(П
с

| название | год | авторы | номер документа |
|---|---|---|---|
| Устройство для установки и стабилизации фазового положения блока вращающихся головок | 1986 |
|
SU1515195A1 |
| Стабилизированный вентильный электропривод с комбинированным управлением | 1987 |
|
SU1610588A1 |
| Устройство для управления скоростью перемещения носителя информации | 1985 |
|
SU1278961A2 |
| Синхронизируемый вентильный электродвигатель | 1985 |
|
SU1317581A1 |
| Синхронизированный вентильный электродвигатель | 1984 |
|
SU1251279A1 |
| Электропривод переменного тока | 1986 |
|
SU1378004A1 |
| Устройство для управления скоростью перемещения носителя информации | 1984 |
|
SU1170501A1 |
| Позиционный электропривод | 1984 |
|
SU1270859A1 |
| Электропривод постоянного тока | 1986 |
|
SU1661951A1 |
| Устройство управления - фазным бесконтактным двигателем постоянного тока | 1978 |
|
SU782070A1 |
Изобретение относится к электротехнике, а именно к автоматизированным электроприводам, и может быть использовано в прецизионных и следящих электроприводах. Целью изобретения является улучшение качества переходного процесса путем уменьшения времени втягивания в синхронизм бесконтактного двигателя со стабилизацией скорости. С этой целью в стабилизированный бесконтактный двигатель введены дополнительный триггер 6, делитель частоты 9, частотный компаратор 15, элемент И 12, счетчик импульсов 1 и мультиплексор 14, позволяющие обеспечить более плавное втягивание в синхронизм синхронной машины 3 и тем самым улучшить качество переходного процесса при ее запуске. 1 ил.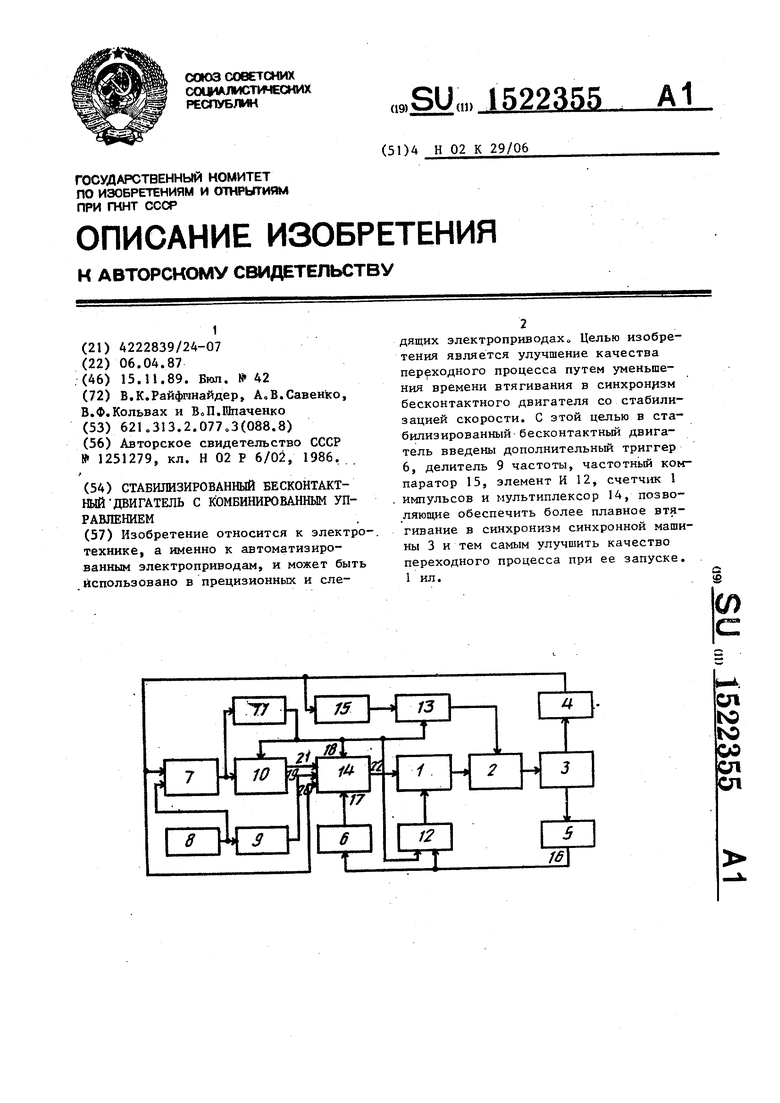
ел
ts5
оэ сд
ел
3
Изобретение относится к электротехнике, а именно к автоматизированным электроприводам, и может быть ипользовано в прецизионных и следящих электроприводах.
Цель изобретения - улучшение качества переходного процесса путем уменьшения времени втягивания двигателя в синхронизм.
На чертеже представлена функциональная блок-схема предлагаемого стабилизированного бесконтактного двигателя с комбинированным управлением
Устройство содержит счетчик 1 импульсов, соединенный выходами с управляющими входами коммутатора 2, соединенного выходом со статорной
обмоткой синхронной машинь 3, связан- 20 теля 3 начинает поворачиваться до
ной кинематически с датчиком 4 частоты вращения и с датчиком 5 положения ротора Выход последнего датчика соединен с входом дополнительного триггера 6 Выход датчика 4 частоты вращения соединен с первым входом фазового дискриминатора 7, соединенного вторым входом с выходом генератора 8 опорной частоты и с входом делителя 9 частоты. Выход фазового дискриминатора 7 соединен с первым входом корректирующего узла 10 и с входом триггера 11 управления, выход которого соединен с вторым входом корректирующего узла 10, с первым входом элемента И 12 и с первым вхо- дом формирователя 13, соединенного выходом с дополнительным входом ком- мутатора 2. Выход датчика 5 положения ротора соединен с вторым входом эле- мента И 12, соединенного выходом с установочным входом счетчика 1 импульсов, счетным входом соединенного с выходом мультиплексора 14, первый, второй и третий информационные входы которого соединены с выходами соответственно делителя 9 частоты, датчика 4 частоты вращения и корректирующего узла 10. Первый и второй адресные входы мультиплексора 14 соединены с выходами соответственно дополнительного триггера 6 и триггера 11 управления с Выход датчика 4 частоты вращения через частотный компаратор 15 соединен с вторым входом формирова- ,теля 13.
