Изобретение относится к области электротехники и автоматики и может быть использовано для стабилизации частоты вращения двигателей постоянного тока.
Целью изобретения является повышение динамической точности и расширение диапазона регулирования частоты врашения дви гателя.
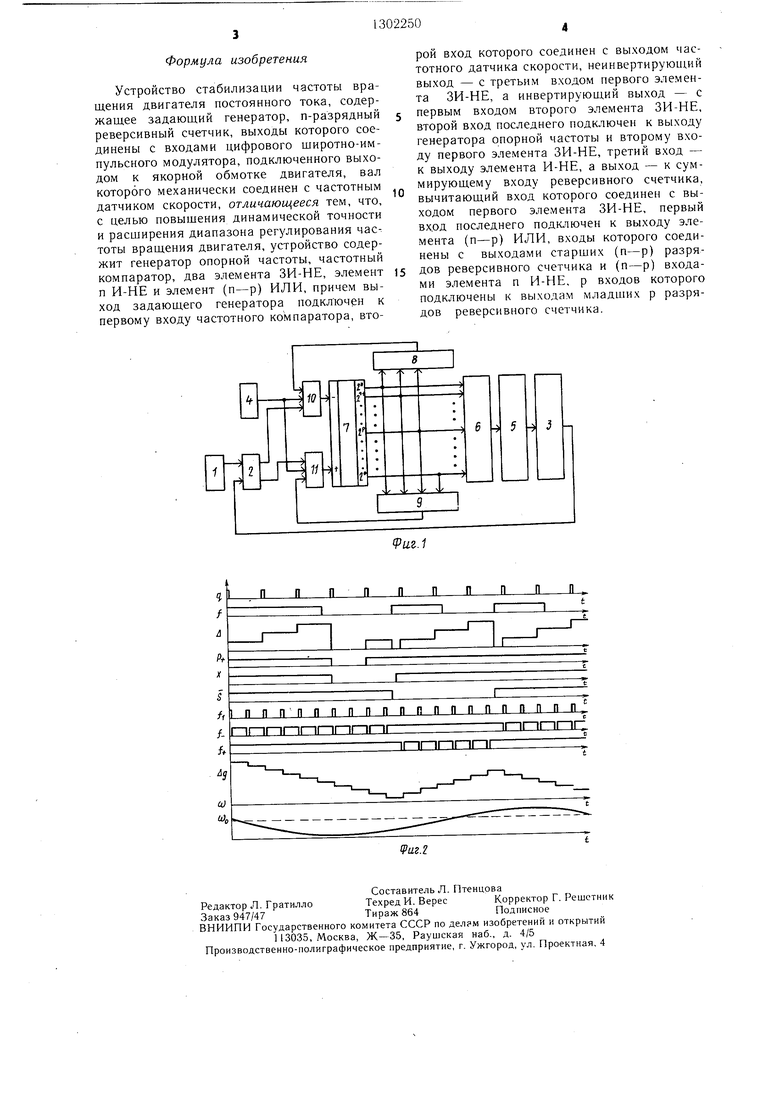
На фиг. 1 представлена функциональная схема устройства; на фиг. 2 - временные диаграммы, поясняюш,ие его работу.
Устройство содержит задаюш,ий генератор 1, частотный компаратор 2, частотный датчик 3 скорости, генератор 4 опорной частоты, двигатель 5 постоянного тока, цифровой широтно-импульсный модулятор 6, реверсивный счетчик 7, элемент (п-р) ИЛИ 8, элемент п И-НЕ 9, первый и второй элементы ЗИ-НЕ 10 и 11.
На фиг. 2 приняты обозначения: q - частота импульсов задаюш,его генератора; f - частота импульсов частотного датчика скорости; S - выходной сигнал частотного компаратора; - сигнал на сумми- руюш,ем входе реверсивного счетчика; .Ag - выходной код реверсивного счетчика; L- сигнал на вычитающем входе реверсивного счетчика; иг- частота вращения двигателя постоянного тока; Z - количество импульсов, генерируемых частотным датчиком скорости на один оборот вала; п - разрядность реверсивного счетчика; m - разрядность счетчика частотного ко.мпаратора; Тцшии - период импульсов цифрового генераторно- импульсного модулятора; Т- длительность импульсов цифрового широтно-импульсного модулятора.
Работу устройства рассмотрим на примере разгона двигателя 5 до заданной частоты вращения ш. (фиг. 2). Импульсы частоты q с выхода генератора 1 поступ ают на первый .вход компаратора 2, где происходит сравнение частот q и z, где f - частота импуль- сов датчика 3. При условии
(1)
сигнал S на инвертирующем выходе компаратора 2 принимает значение логической единицы, в результате чего импульсы генератора 4 через элемент ЗИ-НЕ 11 поступают на суммирующий вход счетчика 7, вызывая увеличение выходного кода А g последнего. В результате описанной процедуры происходят уменьшение скважности импульсов широтно-импульсного модулятора двигателя 5 и разгон, что приводит к нарушению условия (I). Выходной сигнал на неинвертирующем выходе компаратора 2 принимает значение логической единицы, разрешая прохождение импульсов генератора 4 через элемент ЗИ-НЕ 10 на вычитающий вход f счетчика 7, в результате чего Ag уменьшается, двигатель тормозится и частота его вращения W приближается к заданной частоте uj,. С течением времени устройство переходит в
0
установившийся автоколебательный р ежим, причем амплитуда пульсаций частоты вращения двигателя 5 зависит от количества импульсов Z, генерируемых датчиком 3 скорости на один оборот вала двигателя 5, а также от электромеханической и электромагнитной постоянных времени двигателя и амплитуды пульсаций активного .мо.мента нагрузки, приведенного к валу двигателя 5.
