i
Изобретение относится к электропрй водам по системе управляемый преобразователь-двигатель с системой подчиненного регулирования механизмов поворота экскаваторов, кранов и других машин с относительно большими значениями маховых масс, содержащих упругие механические связи и значительный, приведенный к валу двигателя, зазор.
Известны устройства для управления электроприводом одноковшовых экскаваторов, предназначенные для плавного выбора зазора в передачах,обеспечивающих это путем значительного снижения темпа разгона двигателя на период выбора зазора, содержащие регуляторы тока и напряжения, датчики тока и напряжения, задатчик интенсив ности, включающий последовательно соединенные релейный элемонт, инверjop и интегратор f 1«
Недостатком этого устройства яв ляется низкая управляемость машины
при выполнении вспомогательных операций.
Известно также устройство для управления электроприводом одноковшового экскаватора, вы.полненное по системе управляемый преобразователь-двигатель с двухконтурной системой подчиненного регулирования, содержащее регуляторы токаи скорости, датчики тока и скорости, команде аппарат, триггер, ключ, -релейный элемент, инвертор, источник питания 2.
К недостаткам этого устройства относится .снижение темпа разгона двигателя на период выбора зазора, что вызывает увеличение продолжительности цикла поворота и приводит к снижению производительности экскаватора .
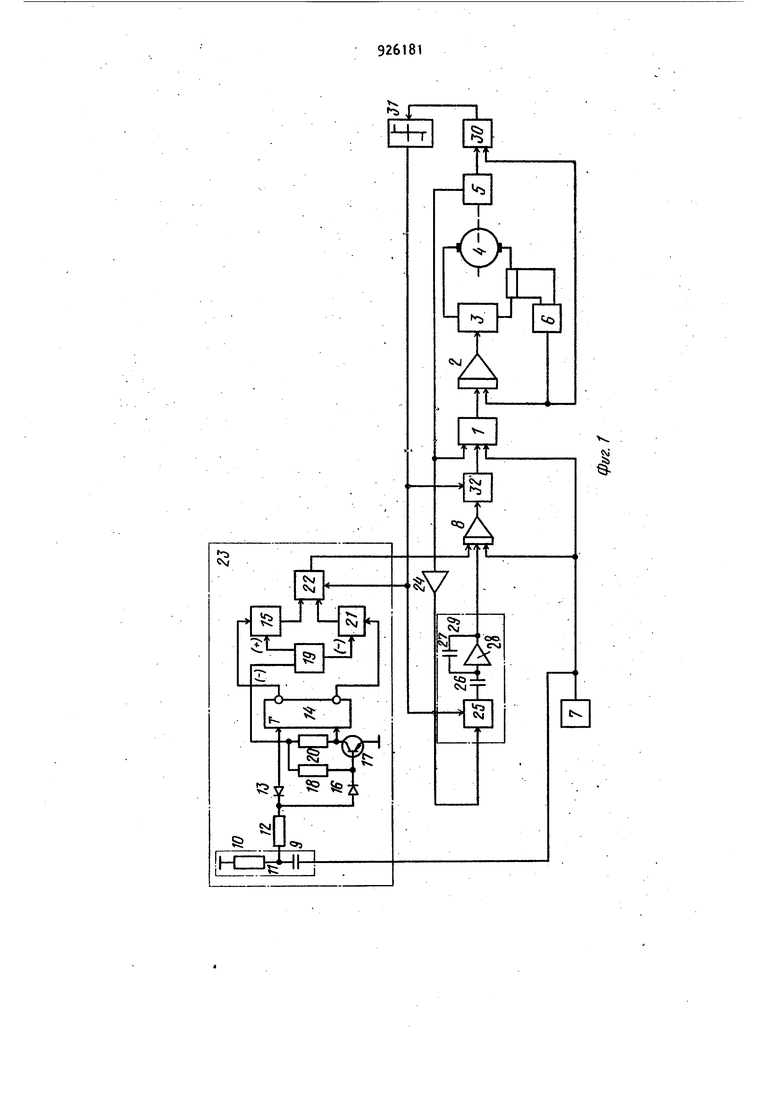
Целью изобретения является уменьт шение времени выбора зазоров. Цель достигается тем, что устройство снабжено датчиком упругого момента, блоком памяти, блоком задания и суммирующим усилителем, причем блок памяти выполнен в виде последовательно соединенных ключа и инвертора, в цепь обратной связи и на вход которого включены конденсаторы, блок задания выполнен в .виде дифференцирующей цепочки, транзистора, триггера и трех ключей, при этом один из входов первого и второго ключей соединены с источНИКОМ питания, их управляющие входы соединены с выходами триггера, а выходы первого и второго ключей соеi динены с входами третьего ключа, управляющий вход которого соединен через иелейный элемент с датчиком упругого момента и непосредственно с управляющим входом ключа блока памяти, вход ко-горого через инвертор соединен с датчиком скорости и одним из входов регулятора скорости, а выход - с Одним из входов суммирующего усилителя, другой вход которого соединен с выходом третьего ключа, третий вход связан с командоаппаратом, дифференцирующей цепочкой и другим входом регулятора скорости, третий вход которого.через клфч соединен с выходом суммирующего усилитиля, причем управляющий вход ключа соединен с управляющим входом ключа блока памяти. На фиг.1 изображена принципиальная электрическая схема устройства ДЛЯ управления электроприводом одноковшового экскаватора; на фиг.2 - вр менные диаграммы, поясняющие его рабо устройство содержит электропривод по системе управляемый преобразователь-двигатель с двухконтурной системой подчиненного регулирования, со тоящий из последовательно включенносо дегулягора 1 скорости и регулятора 2 тока, подключенного к тиристорному преобразователю, который подсоединен с двигателем k. Обратные связи в системе управления осуществляется с помощью датчика 5 скорости и датчика 6 тока. Сигнал на поворот поступает с командоаппарата 7С командоаппарата 7 сигнал поступает на регулятор 1 скорости, сум мирующий усилитель 8, на емкость 9 и резистор 10 дифференцирующей цепом ки 11 и через ограничительное сопротивление 12,. диод 13 поступает на I 9 14 вход триггера Т«, который соответственным выходом связан с управляющей цепью ключа 15, а через диод 16 на базу транзистора 17 и сопротивлёние 1Ь смещения, которое связано с источником 19 питания и ограничительным сопротивлением 20, которое связано с коллектором транзистора 