(54) УСТРОЙСТВО ДЛЯ ПОЛУНАТУРНОГО МОДЕЛИРОВАНИЯ

| название | год | авторы | номер документа |
|---|---|---|---|
| Устройство для полунатурногоМОдЕлиРОВАНия | 1976 |
|
SU822218A2 |
| Устройство для полунатурного моделирования | 1976 |
|
SU734734A1 |
| Устройство для полунатурного моделирования нелинейных колебательных систем | 1980 |
|
SU947877A1 |
| Устройство для моделирования нелинейных колебательных систем | 1975 |
|
SU607240A1 |
| Устройство для полунатурного моделированияМЕХАНичЕСКиХ КОлЕбАТЕльНыХ СиСТЕМ | 1979 |
|
SU840963A1 |
| Устройство для полунатурного моделирования нелинейных колебательных систем | 1980 |
|
SU926683A1 |
| Устройство для полунатурного моделирования колебательных систем | 1980 |
|
SU922800A1 |
| Устройство для полунатурного моделирования виброударных механических систем | 1983 |
|
SU1251116A1 |
| Устройство для моделирования нелинейных колебательных систем | 1975 |
|
SU516057A1 |
| Устройство для моделирования статических и динамических характеристик привода координатно-шлифовального станка | 1983 |
|
SU1113817A1 |
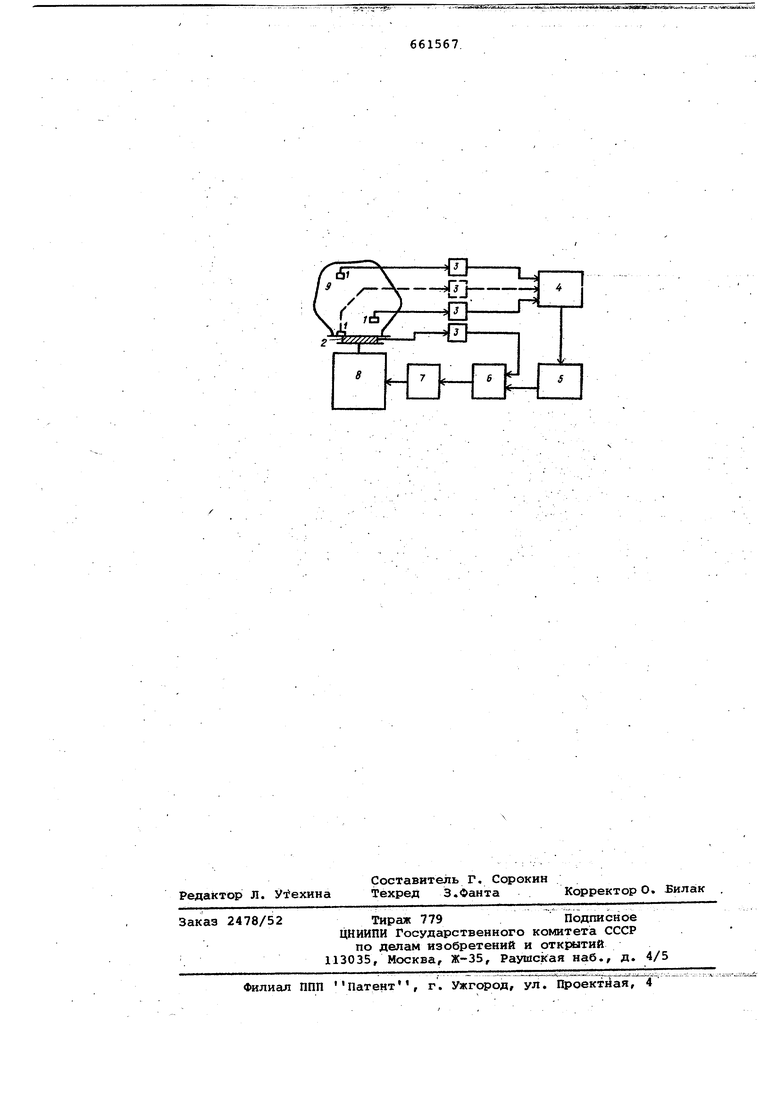
, . . „; J : ; Изобретение относится к об.г1асти аналоговой вычисл;нтельной техники и может быть использовано при моделировании сложных динамических систем содержа1дих реальные объекты. Известно устройство для моделирования нелинейных колебательных систе содержащее датчики параметрсэв, блок делителей, блок моделирования, блок обратной..передаточной функции и усилитель мощности Е1. Однако, это устройство, имеет невысокую точность моделирования. Наиболее близким техническим решением к изобретению является устройство, которое как и предяоженИое устройство,содержит датчики параметров движения объектов, выходы которых через (соответствующие усилители соединены со входами блока моделирования кинематических связей, выход которого соединен с блоком формирования обратной передаточной функции, усилитель мощности, выход которого соединен со входом возбудителя колебаний, и сумматор 2. Кроме того, устройство содержит блок управления параметрами. Однако в этом устройстве возникающая во время его работы нелинейная сила реакции между объектом и столом возбудителя колебаний влияет на движение стола возбудителя колебаний и уменьшает точность имитации электрического сигнала, получаемого на блока моделирования .- :, .. :-ч; ./::.;;;;. ;. ; . . Целью изобретения является довышенйе точности моделирования. Эта цель достигается тем, что предложенное устройство содержит дополнительный усилитель и датчик силы, который уйтаноёлен иа стсше вОзбудителя колебаний и выход |Кбт(эрогр через допоЛнит1ельнь1й усилитель соединён с первым входом сумматора, второй вход которого подключен к выходу блока формирования обратной передаточной функции, а выход сумматора соединен со входом усилителя мощности. Функциональная схема устройства для полунатурного моделирования при-. ведена на чертеже. . Устройство содержит датчики 1 параметров движения объектов,датчик силы. Усилители 3, блок 4 моделирования кинематических связей, блок 5 формирования обратной передаточной Функции, сумматор 6, усилитель 7 мощности и возбудитель колебаний 8.
