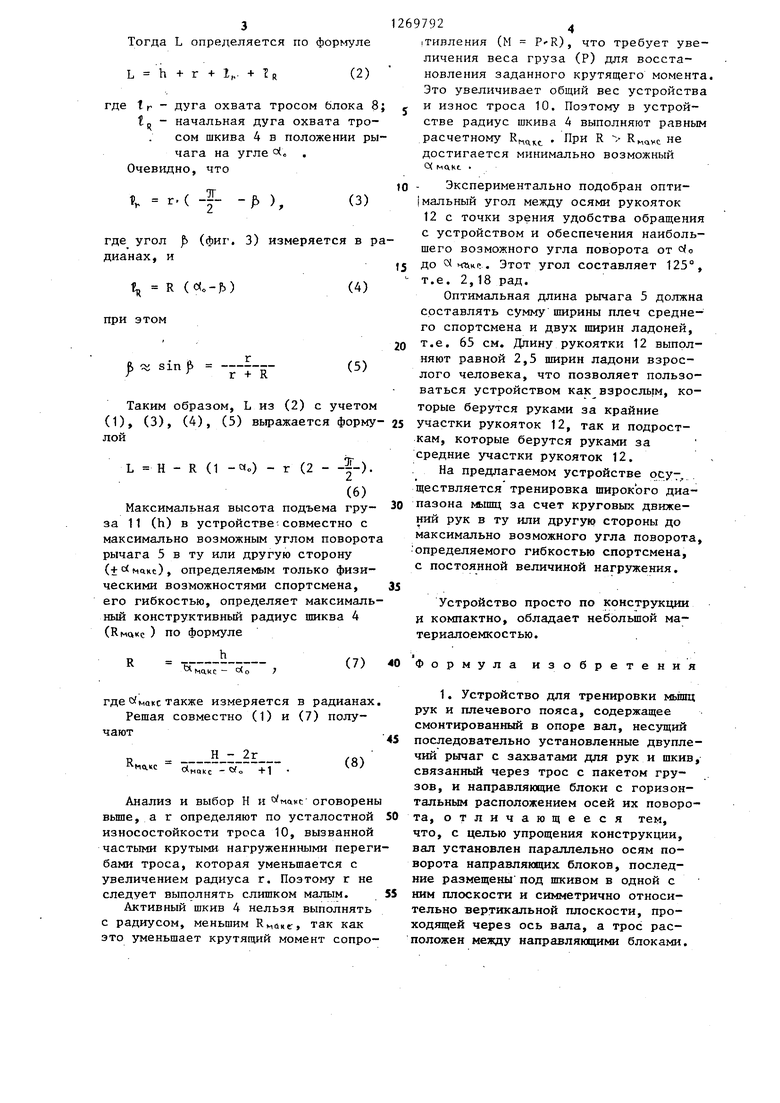
Изобретение относится к тренировочным устройствам для развития и укрепления мускулов и может быть использовано как для общефизической подготовки физкультурников, так и для тренировки спортсменов, в частности борцов, гимнастов и штангистов. Целью изобретения является упроще ние конструкции. На фиг. 1 изображено устройство, вид спереди, разрез; на фиг. 2 - то же, вид сбоку; на фиг. 3 - кинемати ческая расчетная схема устройства; на фиг. 4 - силовая характеристика устройства. I . Устройство содержит раму 1, прикрепленную к опоре, например стене спортза-тта (фиг.2), в которой поворотно посредством подшипников 2 установлен горизонтально вал 3 с прикрепленным к нему последовательно шкивом 4 и двуплечим рычагом 5„ В раме 1 также установлены две оси (5, на каждой из которых через подшипник 7 установлен направляюпщй блок 8. Оба блока 8 расположены под шкивом 4 в его плоскости и симметрично вертикапьной плоскости, проходящей через ось вала 3. На окружной точке шкива 4 вьтолнен поворотный узел 9 закрепления конца троса 10. К свободному концу троса 10 подвешен пакет наборных грузов 11. Двуплечий рычаг 5 ориентирован перпендикзшярно радиусу шкива 4, проведенному к центру поворотного узла 9«ЧЙа обоих концах двуплечего рычага 5 установлены рукоятки 12, вьтолненные в виде втулок с возможностью свободного поворота на рычаге 5, Устройством пользуются следзтшщм образом. Обеими руками берутся за рукоятки 12 и выполняют пойоротные движения рычага 5 в ту или другую сторону относительно оси вала 3 до макси мально возможного угла поворота (± ), При этом, например, в по ложении рычага 5 устройства, изобра женном на фиг. 1 и 3, спортсмен берется правой рукой за левую рукоятку 12 а левой рукой - за правую ру коятку 12 и начинает поворот рычага против часовой стрелки. Этим обепечивается максимально возможный угол закручивания рычага 5 в направлении против часовой стрелки, начиная вра 922 ение рычага с угла + dt. Аналогично, осле обратного перехвата руками за укоятки 12 выполняют вращение рычага в направлении по часовой стрелке, начиная вращение с угла -01„. Рукоятки 12 на рычаге 5 поворачиваются, отслеживая текущее положение руки относительно рычага при его повороте, а груз 11 строго вертикально поднимается и опускается до высоты h (фиг. 3). Общее усилие регулируют набором пакета грузов 11. При изменении угла вращения рычага с + о( на - о( и наоборот трос 10 автоматически перебрасывается, огибая тот или другой блок 8. При работе с устройством возникает постоянный крутящий момент сопротивления (М), равный М РR, где Р вес груза, R - радиус шкива 4, в пределах всего возможного углового интервала поворота рычага 5 - ° макс, + о( исключением углового интервала , +с(„(фиг. 4), где трос не нагружен,. Устройство прикрепляют к стене спортзала с тем расчетом, чтобы высота рукоятей 12, т.е. вала 3 (Н) оказалась на уровне ключиц (плеч) спортсмена. Обычно за основу берут самого высокого спортсмена секции, а спортсмены меньшего роста пользуются подставкой перед устройством. Длину троса (L) выполняют с тем расчетом (фиг. 3), чтобы обеспечить ненагруженный поворот рычага 5, когда груз свободно лежит на полу, в пределах минимального углового интервала - с(а, + J (который определяется физической гибкостью спортсмена), т.е. того минимального угла от горизонтали + о(ьу при котором спортсмен еще может удобно взяться руками за противоположные рукоятки (правой рукой - за левую рукоятку и наоборот). В этом случае обеспечивается наибольший + С моксВ ту И другую сторону. Этот начальный угол определяется длиной троса L следующим образом. Максимальная высота подъема груза 11 (h) в устройстве определяется по формуле h Н - R - 2г где R и г - соответственно радиусы шкивов 4 и 8.
