ю
Од
0W./
Изобретение относится к электротехнике и может быть использовано в многодвигательном электроприводе при работе двигателей в системах с упру- г|ими связями и зазорами.
Целью изобретения является повышение надежности электромеханической системы с упругими элементами и зазорами в передачах и рабочем оборудова- НИИ и повышение качества регулирования скорости путем снижения амплитуды упругих моментов и уменьшения пульсаций угловых скоростей в электроприводе.
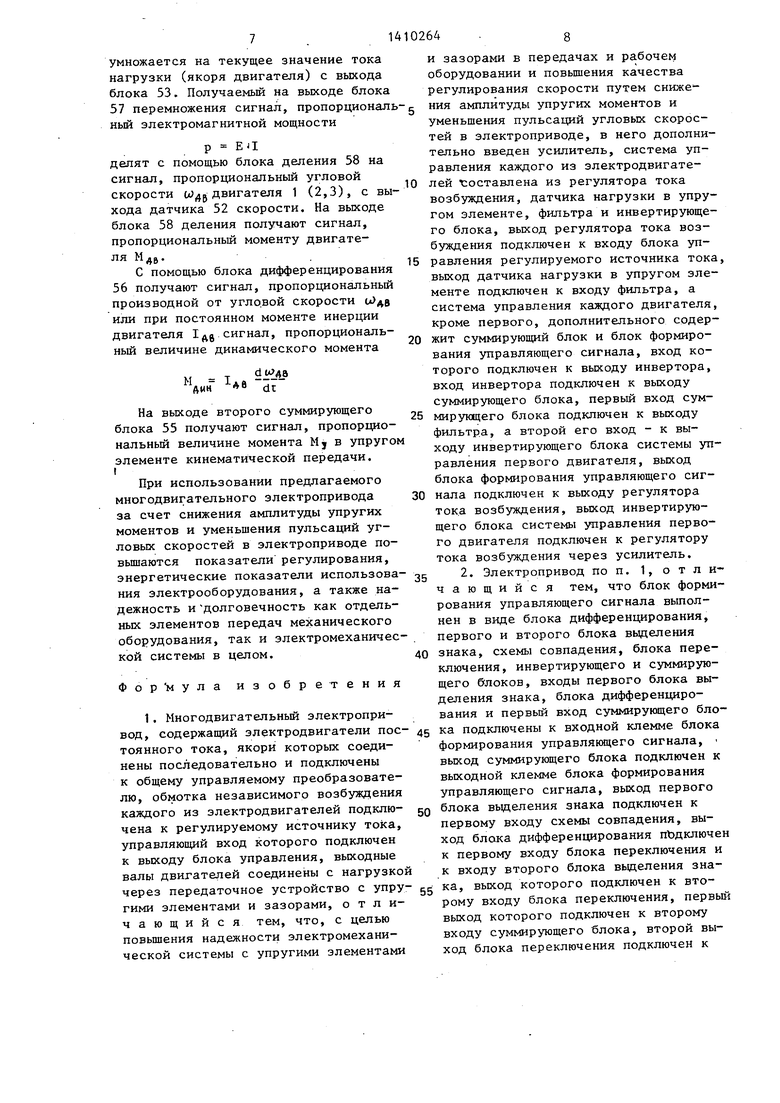
На фиг. 1 представлена схема электропривода; на фиг. 2 - схема блока формирования управляющего сигнала; на фиг. 3 и 4 - схемы датчика нагрузки в упругом элементе.
Многодвигательный электропривод содержит (фиг. 1) электродвигатели 1-3 постоянного тока, якори которых подключены последовательно к общему управляемому преобразователю А, об- мотка независимого возбуждения 5 (6, 7) каждого из двигателей 1-3 подключена к регулируемому источнику тока 8 (9, 10), управляющий вход каждого из источников 8-10 подключен к выхо- ду блока управления 11 (12, 13), выходные валы двигателей 1-3 соединены с нагрузкой 14 через передаточное, устройство 15 (16, 17) с упругими эпементами и зазорами, система управления каждым из двигателей составлена из регулятора тока возбуждения 18 (19, 20), датчика 21 (22, 23) нагрузки в упругом элементе, фильтра 24 (25, 26) и инвертирующего блока 27 (28, 29), выход регулятора тока возбуждения 18 (19, 20) подключен к вкоду блока управления 11 (12, 13) регулируемого источника тока 8 (9, lb), Bbtxод датчика 21 (22, 23) наг- в упругом элементе подключен к входу фильтра 24 (25, 26), а систему управления каждого двигателя 1-3, к|роме первого, дополнительно содержит бл.ок З О (31) формирования управ- л|яющего сигнала, вход которого под- к|1ючен к выходу инвертора 28 (29), последнего подключен к выходу суммирующего блока 32 (33), цервый вЦод суммирующего блока 32 (33) под- кЛючен к выходу фидьтра 25 (26), а в горой его вход - к выходу инвертирующего блока 27 системы управления первого двигателя 1, выход блока 3.0
(31) формирования управляющего сигнала подключен к входу регулятора тока возбуждения 18 (19, 20), выход инвертирующего блока 27 системы управления первого двигателя 1 подключен к регулятору 18 тока возбуждения через усилитель 34, управляющий вход общего управляемого преобразователя 4 подключен к регулятору 35 через блок 36 управления преобразователем 4.
