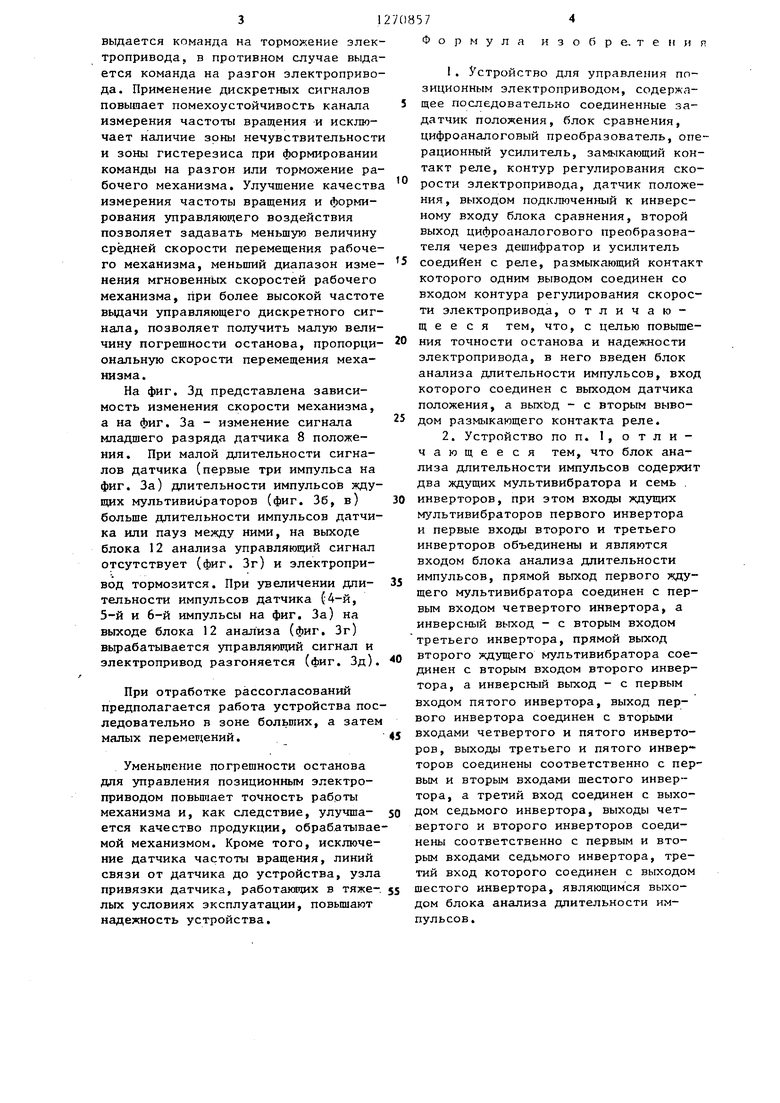
Изобретение относится к электротехнике и может быть использовано в отрасли промьшшенности, где применяются следующие или позиционные электроприводы с точной остановкой механизма в заданной точке, Цель изобретения - повышение точности останова и надежности электропривода . На фиг„- 1 приведена структурная .схема предлагаемого устройства для управления позиционным электроприводом; на фиг. 2 - принципиальная электрическая схема блока анализа длительности импульсов; на фиг. 3 а - частота следования сигналов младшего разряда датчика положения; б - эталонные импульсы, формируемые ждущим мультивибратором 13 по переднему .фронту сигнала младшего разряда датчика положения; в - эталонные импульсы, формируемые ждущим мультивибратором по заднему фронту сигнала младшего разряда датчика положения; г - выходной сигнал блока; д - скорость перемещения рабочего механизма Устройство для управления позиционным электроприводом содержит (фиг. последовательно соединенные задатчик 1 положения, блок 2 сравнения, цифроаналоговый преобразователь 3, операционный усилитель 4, замыкающий контакт 5 реле 6, контур 7 регулирования скорости электропривода, датчик 8 положения, выходом подключенный к инверсному входу блока 2 сравнения, второй выход цифроаналогового преобразователя 3 через дешифратор 9 и усилитель 10 соединен с реле 6, размыкающий контакт 11 которого одним выводом соединен с входом контура 7 регулирования скорости электропривода, блок 12 анализа длительности импульсов, вход которого соедине с выходом датчика положения 8, а вы ход - с вторым выводом размыкаюш,его контакта 11 реле 6. Влок 12 анализа длительности импульсов содержит (фиг, 2) ждущие мультивибраторы 13 и 14 и инверторы 15 -21, Входы ждущих мультивибрато ров 13 и 14, инвертора 15 и первые входы инверторов 16 и 17 объединены и являются входом блока 12 анализа длительности импульсов. Прямой выхо ждущего мультивибратора 13 соединен с первым входом инвертора 18, а инверсный выход - с вторым входом ин72вертора 17 , Прямой выход ждущего мультивибратора 14 соединен с вторым входом инвертора 16, а инверсный выход - с первым входом инвертора 19. Выход инвертора 15 соединен с вторыми входами инверторов 18 и 19, Выходы инверторов 17 и 19 соединены соответственно с первым и вторым входами инвертора 20, а третий вход соединен с выходом инвертора 21, Вы- ходы инверторов 18 и 16 соединены соответственно с первым и вторым входами инвертора 21, третий вход которого соединен