Тогда L определяется по формуле L h + г -f- 1. + IR (2)
где tr - дуга охвата тросом блока 8; tp - начальная дуга охвата тросом шкива 4 в положении рычага на угле oi« Очевидно, что
7Г
, г.( - ),
где угол f (фиг. 3) измеряется в ра дианах, и
1 R (с.-)Ь) при этом
r
6 Si sin j
г + R
Таким образом, L из (2) с учетом (1), (3), (4), (5) выражается формулой
L Н - R (1 -«с) - г (2 - -|-).
Максимальная высота подъема груза 1 1 (h) в устройстве;совместно с максимально возможным углом поворота рычага 5 в ту или другую сторону (+c,t), определяемым только физическими возможностями спортсмена, его гибкостью, определяет максимальный конструктивный радиус шиква 4 ( ) по формуле где и макс также измеряется в радианах Решая совместно (1) и (7) получаютSMQKC - «о +Т Анализ и выбор Н и оговорены вьше, а г определяют по усталостной износостойкости троса 10, вызванной частыми крутыми нагруженнными переги бами троса, которая уменьшается с увеличением радиуса г. Поэтому г не следует выполнять слишком малым. Активный шкив 4 нельзя выполнять с радиусом, меньшим RMQHC, так как это уменьшает крутящий момент сопро2697924
(Тивления (М PR), что требует увеличения веса груза (Р) для восстановления заданного крутящего момента. Это увеличивает общий вес устройства - и износ троса 10. Поэтому в устройстве радиус шкива 4 выполняют равным расчетному R,(t Р не достигается минимально возможный
О( MuKt
to - Экспериментально подобран опти|мальный угол между осями рукояток 12 с точки зрения удобства обращения с устройством и обеспечения наибольшего возможного угла поворота от о 5 до ci . Этот угол составляет 125°, т.е. 2,18 рад.
Оптимальная длина рычага 5 должна составлять сумму ширины плеч среднего спортсмена и двух ширин ладоней, 0 т.е. 65 см. Длину рукоятки 12 выполняют равной 2,5 ширин ладони взрослого человека, что позволяет пользоваться устройством как взросль1М, которые берутся руками за крайние 5 участки рукояток 12, так и подросткам, которые берутся руками за средние участки рукояток 12.
На предлагаемом устройстве осуществляется тренировка широкого диа0 пазона мьшщ за счет круговых движений рук в ту или другую стороны до максимально возможного угла поворота, определяемого гибкостью спортсмена, с постоянной величиной нагружения.
Устройство просто по конструкции и компактно, обладает небольшой материалоемкостью. (7) 0 Формула изобретени я 1. Устройство для тренировки мьшщ рук и плечевого пояса, содержащее смонтированный в опоре вал, несущий последовательно установленные двуплечий рычаг с захватами для рук и шкив, связанный через трос с пакетом грузов, и направляющие блоки с горизонтальным расположением осей их поворота, отличающееся тем, что, с целью упрощения конструкции, вал установлен параллельно осям поворота направляющих блоков, последние размещены под шкивом в одной с ним плоскости и симметрично относительно вертикальной плоскости, проходящей через ось вала, а трос расположен между направляющими блоками.
