« 1
Изобретение относится к области ашиностроения.
Целью изобретения является повыение надеж1 ости путем компенсации пругой, инерционной и диссипативой сил, действующих в подвижной чати вибратора.
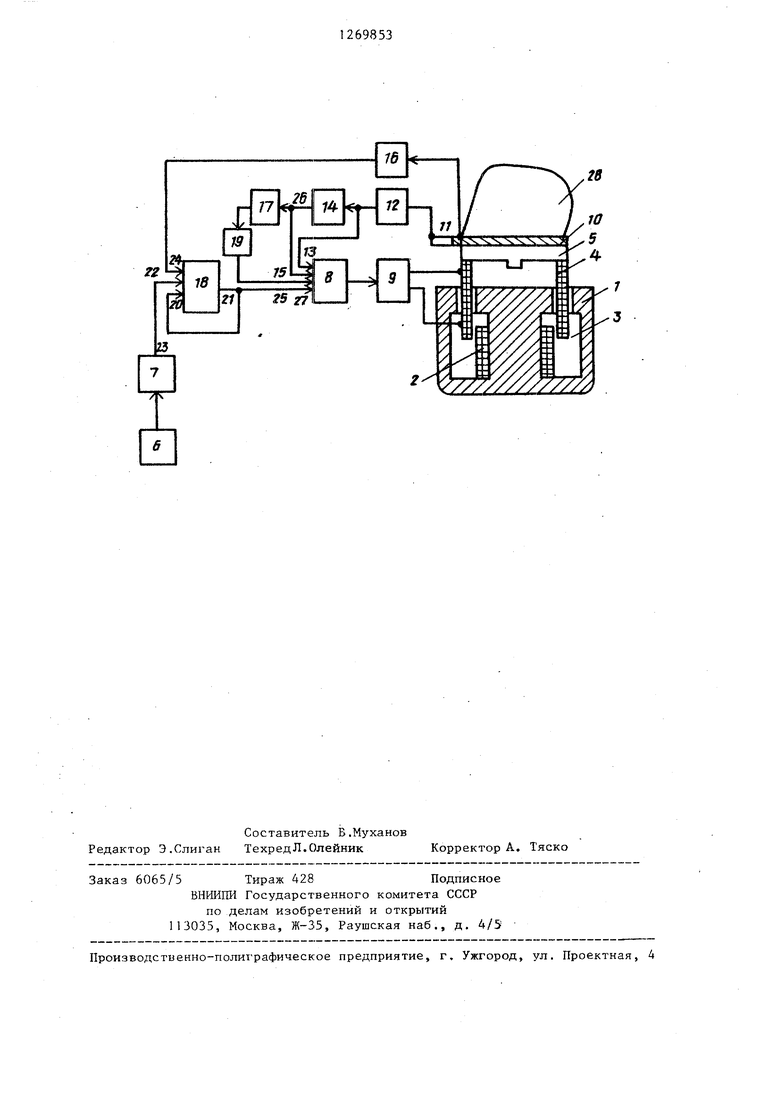
На чертеже схематически изображен ибратор.
Электродинамический вибратор соержит магнитопровод с обмоткой подмагничивания, установленной в агнитном зазоре 3 магнитопровода 1 , подвижн.ую катушку 4, длина котоой больше длины воздушного зазора 3, платформу 5, задающий генератор
6,соединенный с первым усилителем
7,последовательно включенные первый сумматор 8 и усилитель 9 мощности, соединенньш с обмоткой подвиж™ ной катушки 4i на которой установлены датчики усилия 10 и ускорения
11, причем датчик 11 ускорения соединен через второй усилитель 12 с первым входом 13 первого сумматора 8 и через последовательно включенные второй усилитель 12 и первый интегратор 14 - со вторым входом 15 первого сумматора 8. Вибратор снабжен инвертором 16, вторым интегратором 17, вторым сумматором 18 и фазочувствительным блоком 19, причем первьш вход 20 второго сумматора 18 соединен с его выходом 21, второй вход 22 - с выходом 23 первого усилителЯ 7, а третий вход 24 через инвертор 16 - с выходом датчика- 10 усилия, при этом третий вход 25 первого сумматора 8 соединен через последовательно включенные фазочувствительный блок 19 и второй интегратор 17 с выходом 26 первого интегратора 14, а четвертый вход 27 - с выходом 21 второго сумматора 1В. Испытуемый объект 28 установлен на платформе 5, жестко соединенной с подвижной катушкой 4.
Устройство работает следующим образом.
Сигнал с выхода генератора 6 через усилитель 7 поступает на вход 22 второго сумматора 18 и далее через первый сумматор 8 и усилитель 9 мощности на вход обмотки подвижной катушки 4 и вызывает усилие, пропорциональное этому Сигналу, передаваемому цилиндрической катушке 4, платформе 5 и объекту 28, Подвижная ка69853
тушка 4, платформа 5 и объект 28 начинают колебаться,-при этом возникает сила реакции между платформой 5 и объектом 28, которую фиксируют S датчик IО усилия.
Сигнал с выхода датчика 10 усилия поступает через инвертор 16 на третий вход 24 сумматора 18, на первый вход 20 которого поступает его 10 выходной сигнал U,.
о
Таким образом, на выходе сумматора 18 сигнал Hjg равен
(О
4rU a UarW2
15 или
(2)
т.е. сигнал с выхода генератора 6 равен сигналу Цд, который определяет силу реакции.