Элемент п И-НЕ 9 устраняет переполнение счетчика 7 при д g и S 1 путем блокировки поступления импульсов генератора 4 на суммирующий вход счетчика 7 по третьему входу элемента ЗИ-НЕ 11.
5 Назначение элемента (п-р) ИЛИ 8 заключается в предотвращении уменьшения Ag ниже 2 -I путем блокировки поступления импульсов генератора 4 на вычитающий вход счетчика 7 по первому входу элемента ЗИ-НЕ 10. Тем самым предотвращается уменьшение Д g ниже значений, соответствующих половине зоны нечувствительности двигателя 5 по входному напряжейию, что уменьшает вероятность останова двигателя 5 при резком снижении заданной, частоты
5 вращения scr,. Значение р .может быть найдено как минимальное из всех целых р удовлетворяющих условию
p+Un-log (V,/Vo)(2)
Положительный эффект в устройстве достигается введением постоянного компа0 ратора 2, генератора опорной частоты и элементов ЗИ-НЕ 10 и 11, позволяющих неограниченно наращивать количество импульсов Z, генерируемых частотным датчиком 3 скорости на один оборот вала двигателя 5 без потери устойчивости устройства, что невозможно в известном устройстве. Увеличение количества импульсов Z позволяет уменьшить чистую временную задержку срабатывания частотного компаратора 2, равную периоду сигнала частотного датчика 3
0 скорости, что способствует улучшению динамической точности благодаря повышению частоты и у.м-еньшению амплитуды колебаний частоты врашения двигателя 5. Малое Z, имеющее место в известном устройстве, исходя из требований устойчивости делает невозможным быстрое изменение д g, в результате чего устройство неспособно парировать резкие изменения нагрузочного момента двигателя 5 на низких частотах вращения. Последнее обстоятельство вызывает
0 значительные пульсации частоты вращения вплоть до останова двигателя 5 на малых частотах вращения. Введение в устройство генератора 4 опорной частоты позволяет изменять Age фиксированной скоростью независимо от частоты вращения двигателя 5,
5 что способствует компенсации изменений нагрузочного момента, расширяя тем самым диапазон регулирования по частоте вращения.
5
Формула изобретения
Устройство стабилизации частоты вращения двигателя постоянного тока, содержащее задающий генератор, п-разрядный реверсивный счетчик, выходы которого соединены с входами цифрового широтно-им- пульсного модулятора, подключенного выходом к якорной обмотке двигателя, вал которого механически соединен с частотным датчиком скорости, отличающееся тем, что, с целью повышения динамической точности и расщирения диапазона регулирования частоты вращения двигателя, устройство содержит генератор опорной частоты, частотный компаратор, два элемента ЗИ-НЕ, элемент п И-НЕ и элемент (п-р) ИЛИ, причем выход задающего генератора подключен к первому входу частотного компаратора, вто
ЛПП попп п
