I
Изобретение относится к автоматизации грузоподъемных машин и может быть исполь зовано для защиты стрелы экскаватора-драг лайна от растяжки.
Известны устройства защиты стрелы экскаватора-драглайна от растяжки, включающие датчики положения ковша относительно стрелы, блоки сравнения и испольнительные органы, выполненные как на контактах, так и на бесконтактных элементах 1 и 2.
Недостатком подобных устройств явля; ется то, что по сигналам с датчиков положения ковша непосредственно на границе зоны опасного приближения ковша к стреле производится замедление приводов, вплоть до остановки, что приводит к снижению производительности и маневренности экскаватора.
Известно устройство защиты стрелы экскаватора-драглайна от растяжки, содержащее датчик положения ковша, подключенный ко входу блока сравнения с установкой, командоаппарат привода подъема, привод тяги, включающий командоаппарат, последовательно включенные звено ограничения и регулятор тока, выход которого подключен к системе управления преобразователя 3.
Недостатком указанного устройства является то, что для надежной защиты стрелы экскаватора-драглайна от растяжки с даль. HjHUJHM вьтходом KOBHia на траекторию выноса требуется наличиё точных данных о величинах статической нагрузки приводов подъема и тяги, скорости изменения статической нагрузки привода, скоростей приводов подъема и тяги, суммь1 этих скоростей и величины, обратной этой сумме, а также точного воспроизведения функциональной зависим ости статической нагрузки привода подъема от производной статической нагрузки привода подъема по суммарной дли15не канатов подъема и тяги, что сопряжено со значительными трудностями.
Цель изобретения - повышение надежности защиты, увеличение производительности и маневренности экскаватора при од20 новременном упрощении контроля положения ковша.
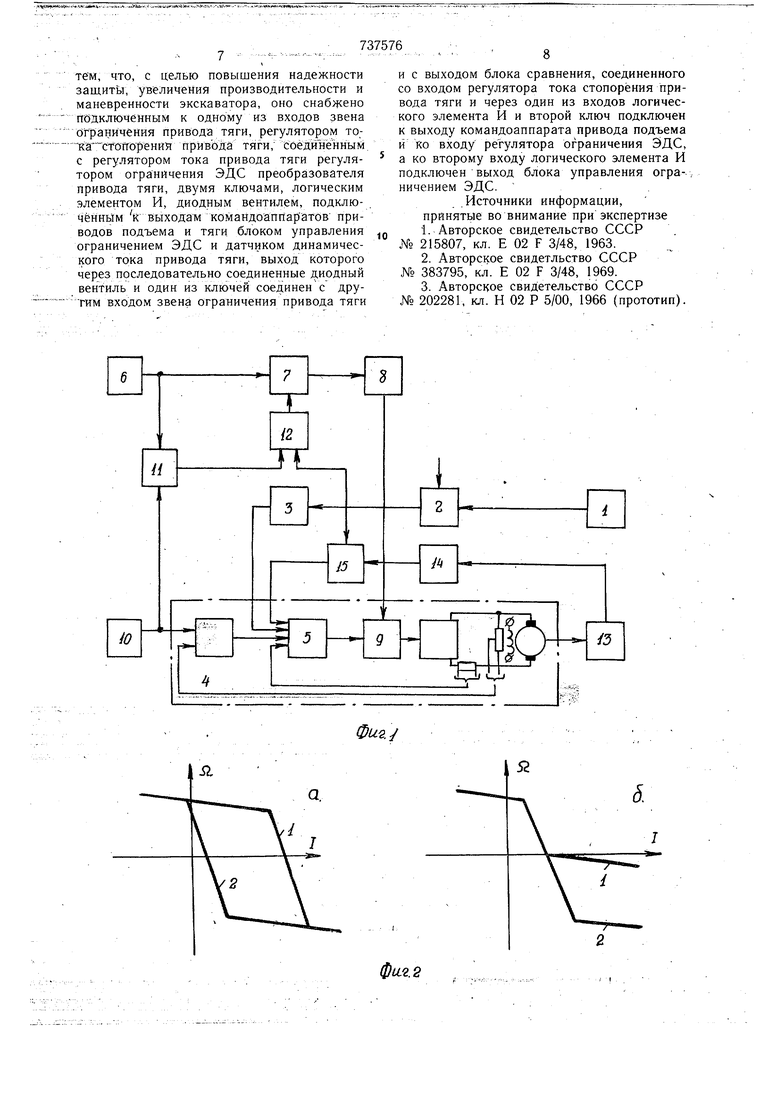
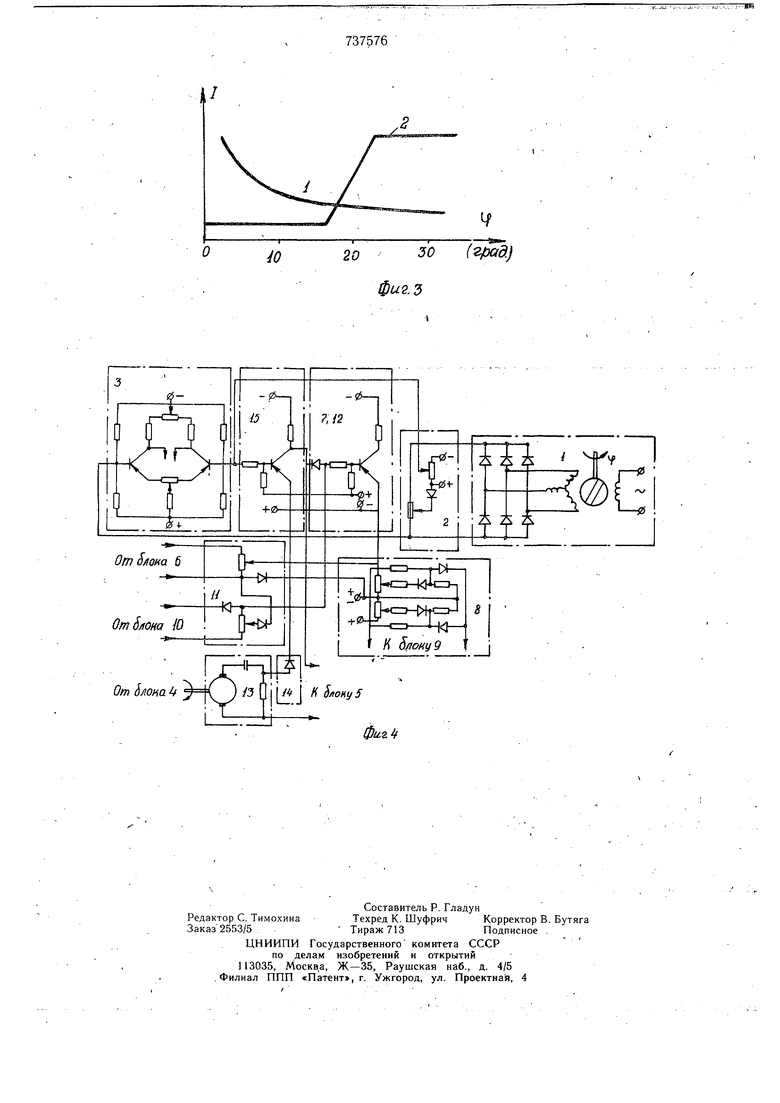
Поставленная цель достигается тем, что устройство снабжено подключенным к одному из входов звена ограничения привода тяги регулятором тока стопорения привода тяги, соединенным с регулятором тока привода тяги регулятором ограничения ЭДС преобразователя привода тяги, двумя ключами, логическим элементом И диодным вентилем, подключенным к выходам командоаппаратов приводов подъема и тяги блоком управления ограничением ЭДС и датчиком динамического тока привода тяги, выход которого через последовательно соединенные диодный вентиль и один из ключей соединен с другим входом звена ограничения привода тяги и с выходом блока сравнения, соединенного со входом регулятора тока стопорения привода тяги и,через один из входов логического элемента И и второй ключ подключен к выходу командоаппарата привода подъема и ко входу регулятора ограничения ЭДС, а ко второму входу логического элемента И подключен выход блока управления ограничением ЭДС. На фиг. 1 