Устройство работает следующим бразом..Частьдинамической системы, измеением параметров которой можно наиолее эффективно оптимизировать динаическую систему р целом, описывается математически и моделируется в блоке 4 моделирования. Изменением параметров моделирования в блоке 4, как вручную, так и автоматически, можно провести оптимизацию функциониования динамической системы. Модели-Ю уемая часть системы взаимодействует реальной частью динамической сисмы, т.е. с объектом 9, через.блок 5 формирования обратной передаточной функции, сумматор 6, усилитель 7 15 мощности и возбудитель 8 колебаний. В блоке 5 формируется обратная передаточная функция возбудителя 8 ксэлебаНИЙ ;::-,-.;-:,::,;.,-;::/;,: .: ;.v: :-/::г., .,.л , . ;. .
,,. (i) 20
где (Яд коэффициентинерции возбудителя 8 колебаний;
0 - коэффициент диссипативмости улругой подвески;
O|Q- коэффициент жесткости упру- 25 гой подвески.
Если объект можно оценить сосредоточенной Массой, связанной с неподвижнУм основанием жесткости: ийёмпфером (нелинейными или переменными), 30 то автоматичЪской настройкой коэф- фициентов -о (например, градиейтными методами оптимизации их настройки) можно достичь их точного соответствия параметрам возбудителя 35 8, который взаимодействует с объектом, и чтойа произведение ,
(Р )М(2)
Но в практических случаях ot lrleK (, тело человека) явлйе ся 40 дина Чической с многими степейями свободы и поэтому учет влияния инерционных упругих, активных и демпфйрунзвдгх .сил объекта на йоэбудитель колебаний коэффициейтами 45 а2, можйо осущестйить только очень приблизительно.
С .этой целью устройство соде1ржит датчин 2 силы, который измерйе величину cMJOi реакции объекта 9 на50 :стол возбудителя 8 колебаний. С выхода датчика 2 через усилители 3 на вход сумматора 6 поступает сигнал, пропорциональный силе реакций объекта у яа стол возбудителя колебаний 8. .. На другой вход сумматора 6 поступает Сигнал, пропорциойальный силе
F X(a2P -c iP+ao ,3)
где X - выходной сигнал блока 4, .пропорциональный требуемому попо ению объекта 9.60
На выходе сумматора 6 фор шруется напряжение, порпорциональное сумме сил R + F, кот,орое через усилитель 7 мощности передается на возбудитель колебаний 8 таким образом, что на подвижную его часть действует сила F СО стороны входа управления
F,, R-i-)S(),(4)
а со стороны объекта 9 и жесткой подвески стола возбудителя 8 кОлебайий действует сила
FB--R -s(q2pVoi P aoV
г
Так как Р является возбуждающей силой возбудителя, а Fg - сопротивляющейся движению, то стол возбудителя колебаний 8 при приложении всякой силы Fy находится в положении, в коF,., т.е.
тором F,
г-(q.,,
(6) .jp2va,P.ot,)..
Отсюда X а. у, т.е. фактическое эначе ние у положения стола возбудителя 8 колебаний равно требуемому.положению-х.
Формула изобретения
Устройство для полунатурного моделирования, содержащее датчики параметров ДвйЖенияобъектов, выходы которых через соответствующие усилители соединены со входами блока моделирования кинематических Связей, выход ко орого с оединен с блоком формирования о атной передатрчной функции, усилитель мощности, выход которого соединен со входом возбудителя колебаний, и сумматор, отличаюin е е с я тем, что, с целью повышения точности моделирования, оно содержит дополнительный усилитель и датчик сиЛй, который установлен на Возбудителя колебаний и выход KOTopoi O через дополнительный усилитель соединен с первым входом сумматора, второй вход которого подключен к выходу блока формирования обратной передаточной функции, а выход сумматора соединен со входом усилителя мощности.
Источники инфсфмации, принятые во внимание при экспертизе
1,Авторское свидетельство СССР 516057, кл. G 06 G 7/48, 1975.
661567