рой вход которого соединен с выходом частотного датчика скорости, неинвертирующий выход - с третьим входом первого элемента ЗИ-НЕ, а инвертирующий выход - с первым входом второго элемента ЗИ-НЕ, второй вход последнего подключен к выходу генератора опорной частоты и второму входу первого элемента ЗИ-НЕ, третий вход - к выходу элемента И-НЕ, а выход - к суммирующему входу реверсивного счетчика, вычитающий вход которого соединен с выходом первого элемента ЗИ-НЕ, первый вход последнего подключен к выходу элемента (п-р) ИЛИ, входы которого соединены с выходами старщих (п-р) разрядов реверсивного счетчика и (п-р) входами элемента п И-НЕ, р входов которого подключены к выходам младших р разрядов реверсивного счетчика.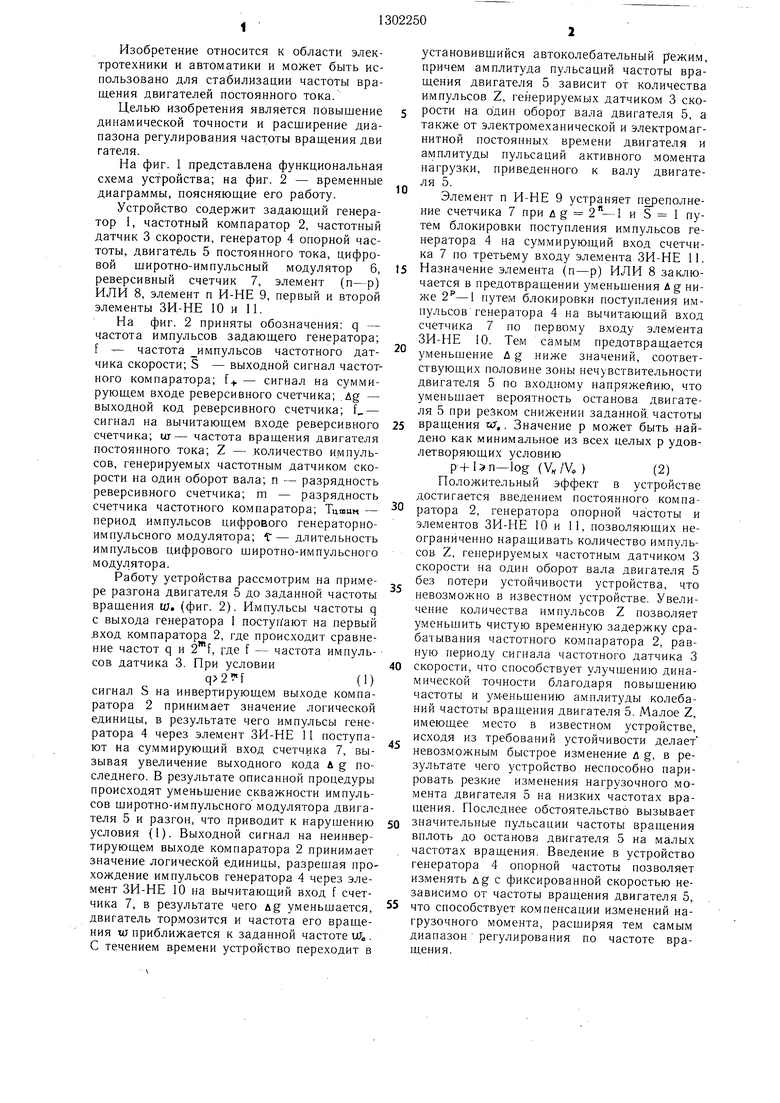
| название | год | авторы | номер документа |
|---|---|---|---|
| Устройство для стабилизации скорости вращения двигателя постоянного тока | 1985 |
|
SU1270746A1 |
| Устройство стабилизации частоты вращения двигателя постоянного тока | 1986 |
|
SU1401437A1 |
| Цифровой электропривод | 1983 |
|
SU1102002A1 |
| ИНФРАКРАСНЫЙ РАДИОМЕТР | 1999 |
|
RU2172476C1 |
| Измеритель переходных характеристик частотных прецизионных устройств | 1987 |
|
SU1620992A1 |
| Частотно-регулируемый электропривод с широтно-импульсной модуляцией | 1979 |
|
SU783940A1 |
| Электропривод постоянного тока | 1982 |
|
SU1045344A1 |
| Преобразователь угла поворота вала в код | 1982 |
|
SU1020845A1 |
| Следящий электропривод с компенсацией люфта | 1985 |
|
SU1273875A1 |
| Устройство для регулирования скорости электропривода | 1986 |
|
SU1322229A1 |
Изобретение относится к области электротехники и автоматики. Целью изобретения является повышение динамической точности и расширение диапазона регулирования частоты вращения двигателя. Указанная цель достигается формированием напряжения двигателя с помош,ью п-разрядного реверсивного счетчика,счетные входы которого соединены через элементы ЗИ-НЕ с генератором опорной частоты. В зависимости от выходного сигнала частотного компаратора, сравнивающего задающую частоту с частотой сигнала частотного датчика скорости, происходит распределение импульсов опорной частоты на суммирующий либо вычитающий вход счетчика. Переполнение счетчика предотвращается с помощью элемента п И-НЕ и элемента (п-р) ИЛИ. Скорость изменения кода счетчика не зависит от частоты вращения двигателя, что способствует расщирению диапазона регулирования при функциях нагрузочного момента. 2 ил. i (Л 00 о го ю СП о
L
ППППППППППППППППППП.
II и II II 11 II II |Г
II II II in
I II II II
II II II in
I II II II
Составитель л. Птенцова
Редактор Л. ГратиллоТехред И. ВересКорректор Г. Решетник
Заказ 947/47Тираж 864Подписное
ВНИИПИ Государственного комитета СССР по изобретений н открытий
113035, Москва, Ж-35, Раушская наб., д. 4/5 Производственно-полиграфическое предприятие, г. Ужгород, ул. Проектная, 4
| Кулесский Р | |||
| А | |||
| и др | |||
| Электроприводы постоянного тока с цифровым управлением | |||
| М.; Энергия, 1973, с | |||
| Способ использования делительного аппарата ровничных (чесальных) машин, предназначенных для мериносовой шерсти, с целью переработки на них грубых шерстей | 1921 |
|
SU18A1 |
| Богорад Г | |||
| Переносная печь для варки пищи и отопления в окопах, походных помещениях и т.п. | 1921 |
|
SU3A1 |
| и др | |||
| Цифровые регуляторы и измерители скорости | |||
| М.-Л.: Энергия, 1966, с | |||
| Бесколесный шариковый ход для железнодорожных вагонов | 1917 |
|
SU97A1 |