с выходом инвертора 20, являющимся выходом блока 12 анализа длительности импульсов. Операционный усилитель 4 имеет параболическую выходную характеристику. Ждущий мультивибратор 13 срабатывает по переднему фронту входного импульса, а ждущий мультивибратор 14 срабатывает по заднему фронту входного импульса. Устройство работает следующим образом. При работе устройства в зоне больших рассогласований при переключении реле 6 цепь управления содержит блок сравнения с подключенными к его входам задатчиком 1 и датчиком 8 положения, цифроаналоговый преобразователь 3, операционный усилитель 4, замыкающий контакт 5 реле 6 и контур 7, Устройство работает как система подчиненного регулирования положения с цифровым контуром регулирования положения по параболической характеристике. Сигнал, пропорциональный рассогласованию по положению, на выходе операционного усилителя 4 с параболической характеристикой, преобразуется в задание на скорость, которое отрабатывается контуром 7, По мере отработки рабочим механизмом рассог-ласования, вблизи точки останова, реле 6 отключается, его размыкающий контакт 11 замыкается, Цепь управления при этом содержит контур 7, датчик положения 8 и блок 12 анализа длительности импульсов, в котором осуществляется сравнение длительности импульса младшего разряда датчика положения или длительности паузы между импульсами с эталонной длительностью. Если длительность импульса датчика или паузы между импульсами менее эталонной, выдается команда на торможение элек тропривода, в противном случае выда ется команда на разгон электроприво да. Применение дискретных сигналов повышает помехоустойчивость канала измерения частоты вращения и исключает наличие зоны нечувствительност и зоны гистерезиса при формировании команды на разгон или торможение рабочего механизма. Улучшение качеств измерения частоты вращения и формирования управляющего воздействия позволяет задавать меньшую величину средней скорости перемещения рабочего механизма, меньший диапазон изменения мгновенных скоростей рабочего механизма, при более высокой частоте выдачи управляющего дискретного сигнала, позволяет получить малую величину погрешности останова, пропорциональную скорости перемещения механизма. На фиг. Зд представлена зависимость изменения скорости механизма, а на фиг. За - изменение сигнала младшего разряда датчика 8 положения. При малой длительности сигналов датчика (первые три импульса на фиг. За) длительности импульсов ждущих мультивибраторов (фиг. 36, в) больше