Известны устройства для дистанционного измерения угла поворота вала, использующие датчик преобразования измеряемого угла в фазовый сдвиг двух сигналов, содержащие усилители, компенсационный фазовращатель, фазовый детектор для сравнения сигналов и следящий двигатель.
Известные датчики угла, в которых генерируются два сигнала и фазовый сдвиг этих сигналов прямо пропорционален углу измеряемого поворота вала, работают совместно с фазовращателем, который компенсирует фазовый сдвиг сигналов, возникающий в том или ином датчике углов при повороте измеряемого вала. Так как фазовые датчики угла работают как многополюсные, т. е. преобразуют малый угол поворота в сдвиг фазы сигналов на 360°, влияние погрешности компенсационных фазовращателей соответственно уменьшается, но все-таки существенно снижает точность измерений.
Цель изобретения - уменьшить погрешность фазовращателей и повысить точность считывания угла поворота фазового датчика угла. Достигается это применением второго однотипного фазовращателя, подключенного к фазовому детектору, и редуктора для передачи сигнала рассогласования от фазового детектора к фазовращателям через следящий двигатель.
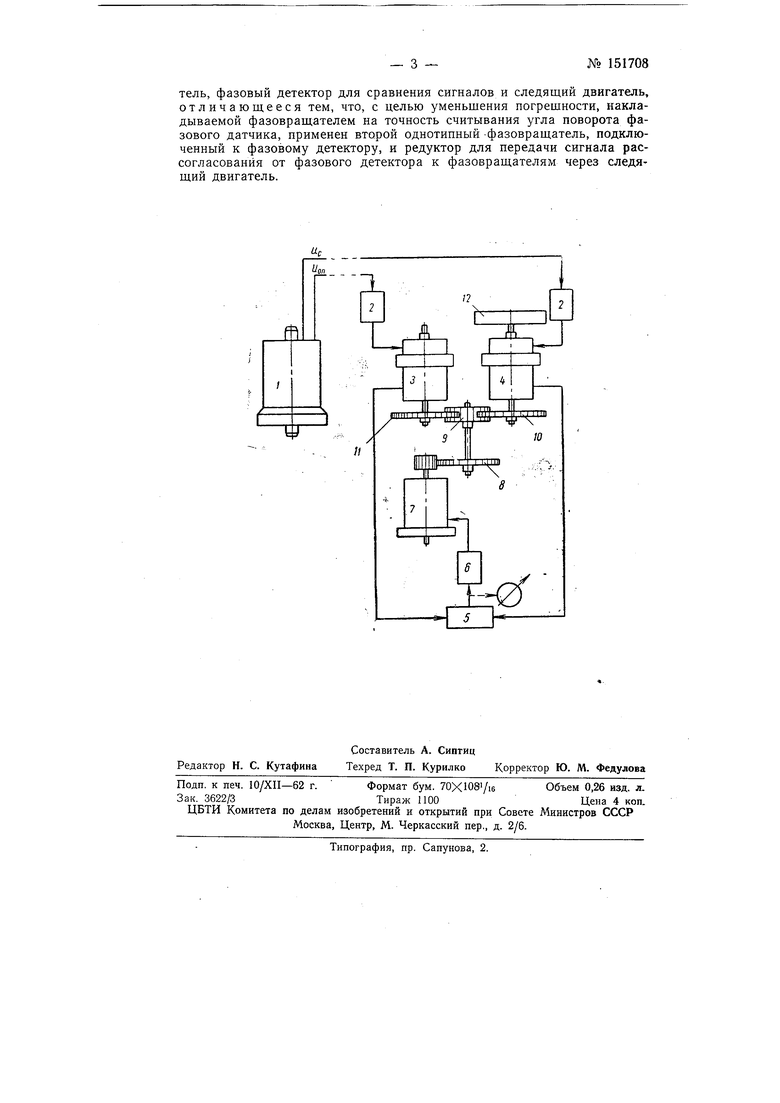
На чертеже показана схема устройства для точного дистанционного измерения угла поворота вала.