Блок формирования управляющего сигнала (фиг. 2) 30 (31) выполнен в виде блока 37 дифференцирования, первого 38 и второго 39 блоков выделения знака, схемы 40 совпадения, блока 41 переключения, инвертирующего 42 и суммируницего 43 блоков, входы блоков 38 вьделения знака, дифференцирования 37 и первый вход суммирующего блока 43 подключены к входной клемме блока формирования управляющего сигнала 30 (З), выход суммирующего блока 43 подключен к вы ходной клемме блока 30 (31) формирования управляющего сигнала, выход первого блока 38 вьщеления знака подключен к первому входу схемы 40 совпадения, выход блока 37 дифференцирования подключен к первому входу блока 41 переключения и к входу второго блока 39 вьщеления знака, выход которого подключен к второму входу схемы 40 совпадения, выход последней подключен к второму входу блока 41 переключения, первьш вьосод которого подключен к второму входу суммирующего блока 43, второй выход блока 41 переключения подключен к третьему входу суммирующего блока 43 через инвертирующий блок 42,
Датчик 21 (22, 23) нагрузки выполнен (фиг. 3) в виде укрепленных на входном и выходном валу передаточного устройства 15 (16, 17) тензорезисто- ров 44 и 45, выход первого тензоре- зистора 44 подключен через первый 46 резистор к инвертирующему входу операционного усилителя 47, к этому же входу которого через второй резистор 48 подключен его выход, выход второго тензорезистора 45 через третий резистор 49 подключен к неинвертирующему входу операционного усилителя 47, к этому же входу которого через четвертый резистор 50 подключена общая точка питания операционного усилителя 47, выход операционного усилителя
31
47 подключен к выходной клемме датчика 21 (22) нагрузки.
Датчик 21 (22, 23) нагрузки в упругом элементе (фиг. 4) вьшолнен в виде датчиков напряжения 51, скорости 52 и тока 53 двигателя 1 (2, 3) первого 54 и второго 55 суммирующих блоков, блока 56 дифференцирования, блоков перемножения 57 и деления 58, вход датчика 51 напряжения подключен к якорю двигателя 1 (2, 3), а его выход - к первому входу первого суммирующего блока 54, выход датчика 52 скорости подключен к второму входу блока 58 деления и к входу блока 56 дифференцирования, датчик 53 тока двигателя своим выходом подключен к второму входу блока перемножения 57 и к второму инвертирующему входу первого суммирующего блока 54 через подключенные параллельно резистор 59 и конденсатор 60, выход первого суммирующего блока 54 подключен к первому входу блока перемножения 57, выход последнего подключен к первому входу блока 58 деления, выход которого подключен к первому входу второго суммирующего блока 55, к второму инвертирующему входу которого подключе выход блока дифференцирования 56, выход второго суммирующего блока 55 подключен к выходной клемме датчика 21 (22, 23) нагрузки.
Электропривод работает следующим образом.
Обеспечение заданного закона движения рабочего органа 14 осуществляют, воздействуя соответствующим сигналом задания скорости электропривода (управляющий сигнал) на вход регулятора 35 и дальнейщим преобразованием этого сигнала с помощью блока 36 управления управляемого преобразователя 4, электродвигателей 1-3 и передач 15-17 в требуемую скорость движения рабочего органа 14.
Наличие упругих элементов и зазоров в передачах 15-17 в сочетании со сложным режимом работы электропривода вызывает рост упругих нагрузок и колебание угловых скоростей двигателей 1-3.