длительности импульсов датчика или пауз между ними, на выходе блока 12 анализа управляющий сигнал отсутствует (фиг. Зг) и электропривод тормозится. При увеличении дпительности импульсов датчика (Ч-й, 5-й и 6-й импульсы на фиг. За) на выходе блока 12 анализа (фиг, Зг) вьфабатывается управляющий сигнал и электропривод разгоняется (фиг. Зд). При отработке рассогласований предполагается работа устройства пос ледовательно в зоне больших, а затем малых перемещений. Уменьше1ше погрешности останова для управления позиционным электроприводом повышает точность работы механизма и, как следствие, улучшается качество продукции, обрабатывае мой механизмом. Кроме того, исключение датчика частоты вращения, линий связи от датчика до устройства, узла привязки датчика, работающих в тяжелых условиях эксплуатации, повьш1ают надежность устройства. Формула изобре, тепля 1. Устройство для управления позиционным электроприводом, содержащее последовательно соединенные задатчик положения, блок сравнения, цифроаналоговый преобразователь, операционный усилитель, замыкающий контакт реле, контур регулирования скорости электропривода, датчик положения , выходом подключенный к инверсному входу блока сравнения, второй выход цифроаналогового преобразователя через дешифратор и усилитель соедийен с реле, размыкающий контакт которого одним выводом соединен со входом контура регулирования скорости электропривода, отличающееся тем, что, с целью повышения точности останова и надежности электропривода, в него введен блок анализа длительности импульсов, вход которого соединен с выходом датчика положения, а выход - с вторым выводом размыкающего контакта реле. 2. Устройство по п. 1, отличающееся тем, что блок анализа длительности импульсов содержит два ждущих мультивибратора и семь . инверторов, при этом входы ждущих мультивибраторов первого инвертора и первые входы второго и третьего инверторов объединены и являются входом блока анализа длительности импульсов, прямой выход первого ждущего мультивибратора соединен с первым входом четвертого инвертора, а инверсный выход - с вторым входом третьего инвертора, прямой выход второго ждущего мультивибратора соединен с вторым входом второго инвертора, а инверсный выход - с первым входом пятого инвертора, выход первого инвертора соединен с вторыми входами четвертого и пятого инверторов, выходы третьего и пятого инверторов соединены соответственно с первым и вторым входами шестого инвертора, а третий вход соединен с выходом седьмого инвертора, выходы четвертого и второго инверторов соединены соответственно с первым и вторым входами седьмого инвертора, третий вход которого соединен с выходом шестого инвертора, являющимся выходом блока анализа длительности импульсов.
