ми 11 и 12 моментов упругих сил (МУС) на валу каждого двигателя 4 и 5. При подаче с командоаппарата 13 на регулятор 1 скорости двигатели iA и 5 начинают разгоняться. Отрицательная обратная связь по току осуществляется положительным сигналом с датчика 6 тока, поступающим на регулятор 2 тока. Отрицательная обратная связь по скорости осуществляется отрицательным сигналом с датчика 7 ЭДС привода, пос-Гупающим на регулято 1 скорости. При разгоне двигателей
4 и 5 поворота в ВП 8 и 9 возникают МУС. Сигналы с датчиков 11 и 12, пропорциональные производным соответственно МУС в каждом ВП8 и 9, через диоды и дифференцирующие усилители 22-25 поступают на регулятор 2. Эти гибкие отрицательные обратные связи по динамическим нагрузкам действуют только в период нарастания каждого из МУС и обеспечивают требуемое ограничение и демпфирование динамических нагрузок в режимах реверса и торможения привода поворота. 3 ил.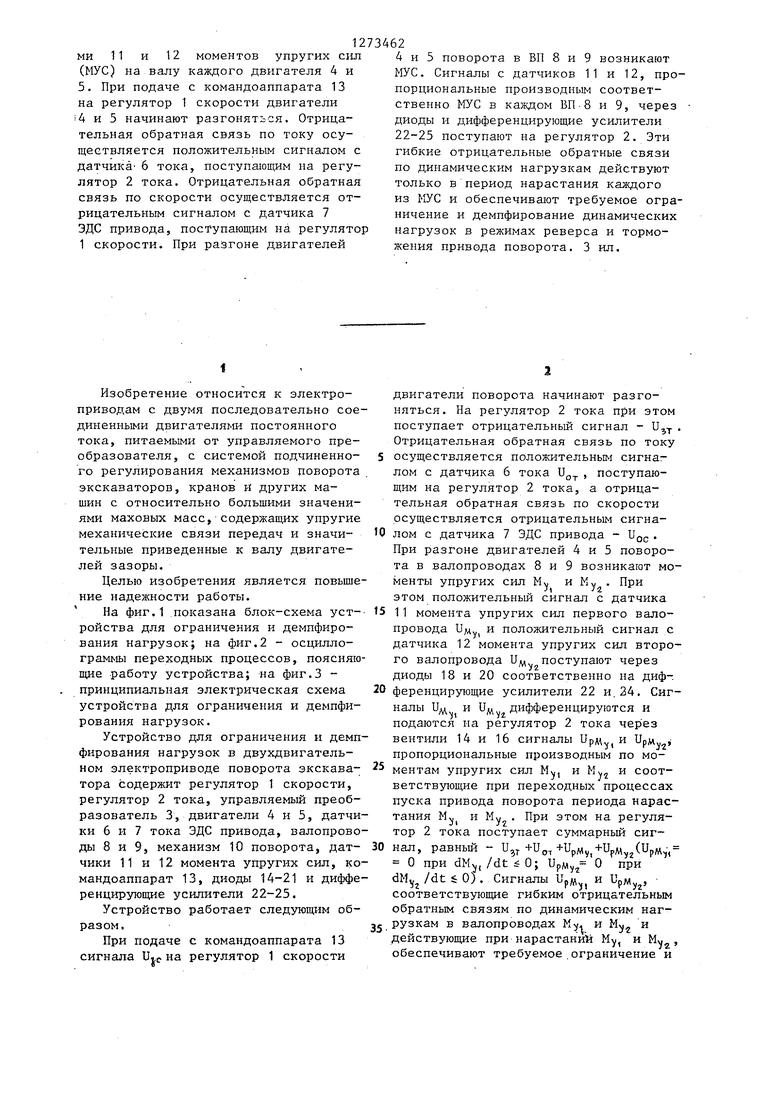
| название | год | авторы | номер документа |
|---|---|---|---|
| Устройство для управления электроприводом одноковшового экскаватора | 1979 |
|
SU926181A1 |
| Система автоматического управления бурового механизма | 1986 |
|
SU1332004A1 |
| Устройство управления процессом выбора зазоров в многодвигательных электроприводах поворотных механизмов экскаваторов | 1981 |
|
SU1015053A1 |
| Устройство защиты стрелы экскаваторадраглайна от растяжки | 1977 |
|
SU737576A1 |
| Устройство управления процессом выбора зазоров в поворотных механизмах экскаваторов | 1978 |
|
SU785438A1 |
| Устройство для ограничения динамических усилий механизмов экскаватора | 1990 |
|
SU1788161A1 |
| Система автоматического управления бурового механизма | 1989 |
|
SU1716111A1 |
| Многодвигательный электропривод | 1985 |
|
SU1410264A1 |
| Устройство для ограничения динамических нагрузок копающих механизмов экскаватора | 1990 |
|
SU1740571A1 |
| Способ управления электроприводом одноковшового экскаватора и устройство для его осуществления | 1988 |
|
SU1629423A1 |
Изобретение относится к области горнорудной промышленности и может быть использовано на одноковшовых экскаваторах. Устройство позволяет повысить надежность работы за счет ограничения и демпфирования динамических нагрузок, возникающих в упругих связях валопроводов (ВП) 8 и 9 механизма поворота 10, в сочленении стрелы и платформы. Для этого устройство снабжено восемью диодами 14с S 21, четырьмя дифференцирующими усилителями 22-25 и двумя датчика(Л
Изобретение относится к электроприводам с двумя последовательно соединенными двигателями постоянного тока, питаемьми от управляемого преобразователя, с системой подчиненного регулирования механизмов поворота экскаваторов, кранов и других машин с относительно большими значениями маховых масс, содержащих упругие механические связи передач и значительные приведенные к валу двигателей зазоры.