В многодвигательном электропривод измеряют нагрузку электродвигателей 1-3 в передачах 15-17 с помощью датчиков 21-23 нагрузки, выделяют с помощью фильтров 24-26 переменную составляющую сигналов, пропорциональ10264
0
5
0
5
0
5
0
5
0
5
ных упругим нагрузкам в передачах 15-17, инвертируют с помощью инвертирующего блока 27 сигнал с выхода фильтра 24. С помощью суммирующих блоков 32 и 33 получают соответственно сигналы, пропорциональные.сумме сигналов с инвертирующего блока 27 и фильтров 25 и 26. С помощью инвертирующих блоков 28 и 29 инвертируют полученньш на выходе блоков 32 и 33 результирующий сигнал, про- порциональньй разности мгновенных значений нагрузок между двигателями 2, 1 и 3, 4 соответственно. С помощью блока формирования управляющего сигнала 30 (31) полученный на выходе инвертирующего блока 28 (29) сигнал преобразуют и воздействуют полученным сигналом на вход регулятора 19 (20) тока возбуждения двигателей 2 и 3, изменяя тем самым напряжение управляемого преобразователя 9 (10). Изменение тока возбуждения двигателей 2 и 3 относительно тока возбуждения двигателя 1 вызывает изменение их электромагнитных моментов в функции сигнала, пропорционального разности нагрузок в упругих элементах передач 15-17 относительно нагрузки в упругом элементе передачи 15 первого двигателя 1, что снижает амплитуды упругих моментов и уменьшает колебания угловых скоростей двигателей относительно соответствующих колебаний первого двигателя 1. Таким образом, колебания выходного параметра (момента, скорости) двигателей 1-3, кроме 1, приводятся к колебаниям соответствующих параметров первого двигателя 1, которые устраняются с помощью дополнительного сигнала, получаемого на выходе инвертора 27 и усиленного усилителем 34, направляемого на вход регулятора тока возбуждения 18 первого двигателя. Этот дополнительный сигнал соответствует выделенной с помощью фильтра 24 переменной составляющей нагрузки в упругом элементе передачи 15 первого двигателя 1, но взятой с обратным знаком, что обеспечивает активное гашение (демпфирование) колебаний выходного параметра электропривода и ограничение уровня и продолжительности действия динамических нагрузок в механических передачах и рабочем оборудовании. Это повышает надежность и долговечность электромеханической
I системы с упругими элементами и за- 1 зорами в передачах. I Блок формирования управляющего I сигнала 30 (31) работает следующим образом.
При подаче на вход блока 30 (31) сигнала с выхода блока 28 (29) с помощью блока 38 выделения знака этот сигнал преобразуется в сигнал прямоугольной формы, а с цомощью блока 37 дифференцирования сигнал с выхода блока 28 (29) дифференцируется. С помощью второго блока 39 выделения знака сигнал с выхода блока 37 преобразуется в сигнал прямоугольной формы. Схема 40 совпадения образует на своем выходе также сигнал прямоугольной формы, но тогда и только тогда, когда знаки сигналов, подавае мых на ее входы с соответствующих выходов блоков 38 и 39, совпадают.Блок переключения 41 образует на своем первом выходе сигнал, совпадающий с сигналом с выхода блока 39, если на управляющем его входе имеется сигнал, при этом на втором выходе блока переключения 41 сигнал отсутствует. Если на управляклцем входе (т.е. с выхода блока 40) сигнал отсутствует, то блок переключения 41 образует на своем втором выходе сигнал, совпадающий с сигналом с выхода блока 37,ко- торьш с помощью инвертирующего блока 42 меняет свой знак .на противоположный. С помощью суммирующего блока 43 выход которого является выходом блок формирования управляющего сигнала 30 (31), завершается формирование управляющего сигнала; в результате суммирования на его входах сигналов с выходов блока 28(29) блока 31 и 42 на выходе блока 43 формируется управляющий сигнал.
Если датчик нагрузки 21 (22, 23) выполнен в виде совокупности элементов и блоков, показанной на фиг. 3, то его работа осуществляется следую- Ещм образом.
При работе электропривода вследствие действия нагрузки происходит деформация валопровода передаточного устройства, пропорциональная значени упругого момента
где с -Ч-,
М с( Ч, - Ч а 1 - жесткость валопровода;
углы поворота (скручивания) входного и выходного концов валопровода.