51269792«
2. Устройство по п.1, о т л и ч а- но установленных на ю щ е е с я тем, что захваты дляучастках двуплечегс1
пук вьтолнены в виде втулок, свобод- га.
концевьгх рыча 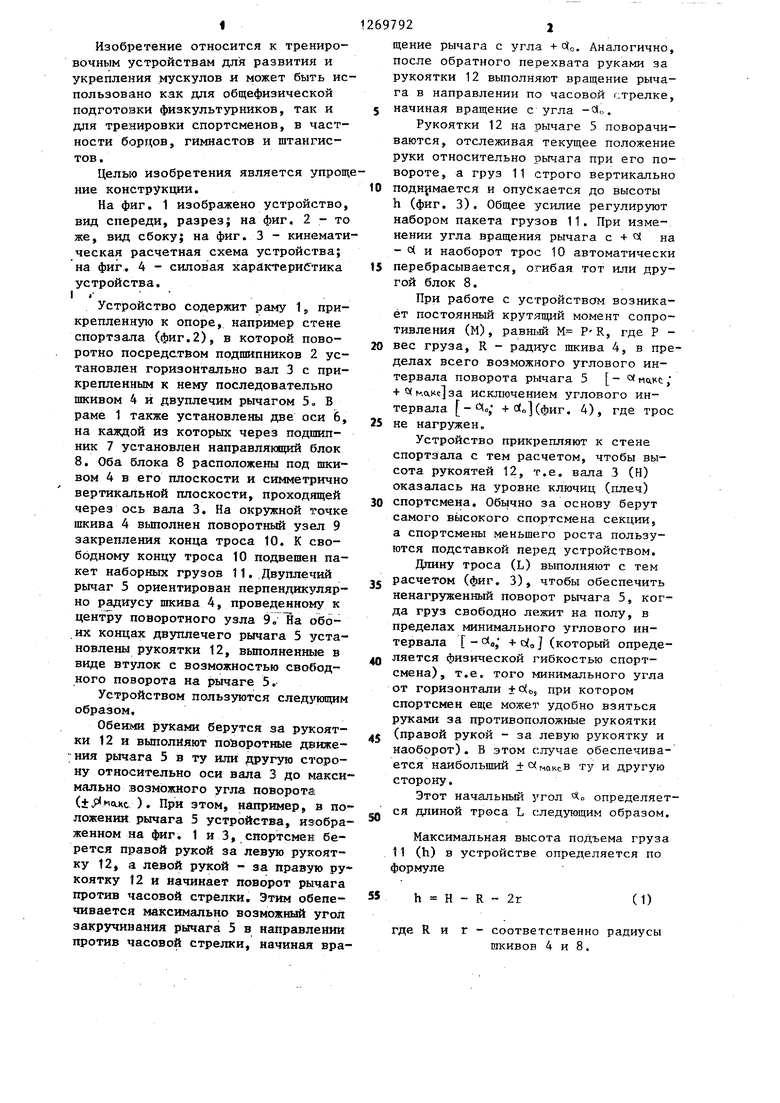
| название | год | авторы | номер документа |
|---|---|---|---|
| Устройство для тренировки мышц | 1988 |
|
SU1586724A1 |
| Устройство для тренировки мышц рук | 1985 |
|
SU1268178A1 |
| Тренировочное устройство | 1986 |
|
SU1389788A1 |
| Спортивный тренажер | 1989 |
|
SU1743620A1 |
| Тренажер | 1988 |
|
SU1643025A1 |
| Устройство для тренировки мышц | 1987 |
|
SU1417891A1 |
| УСТРОЙСТВО ДЛЯ ТРЕНИРОВКИ МЫШЦ | 1990 |
|
RU2016594C1 |
| Устройство для тренировки мышц рук | 1985 |
|
SU1296187A1 |
| УСТРОЙСТВО ДЛЯ ТРЕНИРОВКИ СПОРТСМЕНОВ | 1995 |
|
RU2135244C1 |
| УСТРОЙСТВО ДЛЯ ТРЕНИРОВКИ СПОРТСМЕНОВ | 2000 |
|
RU2178720C1 |
Целью изобретения является упрощение конструкции. Устройство содержит горизонтальный вал, последовательно установленные на нем двуплечий рычаг 5 с рукоятками 12 и шкив 4. Пакет грузов 11 связан со шкивом через трос 10. В полости шкива под ним размещены симметрично вертикальной плоскости два направляющих блока 8. Радиус шкива значительно больше радиуса блоков, поэтому увеличивается долговечность троса. При тренировке берутся руками за рукоятки 12 с перекрещиванием рук в исходном положении. 1 з.п. ф-лы, 4 ил. (Л tc Од ;о 
/////////////////////// ipue.3
| Патент США № 4296924, кл | |||
| Паровоз с приспособлением для автоматического регулирования подвода и распределения топлива в его топке | 1919 |
|
SU272A1 |