Целью изобретения является повышение надежности работы.
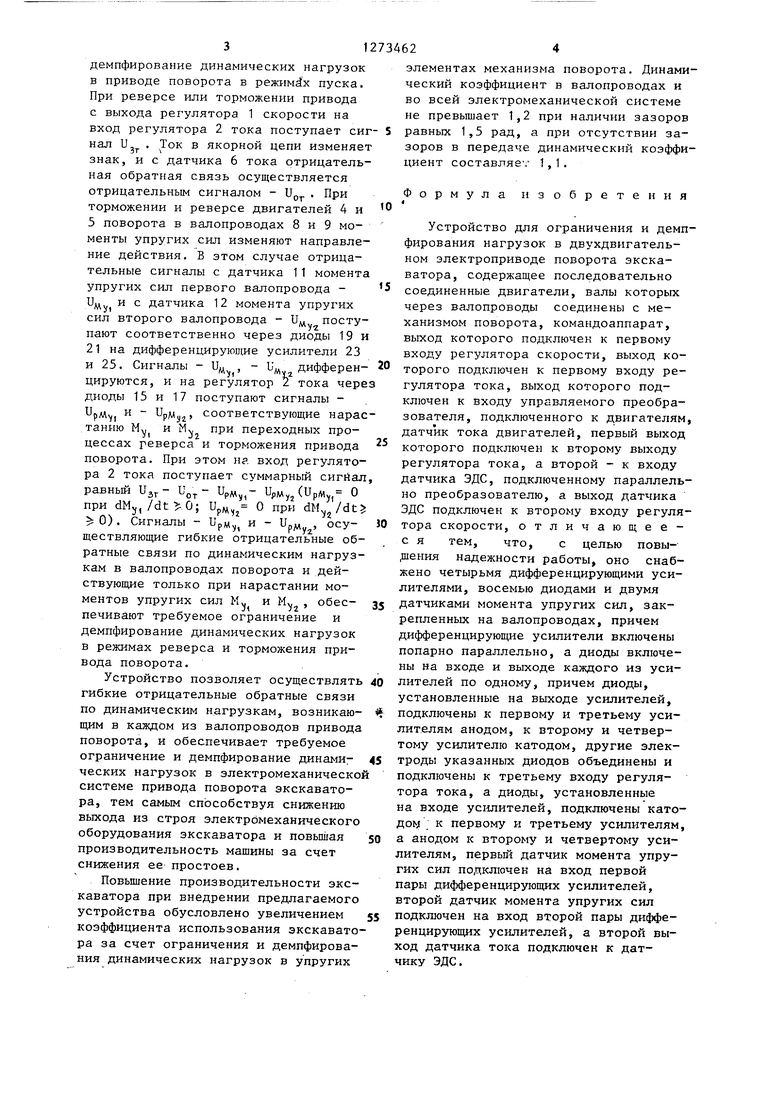
На фиг.1 показана блок-схема устройства для ограничения и демпфирования нагрузок; на фиг.2 - осциллограммы переходных процессов, поясняющие работу устройства; на фиг.З принципиальная электрическая схема устройства для ограничения и демпфирования нагрузок.
Устройство для ограничения и демпфирования нагрузок в двухдвигательном электроприводе поворота экскаватора содержит регулятор 1 скорости, регулятор 2 тока, управляемый преобразователь 3, двигатели 4 и 5, датчики 6 и 7 тока ЭДС привода, валопроводы 8 и 9, механизм 10 поворота, датчики 11 и 12 момента упругих сил, командоаппарат 13, диоды 14-21 и дифференцирующие усилители 22-25.
Устройство работает следующим образом.
При подаче с командоаппарата 13 сигнала Ujc на регулятор 1 скорости
двигатели поворота начинают разгоняться. На регулятор 2 тока при этом поступает отрицательный сигнал - . Отрицательная обратная связь по току
5 осуществляется положительным сигналом с датчика б тока U, поступающим на регулятор 2 тока, а отрицательная обратная связь по скорости осуществляется отрицательным сигна0 лом с датчика 7 ЭДС привода - UQ. При разгоне двигателей 4 и 5 поворота в валопроводах 8 и 9 возникают моменты упругих сил Mv и My . При этом положительный сигнал с датчика
5 11 момента упругих сил первого валопровода Уд и положительный сигнал с датчика 12 момента упругих сил второго валопровода V/ поступают через диоды 18 и 20 соответственно на диф-.
