Изобретение относится к электротехнике и автоматике и может быть использовано для стабилизации скорое ТТЛ вращения двигателей постоянного тока, Целью изобретения является повышение динамической точности поддерж ния заданной скорости вращения дви гателя, улучше.ние качества переходных процессов Ыовьппение КПД устрой Ства. На чертеже изображено предлагаемо устройство, Устройство для стабилизации ско-. рости вращения двигателя постоянного тока содержит механически связанный с валом двигателя 1 постоянного тока датчик 2 скорости, выход которого со единен с первым входом блока 3 несов падения, вторым входом частотного компаратора 4,первый вход последнего подключен к выходу задающего генератора 5 и входу делителя б частоты, выход которого соединен с вторым входом блока 3, выходы последнего подключены к первым входам элементов 7 и 8 И, выходы которых соединены с суммирукшщм и вычитающим входами реверсивного счетчика 9, а вторые входы - с выходами элементов 10 ИЛИ и tl И-НЕ, входы последних подключены соответственно к старшим (п-р) и п выходяьм разрядам счетчика 9, соединенныни с первыми входами элементов 12 И, вторые входы последних подключены к выходу компаратора 4, а выходы - к входам широтно-штульсного модулятора 13, выход которого соединен с якорной обмоткой двигателя 1 ., Работу устройства рассмотрим на примере разгона двигателя 1 до задан ной скорости вращения. Импульсы частоты q с выхода делителя 6 частоты поступают на суммирующий вход счетчика 9 через блок 3 и элемент 8 И, что вызывает увеличение кода на выходе счетчика 9 на . , и как след ствие, кода . на входах модулятора 13 .Аи „ поскольку элементы 12 И работают как повторители. Это обусловлено единичным сигналом на выходе компаратсфа 4, вызваннь1м превышением частотой q частоты V импульсов дат,чика 2. Увеличение АС вызывает увеличение коэффциента заполнения импульсов модулятора 13, тока t/., обмотки двигателя 1 и вращающегося мона валу двигателя 1, что приментак увеличению скорости вращеводитдвигателя 1„ В случае достижения и ния кодом счетчика 9 максимального значения, равного 2 -1, на выходе элемента И-НЕ появляется уровень логического нуля, закрывающий элемент 8 И и блокирующий поступление импульсов с делителя 6 на суммирующий вход счетчика 9, что предотвращает его переполнение, улучшая тем самым переходные процессы в системе. При превышении частоты Ч на чистотой q на выходе компаратора 4 появляется уровень логического нуля, что вызьшает обнуление кода( А и переводит двигатель 1 в режим динамического торможения, предотвращая тем самым перерегулирование, обусловленное избыточным кодом на выходе счетчика 9, накопленным за время разгона двигателя 1. С течением времени устройство переходит в установившийся автоколебательный режим, характеризующийся изменением на i 1 с частотой q и периодическим срабатыванием комраратора 4 обусловленным колебаниями скорости U вращения двигателя 1 относительно заданной, вызываемыми фяуктуациями нагрузочного момента. Назначение элемента 10 ИЛИ заключается в предотвращении уменьшения кода J% на выходе счетчика 9 ниже 2 -1 путем блокировки поступления импульсов датчика 2 на вычитающий вход счетчика 9 с помощью элемента 7 И. Тем самым предотвращается уменьшение 4(jp ниже значений, соответствующих зоне нечувствительности двигателя 1 по входному напряжению Up и, как следствие, перерегулирование при переходе на более низкую заданную скорость вращения двигателя 1. Значение коэффициента Р компенсации зоны нечувствительности двигат я 1 может быть найдено как минимальное из всех целых Р , удовлетворяющих условию Р и - totj. разрядность счетчика 9; номинальное напряжение двигателя 1 и напряжение при минимально возможной скорости соответственно.