10
15
2п м 102646
Закрепленные на входном и выходном концах валопровода тензометрические датчики, выполненные в виде тензоре- зисторов 44 и 45 воспринимают эту нагрузку и с помощью операционного усилителя 47, а также совокупности резисторов 46, 48-50 усиливает ее до необходимого значения.
Если датчик нагрузки 21-23 выполнен в виде совокупности элементов и блоков, изображенных на фиг. 4, то его работа осуществляется следующим образом.
Нагрузка в упругом элементе кинематических передач может быть определена по выражению
. dt
IAB
Ы
25
--дв
п м
Ав
момент в упругом элементе кинематической передачи j момент, развиваемый исполнительным двигателем момент инерции и угловая скорость ротора исполнительного двигателя. Момент, развиваемый исполнительным двигателем 1 (2, 3), определяют с помощью совокупности блоков и зле- 0 ментов 51-60 по выражению
АГ 1
где Е, I - противо-ЭДС и ток якоря двигателя. Для двигателя с независимым возбуждением противо-ЭДС Е определяют как
Е и - IR(1+T,p) где и - напряжение,, приложенное к
якорю двигателя; сопротивление якорной цепи и электромагнитная постоянная времени якорной цепи;
35
0
R,TQ 2п м
45
d dt
- оператор дифференцирования.
0
5
С помощью датчика напряжения 51 определяют текущее значение напряжения и на якоре двигателя, с помощью датчика тока 53 и подключенных параллельно резистора 59 и конденсатора 60 определяют падение напряжения ли в якорной цепи двигателя. 4U IR(l+T,p)
На выходе первого суммирующего блока 54 получают сигнал, пропорциональный текущему значении противо-ЭДС исполнительного двигателя 1(2,3), который с помощью блока перемножения 57
умножается на текущее значение тока нагрузки (якоря двигателя) с выхода блока 53. Получаемый на выходе блока 57 перемножения сигнал, пропорционал ный электромагнитной мощности
р EJI
делят с помощью блока деления 58 на сигнал, пропорхщональный угловой скорости двигателя 1 (2,3), с выхода датчика 52 скорости. На выходе блока 58 деления получают сигнал, пропорциональный моменту двигателя М
4В-.
С помощью блока дифференцирования 56 получают сигнал, пропорциональный производной от угловой скорости и)дв или при постоянном моменте инерции двигателя сигнал, пропорциональный величине динамического момента
м - т дин- Ав dt
На выходе второго суммирующего блока 55 получают сигнал, пропорциональный величине момента Mj в упруго элементе кинематической передачи.
При использовании предлагаемого многодвигательного электропривода за счет снижения амплитуды упругих моментов и уменьшения пульсаций угловых скоростей в электроприводе повышаются показатели регулирования, энергетические показатели использова ния электрооборудования, а также надежность и долговечность как отдельных элементов передач механического оборудования, так и электромеханической системы в целом.
Фор мула изобретения
1. Многодвигательный электропривод, содержащий электродвигатели пос тоянного тока, якорй которых соединены последовательно и подключены к общему управляемому преобразователю, обмотка независимого возбуждения каждого из электродвигателей подклю- чена к регулируемому источнику тока, управляющий вход которого подключен к выходу блока управления, выходные валы двигателей соединены с нагрузко через передаточное устройство с упру гими элементами и зазорами, отличающийся тем, что, с целью повьш1ения надежности электромеханической системы с упругими элементами
5
0
5
0 5 0
5 g g
и зазорами в передачах и рабочем оборудовании и повьшения качества регулирования скорости путем сниже - ния амплитуды упругих моментов и уменьшения пульсаций угловых скоростей в электроприводе, в него дополнительно введен усилитель, система управления каждого из электродвигателей Х:оставлена из регулятора тока возбуждения, датчика нагрузки в упругом элементе, фильтра и инвертирующего блока, выход регулятора тока возбуждения подключен к входу блока управления регулируемого источника тока, выход датчика нагрузки в упругом элементе подключен к входу фильтра, а система управления каждого двигателя, кроме первого, дополнительного содержит суммирующий блок и блок формирования управляющего сигнала, вход которого подключен к выходу инвертора, вход инвертора подключен к выходу суммирующего блока, первый вход сум- мирукщего блока подключен к выходу фильтра, а второй его вход - к выходу инвертирующего блока системы управления первого двигателя, выход блока формирования управляющего сигнала подключен к выходу регулятора тока возбуждения, выход инвертирующего блока системы управления первого двигателя подключен к регулятору тока возбуждения через усилитель.