Сигналы с датчика 1 углов усиливаются одинаковыми усилителями 2 и подаются на одинаковые компенсационные фазовращатели 3 и
№ 151708- 2 -
4. Сигналы с фазовращателей cpaBHHBaFOTCH на фазовом детекторе 5. Си1 нал, пропорциональный разности фаз, подается на усилитель 6, питающий следящий двигатель 7. Этот двигатель постоянно поворачивает через редуктор 8, 9, JO и 8, 9, 11 фазовращатели 5 и 4 до устранения фазового сдвига сигналов. Передаточное число редуктора 9-10 отличается от передаточного числа редуктора 9-11.
Если расцепить колеса 9 к II редуктора, то компенсация фазового сдвига ф между сигналами V и U „ осуществляется соответствующим поворотом фазовращателя 4. При этом фазовращатель 3 остается неподвижным. Далее фазовращатель 5 включается так, что при вращении в одну сторону с фазовращателем 4 увеличивает или уменьщает сдвиг фазы ф сигналов, возникающий при повороте вала датчика /, и вводит в зацепление колеса 9-// редуктора.
В целях компенсации фазового сдвига поворачивают оба фазовращателя, пока между ними не установится угол поворота Ф, компенсирующий заданный сдвиг фазы сигналов, причем повороту фазовращателя 4 на угол Ф соответствует поворот фазовращателя 3 на угол
где Zjo и Zii - число зубцов колес W и //.
Необходимый для компенсации фазового сдвига взаимный угол поворота фазовращателей равен:
ф ф..,а)
где знак минус соответствует увеличению сдвига фазы ф, а знак минус - уменьщению.
Ф« .(2)
Устройство позволяет устанавливать необходимые для компенсации заданного фазового сдвига различные углы поворота, связанные редуктором компенсационных фазовращателей в зависимости от отнощения:«
Предлагаемая схема позволяет более выгодно использовать фазовращатели при цене оборота в 10 раз меньщей, чем при компенсации одним фазовращателем. Ощибка измерения, обусловленная погрещностями фазовращателя при отсчете угла по щкале 12, будет уменьщена в 10 раз. Дополнительная ощибка, вносимая редуктором 9-10-//, сама по себе малая по сравнению с ощибками фазовращателя, также уменьщается в 10 раз.
Для системы с больщим масщтабом преобразования угла в датчике / можно выгодно использовать фазовращатели по уменьщению сдвига фа|зы ф.
Предмет изобретения
Устройство для дистанционного измерения угла поворота вала, использующее датчик преобразования измеряемого угла в сдвиг фазы двух сигналов, содержащее усилители, компенсационный фазовраща ф
Z к 11
11 -г
-F Zm
тель, фазовый детектор для сравнения сигналов и следящий двигатель, отличающееся тем, что, с целью уменьщения погрещности, накладываемой фазовращателем на точность считывания угла поворота фазового датчика, применен второй однотипный -фазовращатель, подключеиный к фазовому детектору, и редуктор для передачи сигнала рассогласования от фазового детектора к фазовращателям через следящий двигатель.
| название | год | авторы | номер документа |
|---|---|---|---|
| Автоматическое коррекционное устройство для кинематических систем | 1958 |
|
SU127076A1 |
| Оптический преобразователь угла поворота вала в электрический сигнал | 1961 |
|
SU150385A1 |
| Устройство для дистанционной передачи угла поворота вала | 1961 |
|
SU147109A1 |
| Фотоэлектрический датчик | 1957 |
|
SU118539A1 |
| УСТРОЙСТВО для ИЗМЕРЕНИЯ УГЛА ПОВОРОТА ВАЛА С ФАЗОВОЙ СИНХРОНИЗАЦИЕЙ | 1964 |
|
SU164542A1 |
| Устройство для передачи на расстояние угловых перемещений | 1961 |
|
SU145847A1 |
| Преобразователь угла поворота вала в код | 1977 |
|
SU660072A1 |
| Следящий привод для компенсации ки-НЕМАТичЕСКиХ пОгРЕшНОСТЕй МЕХАНизМОВ | 1979 |
|
SU817959A1 |
| Фазовая следящая система | 1974 |
|
SU552587A1 |
| Устройство для автоматической коррекции угловой погрешности передач в кинематических системах | 1960 |
|
SU141913A1 |
:J
