Предлагаемое устройство подобно известным устройствам для автоматической коррекции кинематических систем содержит электрическую -следящую систему, в которой сигнал рассогласования пропорционален величине ошибки лтежду положениями двух валов китгематической системы.
Особенностью предлагаемого устройства является примспение в нем двух индукционных датчиков, снабженных враш,ающимися с од1 наковой скоростью зубчатыми венцами, один из которых совместно с неподвижным зубчатым венцом генерирует опорное напряжение, подаваемое на фазовращатель, установленный на одном из валов, а другой совместно с зубчатым венцом, укрепленным на втором валу, генерирует напряжение, сравниваемое по фазе с выходным напряжением указанного фазовращателя.
Такое выполнение устройства позволяет повысить точ}шсть коррекции.
Зубчатые венцы могут быть вынолнены в виде обычных зубчатых колес с торцовой проточкой «а обращенных друг к другу плоскостях, образующей выступающие части зубцов.
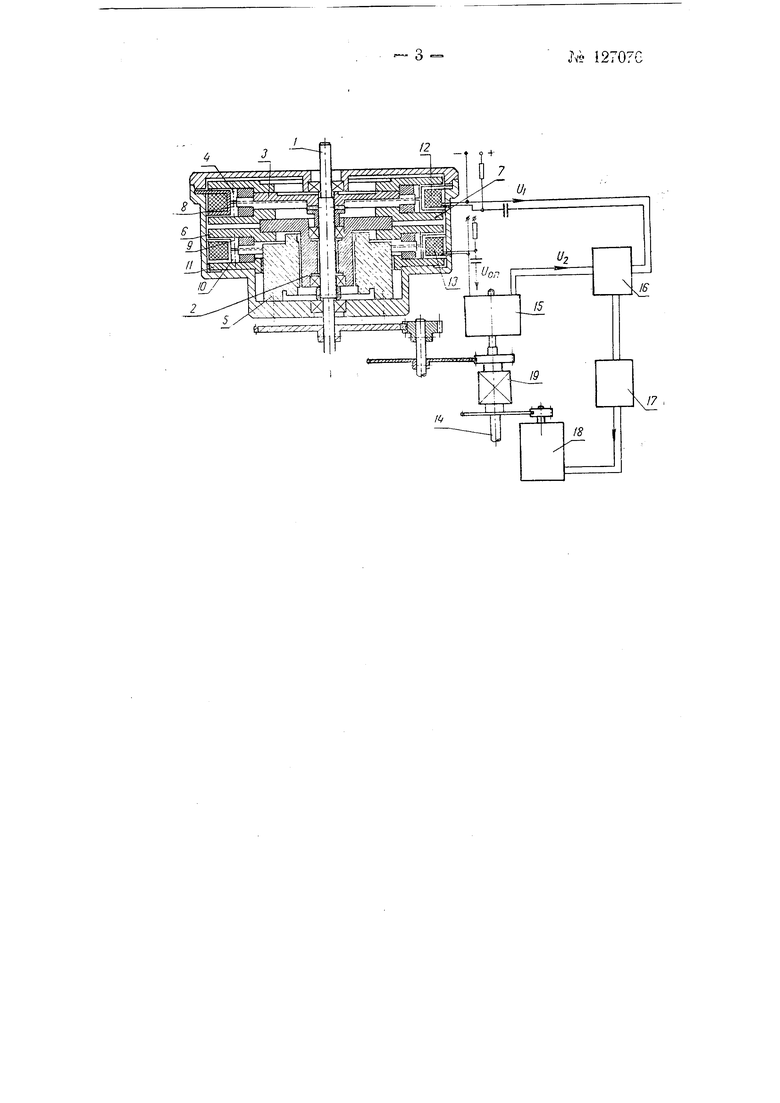
На чертеже изображена схема предлагаемого устройства.
На ведуще.м валу /, жестко связатгпом с ротором 2 электродвигателя, укреплен диск 3 из немагнитного материала с зубчатым венцом 4. Статор 5 двигателя жестко укреплен внутри корпуса устройства. На фланце ротора 2 двигателя укреплены два ярма 5 и 7 с зубчатым и венцами 5 и 5 соответственно. Такой же зубчатый венец 10 и ярмо // укреплены z корпусе неподвижно. Зубчатые венцы 8 и Р, ук)епле)1ные на роторе двигателя совместно с катушками 12 и 13, образуют индукционные датчики.
При вращении ротора двигателя в катушках 12 и 13 возбуждаются напряжени я .f/i и ,(УОЛ , частота которых определяется скоростью вращения ротора2 двигателя и числом Z зубцов на венцах. Фаза напряжения О ) иЗ;Меняется., относительно фазы напряжения Ug (опорного напряжения) - в, зависимости от положения ведущего вала 1. При повороте последнего на угол z (угловой шаг зубцов венца 4) фазовые соотношения напряжений Lj и Uоя восстанавливаются. Таким образом, за один оборот ведущего вала / фаза напряжения U плавно изменяется Z раз в пределах от О до 360° относительно напряжения И„„. Так как фаза возбуждаемых напряжений определяется усредненным положением всех зубцов, то получается точная зависимость фаз напряжений от положения вала 1.
За то же время, т. е. за один оборот ведущего вала /, ведомый вал 14 делает Z оборотов. При этом положение вала 14 передает в масштабе i (где i - передаточное отношение редуктора) положение ведущего вала 1 с ошибкой, обусловленной погрешностями зубчатой передачи между валами. На валу 14 укреплен ротор фазовращателя 15. статорные обмотки которого питаются опорным переменным напряжением и о,,. С ротора фазовращателя У5 снимается «апряжение И, соответствующее положению вала 14. Фаза этого напряжения за один оборот фазовращателя 15 изменяется на 360°, т. е. фазы напряжений Hi и Uz изменяются синхронно, но с некоторым сдвигом, обусловленным в основном погрешностью зубчатой передачи между валами / и 14.
Подавая эти напряжения на фазовый детектор 16, можно снимать с него сигнал, пропорциональный величине рассогласования указанных валов. Этот сигнал подается на усилитель 17, а после усиления - на двигатель 18, поворачиваюший через солнечную шестерню дифференциала 19 вал 14 до точного согласозания с положением вала 1.
Пред мет изобретени я
1. Автоматическое коррекционное устройство для кинематических систем, содержащее электрическую следящую систему, в которой сигнал рассогласования пропорционален величине ошибки между положением двух налов кинематической системы, отличаю шееся тем, что, с целью повышения точности коррекпии, в нем применены два индукционных датчика, снабженных врашаюшимися с одинаковой скоростью зубчатыми венцами, один из которых совместно с неподвижным зубчатым венцом генерирует опорное напряжение, подаваемое на фазовращатель, установленный на одном из валов, а другой совместно с зубчатым венцом, укрепленным на втором валу, генерирует напряжение, сравниваемое по фазе с выходным «апряжением указанного фазоврашателя.
2. Форма выполнения устройства по п. 1, о т л и ч а ю щ а я с я тем, что зубчатые венцы выполнены в виде обычных зубчатых колес с торцовой проточкой на обрашенных друг к другу плоскостях, образуюшей выступающие части зубцов.