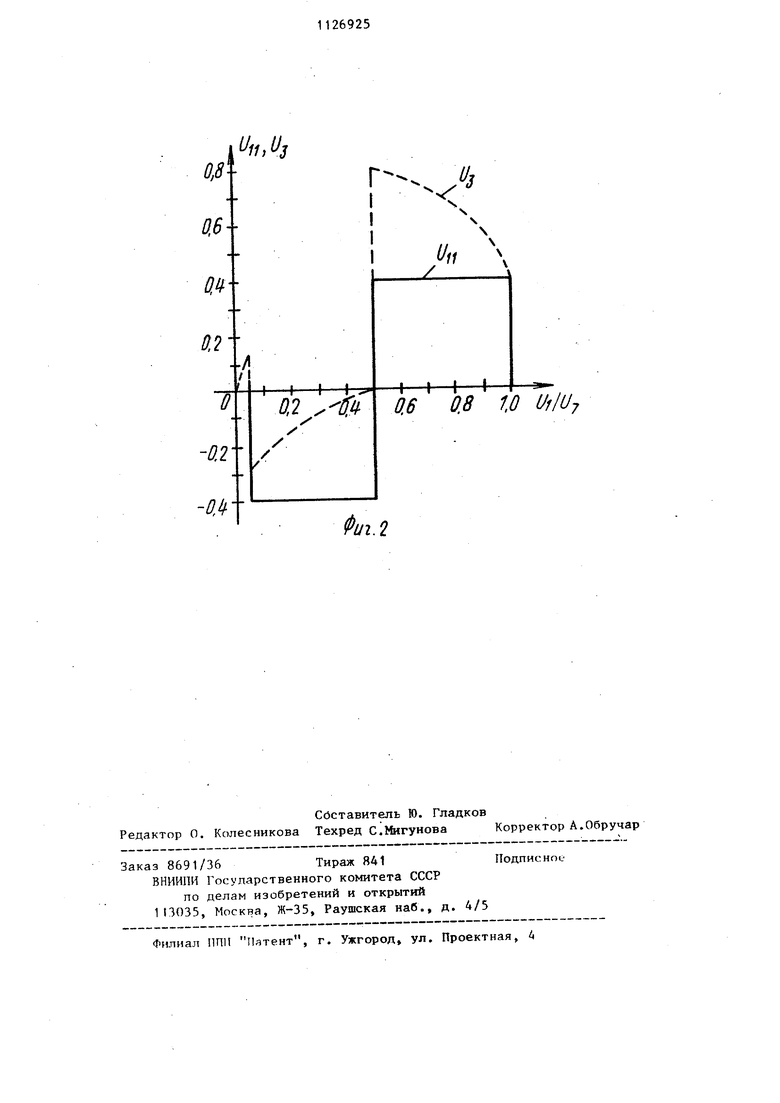
.1 Изобретение относится к двухканал ным нелинейным корректирующим устрой вам и может быть использовано в быстродействую1Щ1Х системах позициони рования, например в станках с програ мным управлением, роботах-манипуляторах и т.п. Известно нелинейное корректирующе устройство, содержащее источник постоянного напряжения, последовательно соединенные первый фильтр, первый усилитель, выпрямитель, первый огран читель, функциональный преобразовате второй ограничитель, сумматор и блок умножения,и последовательно соединен ные второй фильтр, второй усилитель и релейный €лок, входом соединенный с вторым входом блока умножения, источника постоянного напряжения соединен с вторым входом сумматора-, входы первого и второго фильтров соединены между собой l. Недостатки известного корректирующего устройства заключаются в сло ности настро йки, невозможности в широких пределах регулировать требуемое фазовое опережение, которое зависит от частоты входного сигнала, и обеспечить без соответствующей поднастройки оптимальный разгон и торможение исполнительного органа системы автоматического регулирования при изменении величины ее ступенчатого задающего воздействия. Известно также нелинейное коррект рующее устройство, содержащее нульорган, последовательно соединенные усилитель, блок выделения модуля и блок умножения, последовательно соединенные пиковой детектор, масшта бируюи5ий блок, сумматор и сигнумреле, выходом соединенное с вторым входом блока умножения, вход нульоргана соединен с сигнальным входом пикового детектора, вторым входом сумматора и входом усилителя, а вы ход - с управляюп им входом пикового управл а 2. В устройстве устранены основные недостатки указанных нелинейных кор ректирующих устройств, но оно не по воляет получить оптимальное быстродействие в системе, а обеспечивает лишь апериодический квазискользящий переходный процесс. Наиболее близким по технической сущности к данному является устройс во, содержащее нуль-орган, последовательно соединенные усилитель. блок вьщеления модуля и блок умножения, последовательно соединенные второй сумматор, пиковый детектор, первый масштабирующий блок, первый сумматор, сигнум-реле, фopмиpoвaтeJ.ь импульсов,- бло.к задержки и элемент ИЛИ последовательно соединенные ключ и второй масштабирую1вд й блок, подключенный выходом к второму входу второго сумматора, первым входом подключенного к входу усилителя, к второму входу первого сумматора, к сигнальному входу ключа и к входу нуль-органа, выходом подключенного к второму входу элемента ИЛИ, первым входом подключенного к управляющему входу ключа, выход сигнум-реле подключен к второму входу блока умножения 3J. Недостатком известного устройства является его низкое быстродействие.. Введение такого устройства в систему автоматического регулирования приводит к тому, что козффицмент демпфирования системы зависит от величины сигнала рассогласования и возрастает с ее уменьшением, обеспечивая высокое быстродействие в начале переходного процесса и апериодическое движение на участке установления вблизи точки позиционирования. Однако устройство не обеспечивает в системе оптимального режима разгона и торможения с максимально возможным ускорением, так как для этого необходимо иметь нулевой коэффициент демпфирования втечение всего переходного процесса. Увеличение