31
Скорость вращения двигателя 1 w связана с частотой i. генератора 5 разрядностью m делителя частоты и количеством импульсов Z, генерируемых датчиком 2 за один оборот, соотношением
зг
Ы
Частота сигнала модулятора 13 цмии бь1ть найдена исходя из допустимого значения коэффициента К (пульсаций вращающего момента АЛ двигателя 1 и составляет 1ГЯ где L, R - индуктивность и активно сопротивление обмотки двигателя 1 соответстве U ° UsAi - допустимый коэффициент пульсаций вращающего мо мента двигателя 1. Разрядность п модулятора 13 и счетчика 9 может быть найдена как максимальное и , удовлетворяющее условию где - максимальная частота сче чика модулятора 13. Разрядность.ш делителя 6 часто найдем как максимальное т, удовле воряющее условию мс.«-2 где :,„„ - максимальная частота счета счетчика делителя 6 частоты; тех - максимальная скорость вращения двигателя 1, подлежащая стабилизации Положительный эффект в устройст достигается введением компаратора и элементов 12 И, позволяющих неограниченно наращивать количество импульсов Z, генерируемых датчиком 2 на один оборот вала, уменьшая те самым пульсации скорости вращения W без потери устойчивости устройства . Наличие в устройстве элемен464
тон 11 п И-НЕ и 10 (п-р) ИЛИ способствует устранению переполнения счетчика 9 при изменении задающей частоты -fjf. и нагрузочного момента , улучшая тем самым переходные процессы по сравнению с прототипом. Применение модулятора 13 позволяет использовать импульсное регулирование напряжения якорной обмотки двигателя 1 при относительно малых пульсациях тока и вращающего момента, обусловленных высокой частотой и,мии и сглаживанием пульсаций тока индуктивностью обмотки двигателя 1, что
способствует повышению КПД устройства. Формула изобретения Устройство для стабилизации скорости вращения двигателя постоянного тока, содержащее датчик скорости, сочлененный с валом двигателя, блок несовпадения, задающий генератор и реверсивный счетчик на п разрядов, причем датчик скорости подключен к первому входу блока несовпадения, отличающе е ся тем, что, с целью повышения КПД, динамической точности и качества переходных процессов, оно дополнительно содержит делитель частоты, частотный компаратор, пшротно-импульсный модулятор, элемент ИЛИ, элемент И-НЕ и п+2 элементов И, причем выход делителя частоты соединен с вторым входом блока несовпадения, а его вход соединен с выходом задающего генератора и первым входом частотного компаратора, второй вход которого подключен к выходу датчика скорости, а выход соединен с первыми входами первых п элементов И, вторые входы которых подключены К выходам соответствующих разрядов реверсивного счетчика, выходы п элементов И соединены с соответствукядими входами широтно-импульсного модулятора, выход которого подключен к якорной обмотке двигателя постоянного тока, выходы всех п разрядов реверсивного