изображена функциональная схема устройства защиты стрелы экскаваторадраглайна от растяжки; на фиг. 2 -;- статические характеристики привода тяги; на фиг. 3 - график зависимости тока стопорения и статического тока привода тяги от коорлчинатковша; на фиг. 4 - принципиальная схема возможного варианта устроиства. Устройство содержит датчик 1 положения ковша, выход которого последовательно через блок 2 сравнения, функциональный регулятор 3 тока стопорения привода тяги подключен к приводу 4 тяги на вход звена 5 ограничения привода тяги. Командоаппарат 6 привода подъема последовательно через ключ 7, регулятор 8 ограничения ЭДС преобразователя привода тяги подключен к регулятору 9 тока привода тяги. Командоаппараты 10 привода тяги и б привода подъема подключены на входы соответствующих приводов и на входы блока 11 управления ограничением ЭДС, выход которого подключен к одному из входов логического элемента И 12, к другому входу которого подключен выход блока 2 сравнения, а выход. элемента 12 подключен на вход ключа 7. Датчик 13 динамической составляющей тока входом связан с приводом 4 тяги, а выходом - со входом звена 5 ограничения привода тяги последовательно через вентиль 14 и ключ 15, вход последнего связан с выходом блока 2 сравнения. В устройстве сигнал, пропорциональный величине угла между осью стрелы экскаватора, проходящей через центры головного блока и блока наводки, и тяговым канатом, формируется датчиком 1 и поступает на вход блока 2 сравнения, уставка которого настраивается на включение защиты в зоне, лежащей между плоскостью горизонта и осью стрелы экскаватора. При неправильных действиях оператора или при необходимости выноса ковша по максимально приближенной к стреле траектории, если измеряемый угол оказывается меньше заданного уставкой, на выходе блока 2 сравнеНИН появляется сигнал, возрастаюший по мере уменьшения угла между тяговым канатом и стрелой. Этот сигнал поступает на вход функционального регулятора 3 тока стопорения привода тяги и одновременно на один из входов логического элемента И 12. подготавливая его к включению, а также на вход ключа 15, вызывая его замьжание. Выходной сигнал функционального регулятора 3 тока стопорения привода тяги, поступая на вход звена 5 ограничения привода тяги, вызывает снижение задания тока стопорения в функции,измеряемого-угла, а, следовательно, формирует статические характеристики привода тяги со сниженным , зна чением тока стопорения (фиг. 2а, характеристика 1 соответствует максимальному, а характеристика 2 - минимальному значению тока стопорения). Ло мере уменьшения угла между стрелой и тяговым- канатом возрастает натяжение канатов, а, следовательно, и статический ток якоря, и уменьшается ток стопорения двигателя тяги (фиг. 3, кривые и 2, соответственно). Как только ток якоря превышает заданный ток отсечки, начинается торможение привода тяги, и при