Координаты перемещения объекта 28 и катушки 4 с платформой 5 теперь зависят только от динамических свойств по.движной части вибратора,
т.е. массы, демпфирования и жесткости подвески подвижной цилиндрической катушки 4 с платформой 5. На выходе датчика 11 ускорения формируется сигнал, пропорциональный ускорению перемещения катупти 4, с платформой 5, который поступает на первый вход 13 сумматора 8 через усилитель 12 с коэффициентом усиления, пропорциональным массе подвижной
части вибратора, и на выходе сумматора 8 вызывает составляющую сигнала, равнук инерционной силе подвижной части вибратора. Этот сигнал подается через усилитель 9 мощности на
обмотку катушки 4 и вызывает силу, равную инерционной силе вибратора, но противоположного знака, и компенсирует ее.
Аналогично компенсируется диссипативная составляющая силы. Для такой компенсации сигнал с выхода усилителя 12 поступает на второй вход 15 сумматора 8 через интегра. тор 14, на выходе 26 которого сигнал пропорционален скорости перемещения подвижной части вибратора. На выходе сумматора 8 сигнал вызывает составляющую силы, пропорциональную диссипативной силе, действующей в подвижной части вибратора.
Сигнал, поступая через усилитель 9 мощности на обмотку катушки 4,. вызьшает усилие, равное диссипативной силе в подвижной части вибратора и противоположного ей знака. Таким образом осуществляется компенсация диссипативной силы. Для компенсации упругой силы . сигнал с выхода интегратора. 14 пост пает на третий вход 25 сумматора 8 через последовательно соединенные фазочувствительный блок 19 и второй интегратор 17. На выходе блока 19 сигнал пропорционален перемещению подвижной части вибратора и скоррек тирован по фазе. Этот сигнал после прохождения через сумматор- 8 вызывает составляющую, пропорциональную упругой силе,действующей в подвижно части вибратора,а после прохождения через усилитель 9 мощности на обмот ку катушки 4 вызывает усилие, равно упругой силе в подвижной части вибратора и противоположного ей знака Таким образом, осуществляется компен сация упругой силы. Сигнал с выхода сумматора 18, равный силе реакции с датчика 10, через сумматор 8 и усилитель 9 мощности поступает на обмотку катушки 4, вызывая усилие, равное силе реакции. , Таким образом, после компенсации инерционной, диссипатийной и упругой составляющих сил, действующих в под,вижной части вибратора, сигнал на выходе усилителя мощности 9 (в обмотке подвижной катушки 4) оказывается равным силе реакции. Изменяя сигнал генератора 6 изменяют силу реакции между подвижной катушкой и объектом. обретения Формула Электродинамический вибратор,содержащий магнитопровод с обмоткой подмагничивания, установленной в магнитном зазоре магнитопривода, подвижную катушку, длина которой больше длинывоздушного зазора, задающий генератор, соединенный с первым усилителем, последовательно включенные первьй сумматор и усилитель мощНОСТИ5 соединенный собмоткой подвижной катушки, и платформу, на которой установлены датчики усилия и ускорения, причем датчик ускорения соединен через второй усилитель с первым входом первого сумматора и через последовательно включенные второй усилитель и первый интегратор - с вторым входом первого сумматора, о тлича)щийся тем, что, с целью повьппения надежности,он снабжен инвертором, вторым интегратором, вторым сумматором и фазочувствительным блоком, причем первый вход второго сумматора соединен с его выходом, второй вход - с выходом первого усилителя, а третий вход через инвертор - с выходом датчика усилия, при этом третий вход первого сумматора соединен через последовательно включенные фазочувствительный блок и второй интегратор с выходом первого интегратора, а четвертый вход с выходом второго сумматора.
| название | год | авторы | номер документа |
|---|---|---|---|
| Электродинамический вибратор | 1980 |
|
SU869842A1 |
| Электродинамический вибратор | 1980 |
|
SU902861A1 |
| Электропривод возвратно-поступательного движения | 1983 |
|
SU1136295A1 |
| Электродинамический вибратор | 1980 |
|
SU977047A1 |
| Устройство для измерения механического импеданса объектов,имеющих собственную подвижность | 1979 |
|
SU894371A1 |
| Электродинамический вибратор | 1978 |
|
SU921637A1 |
| ЭЛЕКТРОДИНАМИЧЕСКИЙ ВИБРАТОР | 1991 |
|
RU2016667C1 |
| Электродинамический вибратор | 1990 |
|
SU1741925A1 |
| СПОСОБ ДИНАМИЧЕСКИХ ИСПЫТАНИЙ ДЕФОРМИРУЕМЫХ ЭЛЕМЕНТОВ | 1991 |
|
RU2085890C1 |
| Электродинамический вибратор | 1979 |
|
SU835527A1 |
Изобретение относится к устройствам управления вибрационным испытанием. Цель изобретения - повышение надежности путем компенсации упругой, инерционной и диссипатив;ной сил, действующих в подвижной части вибратора. Электродинамический вибратор содержит магнитопровод с обмоткой подмагничивания, подвижнз катушку, задающий генератор, первый усилитель, первый сумматор и усилитель мощности, соединенный с обмоткой подвижной катушки, датчики усилия и ускорения, второй усилитель и первый интегратор. Компенсация сил, действукнцих в подвижной части вибратора, обеспечивается тем, что он снабжен инвертором, вторым интеграс S тором, вторым сумматором и фазочув(Л ствительным блоком. 1 ил.
| Устройство для полунатурного моделирования | 1976 |
|
SU661567A1 |
| Приспособление для точного наложения листов бумаги при снятии оттисков | 1922 |
|
SU6A1 |
| Электродинамический вибратор | 1980 |
|
SU869842A1 |
| Приспособление для точного наложения листов бумаги при снятии оттисков | 1922 |
|
SU6A1 |