коэффициента усиления устройства для повышения быстродействия приводит к появлению в системе колебательных процессов. Цель изобретения - повьпиение быстродействия устройства. Поставленная цель достигается тем, что в нелинейное корректирующее устройство, содержащее усилитель, последовательно соединенные пиковый детектор, первый масштабирующий блок, первый сумматор и сигнум-реле, последовательно соединеннЕ е второй масштабируюощй блок и второй сумматор, вторым входом соединенньй с вторым входом первого сумматора и с входом нуль-органа, вг 1ходом подключенного к управляющему входу пикового детектора, дополр1ительно введены источник постоянного напряжения и nepBfiiA и второй переключатели, управляющие входы кпторьк подключены к выходу второго сумматора, первые сигнальные входы - к второму входу второго сумматора и к сигналь ному входу пикового детектора, выхо дом соединенного с входом второго I масштабирующего влока вторые сигнальные входы первого и второго переключателей подключены к выходам соответственно сигнум-реле и источника постоянного напряжения, выход второго переключателя соединен с входом усилителя. На фиг.1 представлена блок-схема устройства на фиг,2 - элюры напряжений, характеризующие работы корре тирующего устройства. На фиг.1 приняты следующие обозн чения: измеритель рассогласования 1 блок умножения 2, суммирующее устройство 3, исполнительный двигатель 4 с нагрузкой, датчик скорости 5, нелинейное корректирующее устройство 6, в состав которого входят пико вый детектор 7, первый масштабирующий блок 8, первый сумматор 9, сигнум-реле 10, первый переключатель 11, второй масштабируюн1ий блок 12, второй сумматор 13,. второй переключатель 14, источник постоянного напряжения 15, нуль-орган 16, усилитель 17-2П - вход и выходы нелинейного корректируизщего устройства и - выходной сигнал i-ro функционального блока. Выбор коэффициен та передачи Kg первого масштабирующего блока 8 равным 0,5 обеспечи вает необходимое положение линии переключения с режима разгона на режим торможения, а выбор величины коэффициента передачи К,, второг масштабирующего блока обуславливает переход в установившийся режим посл окончания переходного процесса при подходе к точке позиционирования. Рассмотрим работу нелинейного корректирующего устройства в состав системы автоматического регулирования при коэффициенте передачи второ масштабирующего блока равно 20 ( Устройство работает следунзщим об разом. Пиковый детектор 7 запоминает экстремальное значение сигнала U, формирует на своем выходе сигнал и хранит его до прихода сигнала на сброс с выхода нуль-органа 16. В блоках масштабирования 8 и 12 зна чение сигнала U-j уменьшается соответственно в 2 и 20 раз и сравнивае 25Л ся в сумматорах 9 и 13 с текущим значением сигнала U, . Б зависимости от результата сравнения возможны три режима работы системы. В первом режиме выполняется условие и / |U I ,0, 5U-J. В этом случае выходные сигналы сумматоров 9 и 13 положительны и переключатели 11 и 14 замкнуты на свои вторые входы. Сигнум-реле 10 через первый переключатель 11 выдает на первый вход суммирующего устройства 3 положительный ступенчатый сигнал U требуемой величины, .которая определяется ис1ходя из конкретных параметров систе- , мы регулирования. На второй вход суммирующего устройства 3 подается произведение выходного сигнала Ug датчика скорости 5 на выходной сигнал источника постоянного напряжения 15, про1иед111ий через второй переключатель 14 и усилитель. 