2. Электропривод по п. 1, отличающийся тем, что блок формирования управляющего сигнала выполнен в виде блока дифференцирования, первого и второго блока выделения знака, схемы совпадения, блока переключения, инвертирующего и суммирующего блоков, входы первого блока выделения знака, блока дифференцирования и первый вход суммирующего блока подключены к входной клемме блока формирования управляющего сигнала, выход суммирующего блока подключен к выходной клемме блока формирования управляющего сигнала, выход первого блока выделения знака подключен к первому входу схемы совпадения, выход блока дифференцирования пЪдключен к первому входу блока переключения и к входу второго блока вьщеления знака, выход которого подключен к второму входу блока переключения, первый выход которого подключен к второму входу суммирующего блока, второй выход блока переключения подключен к
фретьему входу суммирующего блока че- инвертирующий блок.
3. Электропривод по п. 1, отличающийся тем, что датчик на- 1 рузки в упругом элементе выполнен в ниде укрепленных на входном и выходном валу передаточного устройства тензорезисторов, выход первого тен- гюрезистора подключен через первый р езистор к инвертирующему входу операционного усилителя, к этому же вхо- ЛУ которого через второй резистор Г одключен его выход, выход второго тензорезистора через третий резистор г:одключен к неинвертирующему входу операционного усилителя, к этому,же 1ХОДУ которого через четвертый резистор подключена общая точка пита- tHH операционного усилителя, выход операционного усилителя подключен к выходной клемме датчика нагрузки.
4. Электропривод по п. 1, о т л и- йающийся тем, что датчик н{агрузки в упругом элементе вьшолнен виде датчиков напряжения, скорости
и тока двигателя, первого и второго суммирующих блоков, блока дифференцирования, блоков перемножения и де- ления, вход датчика напряжения подключен к якорю исполнительного двигателя, а его выход - к первому входу первого суммирующего блока, выход датчика скорости подключен к входу 0 Делитель блока деления и к входу блока дифференцирования, датчик тока двигателя своим выходом подключен к второму входу блока перемножения и к второму инвертирующему входу пер- вого суммирующего блока через подключенные параллельно резистор и конденсатор, выход первого суммирующего блока подключен к первому входу блока перемножения, выход последнего под- 0 ключей к входу Делимое блока деления, выход которого подключен к первому входу второго суммирующего блока, к второму инвертирующему входу которого подключен выход блока дифферен- 5 цирования, выход второго суммирующего блока подключен к выходной клемме датчика нагрузки.