дальнейшем уменьшении измеряемого угла, а, следовательно, при приближении ковша к стреле, происходит реверс тяги, что в конечном счете приводит к выходу ковша на траекторию выноса к голове стрелы. Приведенная на фиг. 3 кривая 1 соответствует положению ковша у середины стрелы, у пяты стрелы она идет, значительно выше, а у головы - ниже, что способствует получению достаточно широкой рабочей зоны под стрелой. Кроме этого минимальное значение тока стопорения выбрано таким, что оно удовлетворяет одновременно требованию защиты стрелы от удара.-, порожним ковшом и предохраняет ковш от саморазгрузки у головы стрелы при малых углах между тяговым канатом и стрелой. Для обеспечения в зоне действия защиты автоматическогоплавного выхода ковша на траекторию выноса, максимально приближенную к стреле, сигнал .с выхода командоаппарата 6 привода подъема через ключ 7 поступает на вход регулятора 8 ограничения ЭДС преобразователя привода тяги. Выходной сигнал этого регулятора зависит от величины сигнала задания скорости привода подъема и подается на регулятор 9 тока привода тяги, вызывая ограничение максимального сигнала на его выходе, ко- торый, в свою очередь, является входным сиг. налом преобразователя привода тяги и, следовательно, определяет максимальную величину ЭДС преобразователя. В результате ристика 1 и для крайнего положения - характеристика 2). Скорость привода тяги выбирается несколько больше скорости привода подъема, что исключает дальнейшее приближение ковша к стреле. Для того, чтобы защита не препятствовала действиям оператора, направленным на устранение растяжки, в устройство введено отключение ограничения ЭДС преобразователя тяги ключом 7. Это происходит в случае, если командоаппарат 10 привода тяги установлен в положение «от себя и сигнал задания скорости привода тягипревышает величину сигнала задания .скорости привода подъема. Кроме этого, отключение происходит при установке командоаппарата 6 привода подъема в положение «от себя а также при выходе ковша из зоны действия защиты по сигналу с блока 2 сравнения. С этой целью ключ 7 управляется логическимэлементом И 12, сигналы на входы которого поступают с блока 11 управления ограничением ЭДС, в котором происходит сравнение сигналов задания скорости приводов, поступающих с командоаппаратов 6 и 10, и с выхода блока 2 сравнения. Во время торможения привода тяги в результате наличиня динамической ошибки натяжение тягового каната превышает значение, ограниченное сформированной защитой статической характеристикой привода. Для уменьшения-динамической ошибки в устройстве применяется датчик 13 динамической составляющей тока якоря двигателя тяги, сигнал с которого через вентиль 14 и ключ 15 поступает на вход звена 5 ограничения привода тяги и суммируется с сигналом задания тока якоря двигателя тяги. Вследствие этого натяжение тягового каната и в динамике