17. В результате суммирования на выходе суммирующего устройства 3 образуется управляющее воздействие Uj (см.фиг.2), обеспечивающее оптимальный разгон исполнительного двигателя 4. Во втором режиме работы, когда 0,05Li-,U n,5U-7 выходной сигнал первого сумматора 9 становится отрицательным, а выходной сигнал U, второго сумматора 13 остается положительным. Поэтому переключатели 11 и 14 продолжают находиться в прежнем состоянии, но на выходе сигнум-реле 10 формируется отрицательный ступенчатый сигнал и IQ определенной велйчиш,. В регз-льтате управляющее воздействие Uj на выходе суммирующего устройства 3 имеет вид, обеспечиваю1плй оптимальное торможение исполнительного двигателя (см.фиг.2). Третий режим возникает при подходе к точке позиционирования и ха-. рактеризуется соотношением Oi|( 0,05U-,. В этом режиме выходные сигналы Ug- и и сумматоров 9 и 13 будут отрицательными, в результате переключатели 11 и 14 отсоединяют свои выходы от вторых входов и подсоединяют их к первым входам, пропуская на свои выходы сигнал U . Система в этом случае обеспечивает апериодическое движение в установившемся режиме. Корректирующее устройство 6 формирует управляющий сигнал (см.фиг.2) таким образом, что ком5пенсирует ЭДС исполнительного двигателя 4, обеспечивая его разгон и торможение с максимально возможным ускорением. Рассмотрим .поведение системы регулирования с исполнительным двигателем 4, имеющим передаточную функцию следующего вида , Р( PWOSP I где W4(p) , К , 4 сомэтветственно передаточная функция, коэффициент усиления и постоянная времени испол нительного двигателя 4 с нагрузкой на валу. Дифференциальное уравнение, описывающее поведение системы с учетом выражения (1), примет вид Oj определяетс Значение сигнала режимом работы при Ц/|и,р/0,5и ; О L4-Цо Р 0,05U,|U,,5 ( Ъ, Р a6JU,,05U, , ( где DC величина сигнала на выходе источника 15 постоянного напряжения К - произведение коэффициентов передачи усилителя и датчика ско рости 5. Uio- величина ступенчатого сигнала на вькоде сигнум-реле 10 Если выполнить, условие 1/k4 и подставить уравнения (3)(5) в выражение (2), получим 5 при и, /fUJ i 0,5U (6) .и Ти.,опри 0,,5U ( ти + tu-k м при О . 0,05UT. (8) Уравнения (6) и (7) описывают соответственно разгон и торможение с максимальным ускорением lU |-«.и /г Так, если принять, что максимально допустимое ускорение для двигателя 4 равно, например 400 с то для численных значений (1) получим ,48 Переключение с разгона на торможение происходит при (/. 0,507, Уравнение (8) описы&ает режим вблизи точки позиционирования, когда кинетическая энергия уже погашена предыдущим режимом торможения. Теперь система переходит в устойчивый установиввшйся режим работы с коэффициентом усиления k4обеспечивающим требуемую точность позициониоования. Таким образом, предлагаемое изобретение позволяет повысить быстродействие системы и эксплуатировать исполнительный двигатель с самым высоким 1ШД за счет обеспечения режимов разгона и торможения с максимально допустимым ускорением. Это повышает быстродействие системы на 25-30% и поднимает ее производительность. Оптимальный режим работы ис- . „олнительного двигателя увеличивает эксплуатации, что дает не только технический,, но и экономический эф(31ект.