17 и вторым входом триггера , второй выход которого подключен к управляющей цепи ключа 21. Входные цепи ключей 15 и 21 подсоединены кисточнику 19 питания, а выходные к входу ключа 22, выход которого является выходом 23 задания и связан с суммирующим усилителем 8. С датчика 5 скорости сигнал поступает через инвертор 2Ц на ключ 25i который связан через емкость 26 с емкостью 27 и инвертором 28 блока 29 памяти и с инвертором 28 поступает на емкость 27 и на суммирующий усилитель 8. Выход датчика 30 упругого момента подключен через релейный элемент 31 к цепям управления ключей 32, 22 и 25, а вход его соединен с датчиком 5 скорости и датчиком 6 тока. Устройство работает следующим образом. При подаче с командоаппарата 7 сигнала U-j в момент времени -t-, на поворот платформы нарастание U-j в положительном направлении вызывает положительный импульс в дифференцирующей цепочке 11, который через ограничительное сопротивление 12, диод 16 поступает на базу транзистора 17, закрывает его вызывая запись 1 в триггере на его выходе, связанном с управляющей цепью ключа 21, замыкая ключ 21 и коммутируя источник 19 питания с входом ключа 22. При наличии зазора сигнал с датчика 3 упругого момента отсутствует и ключи 22 и 32 замкнуты, а. ключ 25 разомкнут. При . этом на регулятор 1 скорости постуnaiQT сигналы с командоаппарата 7 (.U-j), с датчика 5 скорости .) 1и суммирующего усилит еля 8, на вход которого поступают сигналы с блока 23 задания ( командоаппарата 7 (.и-,) и блока 29 памяти (Uriji-KocW 0, так как привод до этого стоял). Управляющим сигналом при этом, поступающим на регулятор 1 скорости, будет сигнал с блока 23 задания, который обеспечивает ра-згон двигателя по скорости, равной от задан592ной скорости поворота платформы ., (ujrj) . В момент времени t«j двигатель h достигает ее и про должает установившееся движение до Момента зацепления с платформой (). При зацеплении с датчика 30 упругого момента через релейный элемент 31 поступает сигнал, размыкающий ключи 22 и 32 и замыкающий ключ 25 блока 29 памяти, на который через инвёртор 2 поступает, сирнал с датчика 5 скорости, равный К QC. л) , где uJ текущее Значение скорбсти двигателя k Выход суммирующего усилителя 8 при этом отключается от входа регулятора 1 скорости и на вход последнего поступает только сигнал с командоаппарата 7 (U-) , обеспечивающий разгон привода до скорости uij , и сигнал обратной связи по скорости с датчика 5 скорости (Ug-ICQ -u;).В интервале времени tj, привод работает в установившемся режиме. При реверсе с командоаппарата 7 поступает сигнал ) вызывающий отрицательный импульс в дифференцирующей цепочке П , который через ограничительное сопротивление 12, диод 13 поступает на триггер И, вызывая запись 1 на его выходе, свя занном с управл 1ющей цепью ключа 15, замыкая ключ 15 и коммутируя источник 19 питания с входом 22 ключа. Одновременно с выходом двигателя из зацепления сигнал с Датчика 30 упругого MOMeHta становится равным нулю и ключи 22 и 32 замыкаются, а ключ 25 размыкается. При этом на блоке 29 запоминается скорость двигателя j, предшествуя реверсу сигналом -К,- w И нЬ вход регулятора 1 скорости поступают сигналы с командоаппарата 7 ( с датчика 5 скорости (Us К.ос суммирующего усилителя 7i на вход которого поступают сигналы с блока 29 памяти (Ui g-Koc -cOj) . При этом на вход регулятора 1 скорости поступает сигналобеспечивающий снижение скорости двигателя Ц на от заданной, т.е. зацепление двигателя Ц с платформой происходит при ограниченной разнице скоростей между HP ми, равной соответственно ,). В момент времени двигатель k входит в зацепление. С датчика 30 упругого 16 момента через релейный элемент 31 поступает сигнал на управляющие цепи ключей 22, 32 и 25, При этом ключи 22 и 32 размыкаются, а ключ 2} замыкается, обеспечивая подачу на блок 29 памяти сигнала с датчика 5 скорости через инвертор 2Ц, равного - Kottt . В этом случае на регулятор 1 скорости поступает сигнал с командоаппарата 7(-i) и сигнал обратной связи по скорости с датчика 5 скорости (, обеспечивающие достижение приводом заданной скорости- (t0). 