поддерживается на уровне величины заданной защитой. Так как действие связи по динамической -составляющей тока необходимо лишь в процессе торможения двигателя тяги, то в процессе разгона она размыКается вентилем 14, применение которого к тому, же позволяет сохранить устойчивость системы управления приводом тяги. Это объясняется тем, что в то время, когда эта связь не действует, привод тяги полностью реализует свои демпфирующие свойства и гасит упругие колебания в канате. Ключ 15 управляется блоком 2 сравнения и включает связь в зоне действия зашиты. В принципиальной схеме возможного варианта исполнения устройства, приведенной на фиг. 4, датчик 1 положения ковша относительно стрелы включает лиц1ь преобразователь угловых перемещений в элекрический сигнал, выполненный на бесконтактном сельсине. Непосредственно измерение угла может производиться известным механическим устройством, включающим рамку, через которую пропускаетсй тяговый канат, и тягу, связывающую рамку с редуктором, расположенным на стреле ив свою очередь связанным с сельсинным преобразователем. Блок 2 сравнения выполнен на диоде, источником опорного найряженйя для которого является сигнал, поступающий с датчика 1. Функциональным регулятором 3 тока стопорения привода -тяги является усилитель постоянного тока, выполненный по балансной схеме. Ключ 7 и логический элемент И 12 объединены в одну транзисторную схему 7; 12 логического элемента И-НЕ. В качестве регулятора 8 ограничения ЭДС преобразователя привода тяги применена диодная схема сравнения с управляемым опорным напряжением. Блок 11 управления ограничением ЭДС также представляет собой диодную схему сравнения, через нее осуществляется управление транзисторной схемой 7; 12 И-НЕ по одному из входов и опорным напряжением регулятора 8 огра™ ЭДС преобразователя привода тяги. В качестве датчика 13 динамической составляющей тока применен тахогенератор постоянного тока с включенными на выходе дифференцирующей цепочкой, а в качестве ключа 15 - транзисторная схема логического элемента НЕ, управляющая одновременно по одному из входов транзисторной схемой 7; 12 И-НЕ. В таком виде устройство применимо для работы с электроприводами, выполненными по оптимальной структуре экскаваторного электропривода. Схемы управления электроприводов могут быть реализованы как на элементах универсальной блочной системы регуляторов, так и на магнитных усилителях. Эффект изобретения заключается в том, что простыми средствами, с применением достаточно грубых и надежных средств измерения положения ковша относительно стре-. лы, обеспечивается более надежная защита стрелы экскаватора-драглайна, действие которой не влияет на его управляемость. При этом защита позволяет вблизи стрелы не только снизить опасность работы, но и частично автоматизировать ее и тем самым сократить потери при авариях и простоях на ремонт и повысить