й/г,г
| название | год | авторы | номер документа |
|---|---|---|---|
| Устройство для управления электродвигателем позиционного электропривода | 1985 |
|
SU1307523A1 |
| Позиционный электропривод | 1990 |
|
SU1778904A1 |
| УСТРОЙСТВО ДЛЯ УПРАВЛЕНИЯ ШАГОВЫМ ДВИГАТЕЛЕМ | 1997 |
|
RU2125762C1 |
| УСТРОЙСТВО ДЛЯ АВТОМАТИЧЕСКОЙ БАЛАНСИРОВКИ РЕЗОНАТОРА ТВЕРДОТЕЛЬНОГО ВОЛНОВОГО ГИРОСКОПА ЛУЧОМ ЛАЗЕРА | 1993 |
|
RU2079107C1 |
| Система позиционного управления | 1985 |
|
SU1247832A1 |
| Устройство для приведения в действие трамвайной стрелки с поезда | 2002 |
|
RU2224675C2 |
| УСТРОЙСТВО ДЛЯ ПРИВЕДЕНИЯ В ДЕЙСТВИЕ ТРАМВАЙНОЙ СТРЕЛКИ С ПОЕЗДА | 2001 |
|
RU2191715C1 |
| Преобразователь отклонения частоты от номинального значения в аналоговый сигнал | 1990 |
|
SU1748082A1 |
| Устройство для управления биоэлектрическими протезами | 1985 |
|
SU1333331A1 |
| Устройство магнитной записи | 1983 |
|
SU1078466A1 |
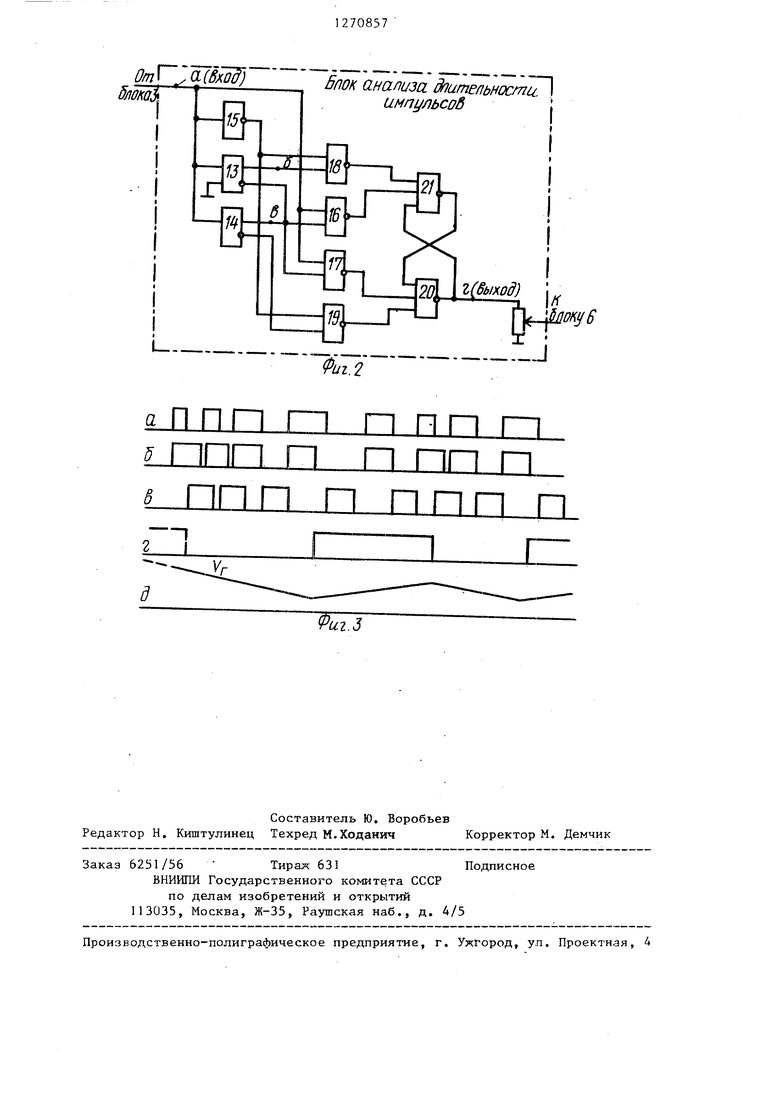
Изобретение относится к электротехнике и может быть использовано в следящих или позиционных электроприводах с точной остановкой меха.низма. Повьшение точности останова и надежности электропривода обеспечивается за счет введения блока анализа 12 длительности импульсов, связанного с датчиком положения 8. При малой длительности сигналов датчика положения 8 длительности импульсов ждущих мультивибраторов больше длительности импульсов датчика или пауз между ними, на выходе блока анализа 12 управляющий сигнал отсутствует и электропривод тормозится, При увеличении длительности импульса датчика положения 8 на выходе блока анали- . за 12 вырабатывается управляющий сигнал и электропривод разгоняется. Введение блока 12 позволяют повысить точность измерения частоты вращения, исключить зону нечувствительности и (Л зону гистерезиса при формировании переходных процессов пуска и торможения электропривода, I з.п. ф-лы. 3 ил. го vi о с ел 
g П ПП I I П n f
5 nnn П П ПП П
ё ПП П П П П П П
| Позиционный электропривод постоянного тока | 1981 |
|
SU1072223A1 |
| Аппарат для очищения воды при помощи химических реактивов | 1917 |
|
SU2A1 |
| Устройство для управления позиционным электроприводом | 1981 |
|
SU1053249A1 |
| Аппарат для очищения воды при помощи химических реактивов | 1917 |
|
SU2A1 |