20 ференцирующие усилители 22 и,24. Сигналы и дифференцируются и подаются на регулятор 2 тока через
вентили 14 и 16 сигналы Upj и ирд ,
и и пропорциональные производным по моментам упругих сил My, и М и соответствующие при переходных процессах пуска привода поворота периода нарастания M,j и My . При этом на регулятор 2 тока поступает суммарный сих-
нал, равньш - U,+0 +UpMy,+UpM,,-, О при dMx,/dtiO; UpMy О при dM,, /dt 0) . Сигналы UpM,,, и UpMy, соответствующие гибким отрицательным обратным связям по динамическим нагРУзкам в валопроводах My. и М,у и действующие при нарастаний My, и М,. , обеспечивают требуемое.ограничение и демпфирование динамических нагрузок в приводе поворота в режимах пуска. При реверсе или торможении привода с выхода регулятора 1 скорости на вход регулятора 2 тока поступает сиг нал и . Ток в якорной цепи изменяет знак, и с датчика 6 тока отрицательная обратная связь осуществляется отрицательным сигналом - U . При торможении и реверсе двигателей 4 и 5 поворота в валопроводах 8 и 9 моменты упругих сил изменяют направление действия, В этом случае отрицательные сигналы с датчика 11 момента упругих сил первого валопровода Uj и с датчика 12 момента упругих сил второго валопровода - U поступают соответственно через диоды 19 и 21 на дифференцирующие усилители 23 и 25. Сигналы - и, , - и дифферен2цируются, и на регулятор z тока чере диоды 15 и 17 поступают сигналы и„Ал,.. и - Up/y,, соответствующие нарас JpMv, и и MV. при переходных протанию Мч У. цессах реверса и торможения привода поворота. При этом нй вход регулятора 2 тока поступает суммарный сигйал равный изт- ог UpMy,- UpMyj(UpMy, О при dMv,, Up,J О при 0). Сигналы - UpM,,, и - UpMy осуществляющие гибкие отрицательные обратные связи по динамическим нагрузкам в валопроводах поворота и действующие только при нарастании моментов упругих сил Ц и Му , обеспечивают требуемое ограничение и демпфирование динамических нагрузок в режимах реверса и торможения привода поворота. Устройство позволяет осуществлять гибкие отрицательные обратные связи по динамическим нагрузкам, возникающим в каждом из валопроводов привода поворота, и обеспечивает требуемое ограничение и демпфирование динамических нагрузок в электромеханическо системе привода поворота экскаватора, тем самым способствуя снижению выхода из строя электромеханического оборудования экскаватора и повышая производительность мащины за счет снижения ее простоев. Повышение производительности экскаватора при внедрении предлагаемого устройства обусловлено увеличением коэффициента использования экскавато ра за счет ограничения и демпфирования динамических нагрузок в упругих элементах механизма поворота. Динамический коэффициент в валопроводах и во всей электромеханической системе не превышает 1,2 при наличии зазоров равных 1,5 рад, а при отсутствии зазоров в передаче динамический коэффициент составляет 1,1. Формула изобретения Устройство для ограничения и демпфирования нагрузок в двухдвигательном электроприводе поворота экскаватора, содержащее последовательно соединенные двигатели, валы которых через валопроводы соединены с механизмом поворота, командоаппарат, выход которого подключен к первому входу регулятора скорости, выход кок первому входу реторого подключен гулятора тока, выход которого подключен к входу управляемого преобразователя, подключенного к двигателям, датчик тока двигателей, первый выход которого подключен к второму выходу регулятора тока, а второй - к входу датчика ЭДС, подключенному параллельно преобразователю, а выход датчика ЭДС подключен к второму входу регулятора скорости, отличающеес я тем, что, целью повы;иения надежности работы, оно снабжено четырьмя дифференцирующими усилителями, восемью диодами и двумя датчиками момента упругих сил, закрепленных на валопроводах, причем дифференцирующие усилители включены попарно параллельно, а диоды включены на входе и выходе каждого из усилителей по одному, причем диоды, установленные на выходе усилителей, подключены к первому и третьему усилителям анодом, к второму и четвертому усилителю катодом, другие электроды указанных диодов объединены и подключены к третьему входу регулятора тока, а диоды, установленные на входе усилителей, подключены катодом ; к первому и третьему усилителям, а анодом к второму и четвертому усилителям, первьш датчик момента упругих сил подключен на вход первой пары дифференцирующих усилителей, второй датчик момента упругих сил подключен на вход второй пары дифференцирующих усилителей, а второй выход датчика тока подключен к датчику ЭДС.
чхгrv--)-
рпуг А
ивПи,
| Устройство управления процессом выбора зазоров в многодвигательных электроприводах поворотных механизмов экскаваторов | 1981 |
|
SU1015053A1 |
| Аппарат для очищения воды при помощи химических реактивов | 1917 |
|
SU2A1 |
| Переелегин Н.Г | |||
| и др | |||
| Динамика тиристорного электропривода механизма поворота одноковшового экскаватора.Электротехническая промьппленность | |||
| Сер | |||
| Электропривод, вып | |||
| Аппарат для очищения воды при помощи химических реактивов | 1917 |
|
SU2A1 |