8 интервале времени происходит торможение привода. При этом сигнал с командоаппарата 7(Н17) изменяется в положительном направлении, к нулю, двигатель выходит из зацепления и выход с датчика 30 упругого момента через релейный элемент 31 равен нулю, ключи 22 и 32 замыкаются, а ключ 25 размыкается. Изменение -U в положительном направлении вызывает положительный импульс в дифференцирующей цепочке 11(Ug) , который проходит через ограничительное сопротивление 12, диод 16, поступает на базу транзистора 17, закрывает его, вызывая запись 1 на выходе три| гера Н, связанном с управляющей цепью ключа 21, и, включая его, подключает источник 19 питания с входом ключа 22. 8 этом случае на регулятор 1 скорости поступают сигналы обратной связи по скорости с датчика 5 скорости (Ug-Kop-tA) и с суммирующего усилитепя 8, iTa вход которого поступают сигналы с блока 29 памяти (U(() и блока 23 задания C-Uij,j|). На вход регулятора скорости при этом поступает сигнал йхрс +0( обеспечивающий снижение скорости двигателя на 5-10% от заданной (). В двигатель интервале времени k вращается с постоянной скоростью до зацепления с платформой (t). При зацеплении с датчика 30 упругого момента через релейный элемент 31 на управляющие цепи ключей 22, 32 и 25 поступает сигнал, замыкающий ключ 25 и размыкающий ключи 22 и 32. flpи этом на блок 29 памяти через инвертор 2Ц с датчика 5 скорости поступает сиг- нал -KQJ.. (JU , а на вход регулятора 1 скорости поступает сигнал обратной связи по СКОрОСГИи с датчика 5 скорости, осуществляющий торможение привода (). В интервале времени произ водится операция дотягивания, при KO торой схема работает аналогично предыдущим режимам. Устройство позволяет полностью ис пользовать электропривод в случае ра боты контура ограничения тока, тем самым способствуя снижению продолжительности цикла выбора зазора. Формула изобретения Устройство для управления электро приводом одноковшового экскаватора, выполненное по системе управляемый преобразователь-двигатель с регулят рами и датчиками тока и скорости, ко мутатором, триггером, ключом, релейным элементом, инвертором и источником питания, отличающеес я тем, что, с целью повышения про изводительности экскаватора, оно снабжено датчиком упругого момента, блоком памяти, блоком задания и суммирующим усилителем, причем блок памяти выполнен в виде последовательно соединенных ключа и инвертора, в цепь обратной связи и на вхо/ которого включены конденсаторы, блок задания выполнен в виде дифференцирующей цепочки, транзистора, триггера и трех ключей, при этом одиниз входов первого и второго ключей соедине ны с источником питания, их управляющие входы соединены с выходами триггера, а выходы первого и второго ключей соединены с входами третьего ключа, управляющий вход которого соединен через релейный элемент с датчиком упругого момента и непосредственно с управляющим входом ключа блока памяти, вход которого через инвертор соединен с датчиком скорости и одним из в(одов регулятора скорости, а выход - с одним из входов суммирующего усилителя, другой вход которого соединен с выходом третьего ключа, третий вход связан с командоаппаратом, дифференцирующей цепочкой и другим входом регулятора скорости, третий вход которого через ключ соединен с выходом суммирующего: усилителя, причем управ7|яющий вход, ключа соединен с управляющим входом ключа блока памяти. Источники информации, принятые во внимание при экспертизе 1.Авторское свидетельство СССР № Л12358, кл. Е 02 F 9/20, 1975. 2. Автбрское свидетельство СССР Vf 601360, кл. Е 02 F 9/20, 197 (прототип) .