| название | год | авторы | номер документа |
|---|---|---|---|
| Реверсивный тиристорный электропривод с упругой передачей от двигателя к механизму | 1977 |
|
SU731539A1 |
| Электропривод постоянного тока | 1983 |
|
SU1115188A1 |
| УСТРОЙСТВО ДЛЯ УПРАВЛЕНИЯ ЭЛЕКТРОПРИВОДОМ С ФРИКЦИОННОЙ НАГРУЗКОЙ | 1992 |
|
RU2079961C1 |
| Электропривод постоянного тока с подчиненным регулированием параметров | 1980 |
|
SU985914A1 |
| УСТРОЙСТВО ДЛЯ АВТОМАТИЧЕСКОГО УПРАВЛЕНИЯ ЭЛЕКТРОМЕХАНИЧЕСКОЙ СИСТЕМОЙ | 2010 |
|
RU2428735C1 |
| Электропривод постоянного тока | 1984 |
|
SU1228208A2 |
| УСТРОЙСТВО ДЛЯ АВТОМАТИЧЕСКОГО УПРАВЛЕНИЯ ЭЛЕКТРОМЕХАНИЧЕСКОЙ СИСТЕМОЙ С ВЯЗКОУПРУГОЙ КИНЕМАТИЧЕСКОЙ СВЯЗЬЮ | 2010 |
|
RU2446552C2 |
| СПОСОБ АВТОМАТИЧЕСКОГО УПРАВЛЕНИЯ ПАРАМЕТРАМИ ЭЛЕКТРОМЕХАНИЧЕСКОЙ СИСТЕМЫ И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2010 |
|
RU2414048C1 |
| Электропривод постоянного тока | 1983 |
|
SU1145438A1 |
| Устройство для управления асинхронным электроприводом лифта | 1979 |
|
SU773883A1 |

Изобретение относится к электротехнике и может быть использовано при работе двигателей в системах с упругими связями и зазорами. Целью изобретения является повьшение надежности электромеханической системы с упругими элементами и зазорами в передачах и рабочем оборудовании и повышение качества регулирования скорости путем снижения амплитуды упругих моментов и уменьшения пульсаций угловых скоростей в электроприводе. Электропривод содержит датчики 21, 22, 23 нагрузки, выходы которых через фильтры 24, 25, 26, инвертирующие блоки 27,.28, 29 связаны с регуляторами тока возбуждения 18, 19, 20. Изменение тока возбуждения двигателей 2, 3 относительно тока возбуждения двигателя 1 вызывает изменение их электромагнитных моментов в функции сигнала, пропорционального разности нагрузок в упругих элементах передач 15, 16, 17 относительно нагрузки в упругом элементе передачи 15 первого электродвигателя 1. 3 з.п. ф-лы,. 4 ил. ш (Л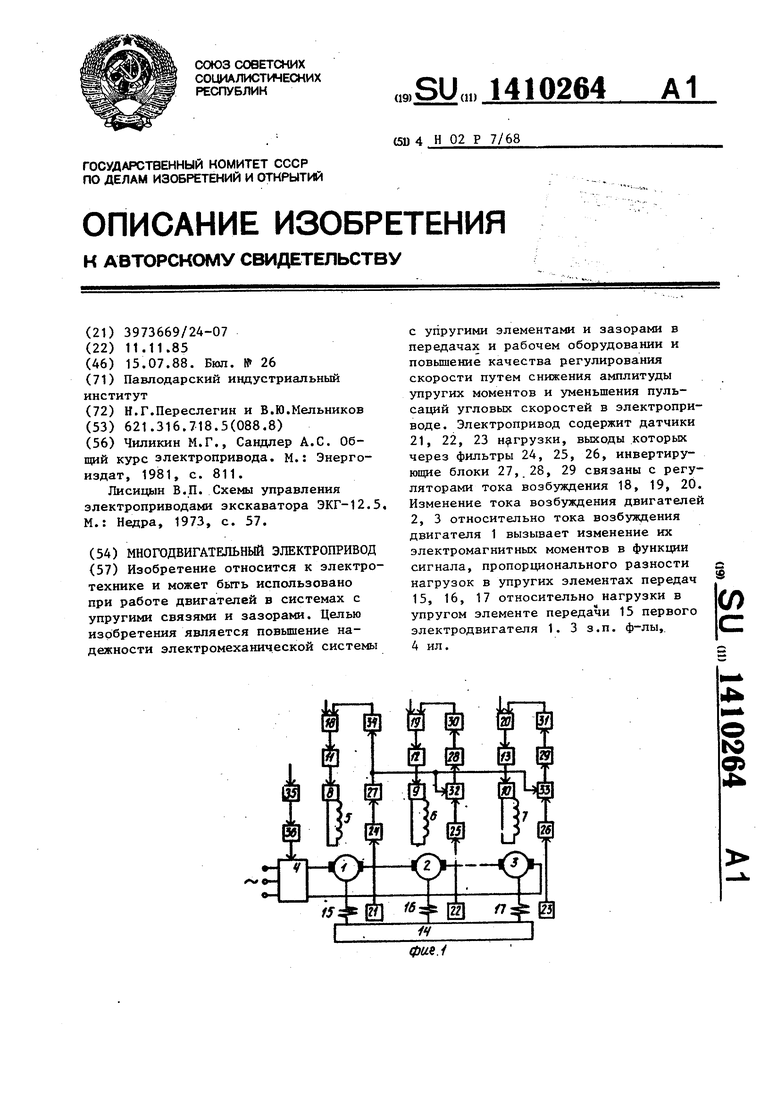
Г
фиг. 2
гП2г,2зГ
(pU2.Z
фиг,
| Чиликин М.Г., Сандлер А.С | |||
| Общий курс электропривода | |||
| М.: Энерго- издат, 1981, с | |||
| Электромагнитный насос | 1923 |
|
SU811A1 |
| Лисицын В.П | |||
| Способ гальванического снятия позолоты с серебряных изделий без заметного изменения их формы | 1923 |
|
SU12A1 |
| М.: Недра, 1973, с | |||
| Способ получения на волокне оливково-зеленой окраски путем образования никелевого лака азокрасителя | 1920 |
|
SU57A1 |