счетчика подключены к соответствующим входам элемента И-НЕ, выход которого соединен с первым входом (n-t-l)-ro элемента И, подключенного своим вторым входом к первому выходу блока несовпадения, выходы (п-р) старших разрядов реверсивного счетчика соединены с соответствующими входами элемента ИЛИ, выход которого соединен с первым входом (п+2)-го элемента И, подключенного своим вторым входом к второму выходу блока несов- j падения, выходы (п+1)-го и ()-го элемента И подключены соответственно к суммирующему и вычитающему входам реверсивного счетчика, причем значение Р-коэффициента компен- ю сации зоны нечувствительности дви1270466 гателя находится как минимальное из всех целых р, удовлетворяющих условиюP. где Уц и и„ - номинальное напря;жение и напряжение при минимально возможной скорости вращения соответственно.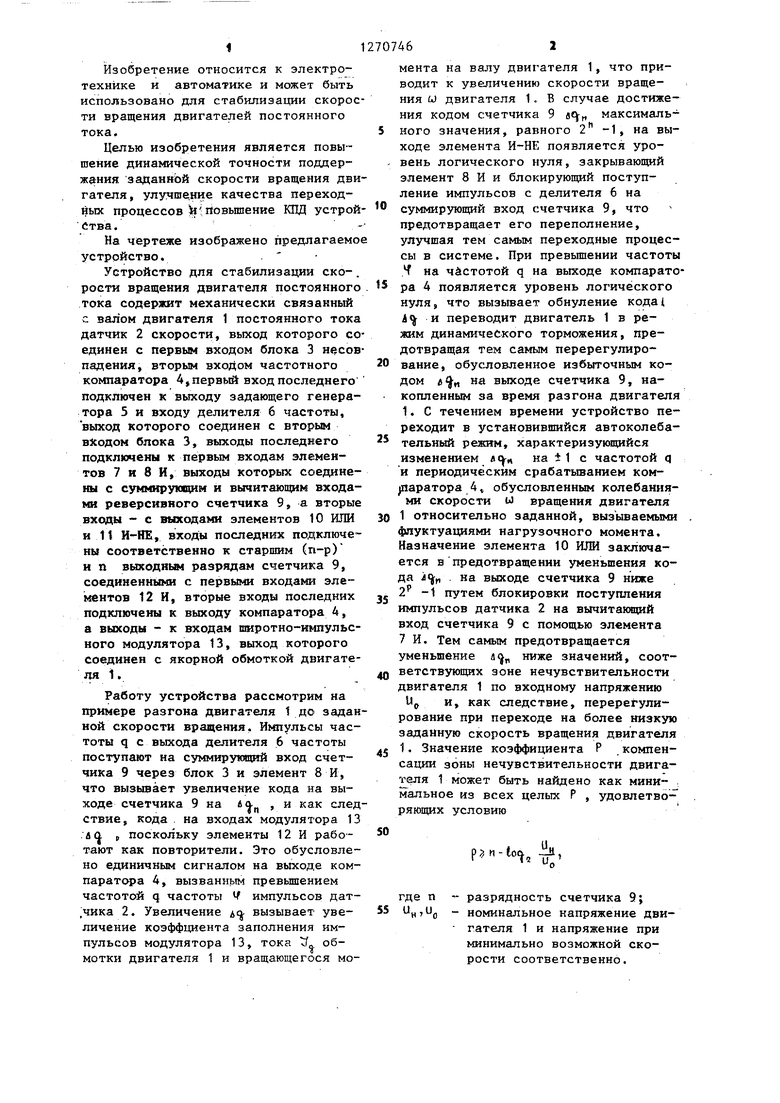
| название | год | авторы | номер документа |
|---|---|---|---|
| Вентильный электродвигатель (его варианты) | 1984 |
|
SU1221699A1 |
| Устройство стабилизации частоты вращения двигателя постоянного тока | 1985 |
|
SU1302250A1 |
| Вентильный электродвигатель | 1985 |
|
SU1464260A1 |
| Устройство стабилизации частоты вращения двигателя постоянного тока | 1986 |
|
SU1401437A1 |
| Инфузионный насос | 1985 |
|
SU1279635A1 |
| Электропривод постоянного тока | 1982 |
|
SU1045344A1 |
| Широтно-импульсное устройство для программного управления приводом | 1981 |
|
SU1020799A1 |
| ИНФРАКРАСНЫЙ РАДИОМЕТР | 1999 |
|
RU2172476C1 |
| Синхронизированный бесконтактный электропривод постоянного тока | 1977 |
|
SU731521A1 |
| Способ фазового управления асинхронным электродвигателем и устройство для его осуществления | 1978 |
|
SU928582A1 |
Изобретение относится к автоматическому регулированию и может быть использовано для стабилизации скорости вращения двигателей постоянного тока. Целью изобретения является повьтение КЦЦ, динамической точности и качества переходных процессов. Указанная цепь достигается тем, что устройство содержит в контуре регулирования, содержащем двигатель постоянного тока, датчик скорости, блок несовпадения, элементы И, реверсивный счетчик и цифровой широтно-импульсный модулятор, дополнительный частотный компаСЛ ратор, исключающий переполнение реверсивного счетчика и уменьшающий тем самым динамические ошибки регулирования. 1 ил.
12 2
«
т
1
| Кулесский Р.А | |||
| и др | |||
| Электроприводы постоянного тока с цифровым управлением | |||
| М.: Энергия, 1973, с | |||
| Способ использования делительного аппарата ровничных (чесальных) машин, предназначенных для мериносовой шерсти, с целью переработки на них грубых шерстей | 1921 |
|
SU18A1 |
| Богорад Г.З | |||
| и др | |||
| Цифровые регуляторы и измерители скорости | |||
| М.-Л.: Энергия, 1966, с | |||
| Бесколесный шариковый ход для железнодорожных вагонов | 1917 |
|
SU97A1 |