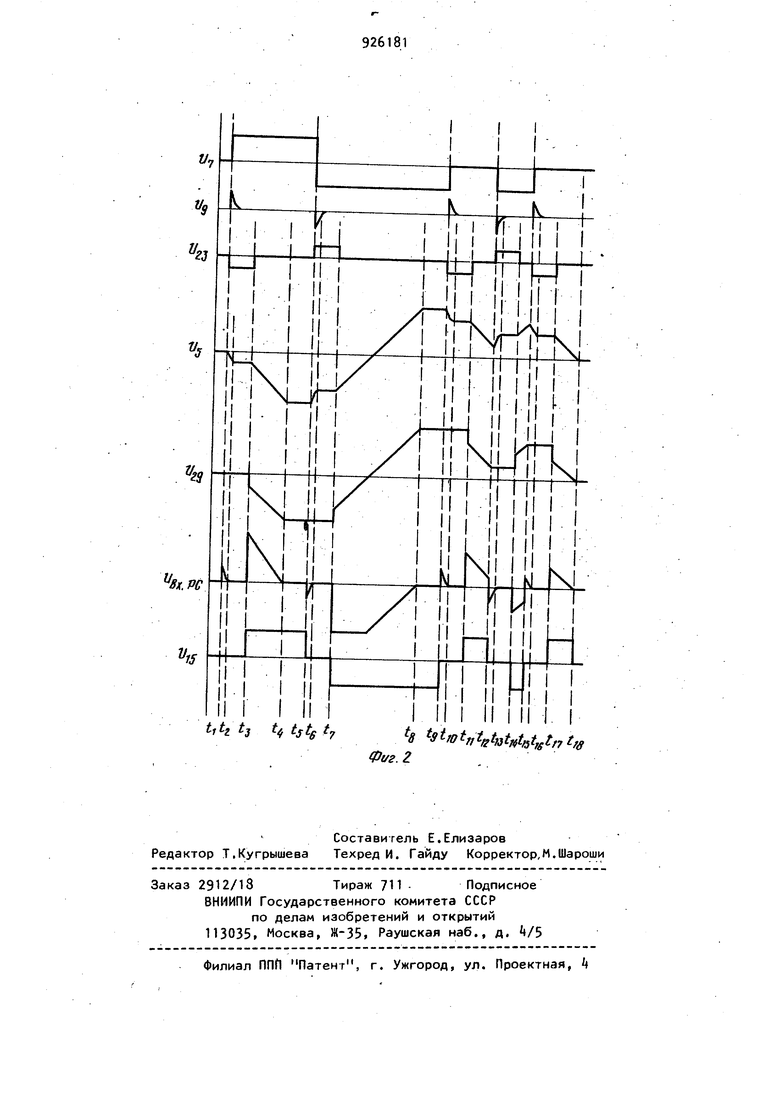
titi tj t tftg tj
I II I II I II 1. I
8 sijotn atfitj tKitjgtn re Фиг. 2
| название | год | авторы | номер документа |
|---|---|---|---|
| Способ ограничения динамических нагрузок механизма поворота экскаватора и устройство для его реализации | 1990 |
|
SU1781393A1 |
| Устройство для управления экскаватором типа прямая лопата | 1985 |
|
SU1364669A1 |
| Система автоматизированного управления транспортными перемещениями ковша экскаватора-драглайна | 1989 |
|
SU1788163A1 |
| Электропривод постоянного тока | 1978 |
|
SU744883A1 |
| Устройство защиты стрелы экскаваторадраглайна от растяжки | 1977 |
|
SU737576A1 |
| Устройство для управления электроприводом одноковшовного экскаватора | 1975 |
|
SU601360A1 |
| Система управления приводом вращения пода кольцевой печи | 1979 |
|
SU1337882A1 |
| Следящий электропривод | 1981 |
|
SU1045219A1 |
| Способ управления электроприводом одноковшового экскаватора и устройство для его осуществления | 1988 |
|
SU1629423A1 |
| АДАПТИВНАЯ СИСТЕМА УПРАВЛЕНИЯ ГИРОСТАБИЛИЗАТОРОМ | 2008 |
|
RU2381451C1 |