производительность экскаватора, особенно в ночное времяили в условиях плохой видимости. Формула изобретения Устройство защиты стрелы экскаваторадраглайна от растяжки, содержащее датчик положения ковша, подключенный ко входу блока сравнения с уставкой, командоаппарат привода подъема, привод тяги, включающий командоаппарат, последовательно включенные звено ограничения и регулятор тока., выход которого подключен к системе управления преобразователя, отличающееся
тем, что, с целью повышения надежности защиты, увеличения производительности и маневренности экскаватора, оно снабжено подключенным к одному из входов звена Ограничения привода тяги, регулятором то ка СТОггорений привода тяги, соединённым, с регулятором тока привода тяги регулятором ограничения ЭДС преобразователя привода тяги, двумя ключами, логическим элементом И, диодным вентилем, подклю- . чённым к выходам коМандоаппаратов приводов подъема и тяги блоком управления ограничением ЭДС и датчиком динамического тока привода тяги, выход которого через последовательно соединенные диодный вентиль и один из ключей соединен с друтим входом звена ограничения привода тяги
и с выходом блока сравнения, соединенного со входом регулятора тока стопорения привода тяги и через один из входов логического элемента И и второй ключ подключен к выходу командоаппарата привода подъема и ко входу регулятора ограничения ЭДС, а ко второму входу логического элемента И подключен выход блока управления ограничением ЭДС. -.
Источники информации, принятые во внимание при экспертизе
1.Авторское свидетельство СССР № 215807, кл. Е 02 F 3/48, 1963.
2.Авторское свидетльство СССР № 383795, кл. Е 02 F 3/48, 1969.
3.Авторское свидетельство СССР
№ 202281, кл. Н 02 Р 5/00, 1966 (прототип).
| название | год | авторы | номер документа |
|---|---|---|---|
| Устройство защиты стрелы от растяжки ковша экскаватора-драглайна | 1977 |
|
SU777157A1 |
| Устройство управления электроприводом тяги экскаватора-драглайна | 1981 |
|
SU956697A1 |
| СПОСОБ КОНТРОЛЯ И РЕГУЛИРОВАНИЯ ЗАГРУЗКИ ПРИВОДА ОДНОКОВШОВОГО ЭКСКАВАТОРА В ЭКСПЛУАТАЦИОННЫХ РЕЖИМАХ И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2008 |
|
RU2376422C1 |
| Система стабилизации натяжения подъемного каната экскаватора-драглайна | 1979 |
|
SU876888A1 |
| Способ управления электроприводом одноковшового экскаватора и устройство для его осуществления | 1988 |
|
SU1629423A1 |
| Способ управления драглайном и устройство для его осуществления | 1986 |
|
SU1421836A1 |
| Устройство выбора слабины подъемных канатов экскаваторов-драглайнов | 1980 |
|
SU939674A1 |
| Устройство для управления копающим механизмом экскаватора | 1976 |
|
SU613037A1 |
| Система стабилизации натяжения подъемного каната экскаватора-драглайна | 1990 |
|
SU1768720A1 |
| Устройство для управления экскаватором типа прямая лопата | 1985 |
|
SU1364669A1 |
Si
а.
2/
52
6,
Фи.2.2