Устройство работает следующим образом.
При пуске синхронной машины 3 на счетньй вход счетчика 1 импульсов через мультиплексор 14 подаются импульсы с выхода делителя 9 частоты (фиг,2, где для наглядности начальный этап пуска показан в увеличенном масштабе, а импульсы.с выхода корректирующего узла 10 соотйетствуют нулевой фазовой ошибке). При
этом дополнительньм триггер 6 и триггер 11 управления находятся в нулевом состоянии и на обоих адресных входах мультиплексора 14 присутствуют логические нули В этом случае сигналы управления коммутатором 2 формируются счетчиком 1 импульсов с частотой несколько ниже частоты приемистости двигателя 3. Ротор двига
0
момента появления импульса на выходе датчика 5 Передний фронт этого им- пульса напряжения соответствует мо- менту включения первой фазы обмотки синхронной машины 3. Импульс напряжения с датчика 5 положения ротора переключает дополнительный триггер 6 в единичное состояние и устанавливает счетчик 1 импульсов в начальное состояние При этом включается первая фаза обмотки двигателя 3, на сч.етный вход счетчика 1 импульсов через мультиплексор 14 подаются импульсы напряжения с импульсного датчика
5 4 частоты вращения, частота которых повьппается по мере разгона двигателя 3. Соответственно этому повышается частота переключения фаз обмотки двигателя 3. Двигатель разго-- няется по своей естественной характеристике до момента, когда частот- ньй компаратор 15 определяет, что частота вращения двигателя 3 больше допустимой, определяемой величиной предельного скольжения полей ротора и статора, при котором двигатель 3 еще может втянуться в синхронизм при переводе его на режим синхронного двигателя При этом (фиг„3) на дополнительный вход коммутатора 2 по- . ступают импульсы с выхода формирователя 13 В течение паузы этих импульсов двигатель разгоняется, а в течение импульсов тормозится„ Таким образом обеспечивается грубая (релей- ная стабилизация частоты вращения двигателя 3. Это необходимо для обеспечения плавности перевода двига0
5
0
теля 3 в синхронный режим при изменении напряжения пиfaния коммутатора 2, момента сопротивления на валу двигателя 3, температуры окружающей среды. Это продолжается до момента, пока фазы частот опорного генератора 8 и датчика 4 частоты вращения не совпадают. Тогда импульс с фазового дискриминатора 7 переключает триггер П. управления в единичное состояние По сигналу с триггера 11 управления блокируется прохождение импульсов с датчика-5 через элемент И 12 на установочный вход счетчика 1 импульсов и разрешается прохождение импульсов с фазового дискриминатора 7 на вход корректирующего узла 10, На счетный вход счетчика I импульсов через мультиплексор 14 поступают пульсы с выхода корректирующего узла 10, двигатель 3 переводится из режим бесконтактного двигателя постоянного тока в синхронный режим со стабилизацией частоты и фазы вращения двига теля 3 уже известным фазовым способом.
Таким образдм, путем уменьшения скорости при подходе к синхронной удется обеспечить плавность перевода двигателя в синхронньш режим и тем самым уменьшить время втягивания в . синхронизм.
формула изобретения
Стабилизированный бесконтактньш двигатель с комбинированным управлением, содержащий синхронную машину статорные обмотки которой соединены с выходом коммутатора, генератор опоной частоты, фазовый дискриминатор, вькодом соединенньй с первым входом корректирующего узла, триггер управления, формирователь, датчик положа- ния ротора, кинематически связанный
с ротором синхронной машины, отличающийся-, тем, что, с целью улучшения качества переходного процеса путем уменьшения времени вхождения двигателя в синхронизм, он снабжен дополнительным триггером, датчиком частоты вращения, частотным компаратором, делителем частоты, элементом И, счетчиком импульсов и мультиплексором, первьй, второй и третий информационные входы которого соединены с выходами соответственно делителя частоты, датчика частоты вращё- корректирующего узла, первый и второй адресные входы мультиплексора соединены с выходами соответственно дополнительного триггера и триггера управления, выход последнего соедине с первым входом элемента И, с первым входом формирователя и с вторым входом корректирующего узла, первым входом соединенного с входом триггера управления, выход мультиплексора соединен со счетным входом счетчика импульсов, установочный вход которого соединен с выходом элемента И, второ вход которого соединен с входом дополнительного триггера и с выходом датчика положения ротора, выход датчка частоты вращения соединен с первым входом фазового дискриминатора и через, частотный компаратор с вторым входом формирователя, выходом соединенного с дополнительным входом коммутатора, управляющие входы которого соединены с выходами разрядов счетчика импульсов, выход генератора опорной частоты соединен с вторым входом фазового дискриминатора и с входом делителя частоты, датчик частоты вращения кинематически связан с синхронной машиной, а датчик положения ротора фиксирует одно опреде- ленное положение ротора синхронной машины.
| Синхронизированный вентильный электродвигатель | 1984 |
|
SU1251279A1 |
| Аппарат для очищения воды при помощи химических реактивов | 1917 |
|
SU2A1 |
| f | |||