Uii,U3
| название | год | авторы | номер документа |
|---|---|---|---|
| Нелинейное корректирующее устройство | 1990 |
|
SU1755255A1 |
| Нелинейное корректирующее устройство | 1989 |
|
SU1734070A1 |
| Нелинейное корректирующее устройство | 1984 |
|
SU1226403A2 |
| Нелинейное корректирующее устройство | 1987 |
|
SU1536351A1 |
| Нелинейное корректирующее устройство | 1987 |
|
SU1425594A2 |
| Нелинейное корректирующее устройство | 1989 |
|
SU1635160A1 |
| Нелинейное корректирующееуСТРОйСТВО | 1979 |
|
SU840790A1 |
| Нелинейное корректирующее устройство | 1983 |
|
SU1120276A1 |
| Нелинейная следящая система | 1989 |
|
SU1783468A1 |
| Нелинейное корректирующее устройство | 1988 |
|
SU1576881A2 |
НЕЛИНЕЙНОЕ КОРРЕКТИРУИЦЕЕ УСТРОЙСТВО, содержащее усилитель, последовательно соединенные пиковый детектор, первьвй масштабирукщий блок, первый сумматор и сигнум-реле, последовательно соединенные второй масштабирующий блок и второй сумматор. вторым входом соединенный с вторым входом первого сумматора и с входом нуль-органа, выходом подключенного к управляющему входу пикового детектора, отличающееся тем, что, с целью повышения быстродействия, устройства, в нем дополнительно установлены источник постоянного напряжения и первый и второй переключатели, управляющие входы которых подключены к вькоду второго сумматора, первые сигнальные входы - к второму входу второго сумматора, и к сигнальному входу пикового детектора, выходом соединенного с входом второго масштабируккцего , вторые сигналь-® ные входы первого и второго переклю«Л чателей подключены к выходам соответственно сигнум-реле и источника постоянного напряжения, выход второго переключателя соединен с входом уси- g лителя, ю Од СО ГО ел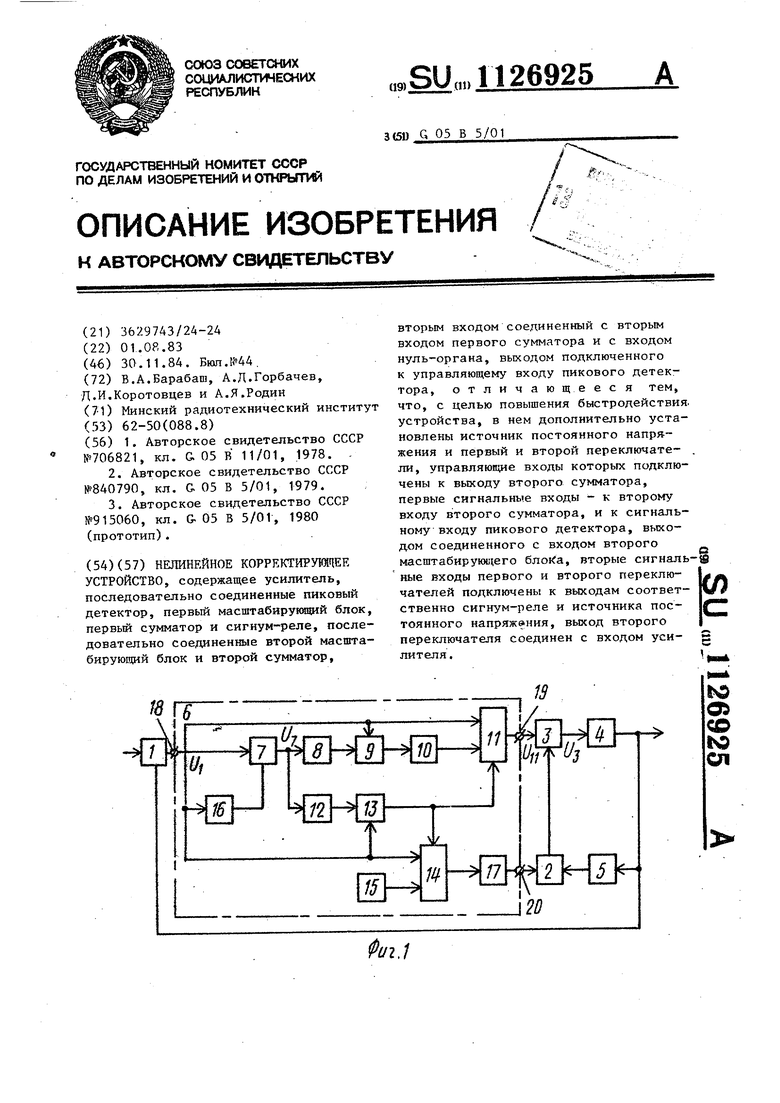
Фиг.г
| Печь для непрерывного получения сернистого натрия | 1921 |
|
SU1A1 |
| Следящая система постоянного тока | 1978 |
|
SU706821A1 |
| С | |||
| Кипятильник для воды | 1921 |
|
SU5A1 |
| Аппарат для очищения воды при помощи химических реактивов | 1917 |
|
SU2A1 |
| Кипятильник для воды | 1921 |
|
SU5A1 |
| Переносная печь для варки пищи и отопления в окопах, походных помещениях и т.п. | 1921 |
|
SU3A1 |
| G | |||
| Кипятильник для воды | 1921 |
|
SU5A1 |
