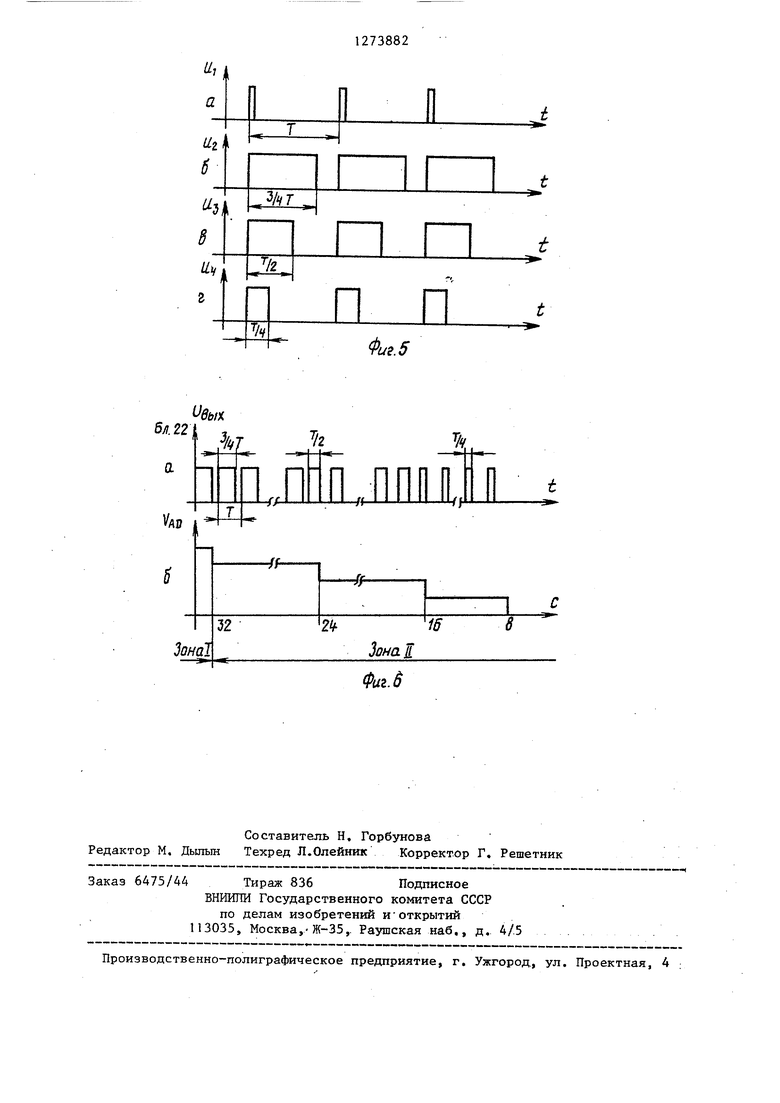
Изобретение относится к автоматике и вычислительной технике и может быть использовано, например, в системах контроля радиолокационнык устройств, Цель изобретения - повышение быстродействия системы. На фиг, представлена Структурная схема предлагаемого устройстваJ на фиг. 2 - функциональная схема ком мутатора; на фиг. 3 - функциональные схемы генератора импульсов и-селектора; на фиг, 4 - диаграмма размещения зон управления; на фиг. 5 - эпюры импульсных сигналов генератора импульсов; на фиг, 6 - эпюры выходных сигналов селектора и с.оответствующие им значения скорости электродвигателя (эд). Система для программного управления (фиг. 1) содержит первый привод 1, состоящий из блока 2 управления шаговым двигателем и шагового двигателя 3, второй привод 4, состоящий из блока 5 управления электродвигателем и электродвигателя 6, редуктор 7 селектор 8, датчик 9 угловых перемещений,, блок 10 ввода программы, блок 11 сравнения, сумматор 12, первый преобра зователь 13 кодов, коммутатор 14, перв элемент ИЛИ 15 (п разрядная группа элементов И) первый элемент ИЛИ 16, второй элемент ИЛИ 17, второй элемент И 18 (п-разрядная группа элементов и), синхронизатор 19, второй преобразователь 20 кодов, генератор 21 импульсов, выход 22 системы (выходной вал редуктора). Коммутатор 14 содержит (фиг. 2) третьи элементы Е 23 26, третьи элементы ИЛИ 27 и 28, первые D-триггеры 29 и 30, четвертые элементы И 31 - 34, четвертые элементы ИШ1 35 и 36, вторые D-триггеры 37 и 38 и пя тые элементы И 40 Генератор импульсов 21 (фиг. З) содержит три формирователя 41, 42 .и 43 и пульсов, Селек-тор 8 (фиг, 3) содержит шес тые элементы И 44, 45 и 46, седьмые элементы И 47 - 50, пятые элементы №Ш 51 и 52, шестой элемент ШШ 53 дешифратор 54. Коммутатор 14 (фиг. 2) обеспечив ет выбор и направление вращения исполнительных двигателей 3 и 6, Вхо дящие в коммутатор 14 элементы И 23 26, ИЛИ 27 и триггеры 29 и 30 участ вуют при формировании управления электродвигателем 6и шаговым двигателем 3 при больших рассогласованиях. Входящие в коммутатор 14 элементы И 31- 34, ИЛИ 35 и 36, TpiirrepH 37 и 38 и элементы И 39 и 40 обеспечивают формирование сигналов управления обоими двигателями в зоне малых рассогласований , Первым входом коммутатора 14 являются сигналы: С - 16352, С 32 и зона I с выхода первого преобразователя 13 кодов, вторым входом - импульс 3 такта синхронизатора 19, третьим входом - импульс 2 такта синхронизатора 19, четвертым входом - сигнал и А : Б с выхода блока сравнения 13 и пятым входом - 14 разрядов кода С с выхода сумматора 12. Генератор импульсов 21 (фиг. 3) обеспечивает формирование трех им-; пульсных сигналов. Он состоит из трех формирователей импульсов 41, 42 и 43. Выходы которых являются выходами генератора 21. Запуск формирователей 41, 42 и 43 производится импульсами 1 такта синхронизатора 19. На временной диаграмме (фиг. 5) приведены эпюры входных и выходных сигналов а - импульсы 1 такта генератора 21 синхронизатора 19 с периодом следования Т;.6, в, т - выходные сигналы формирователей 41 ., 42 и 43 соответственно. ., . . Селектор 8 обеспе-чнвает выбор и подачу на второй элемент И 18 одного из четырех сигналов в зависимости от значения разрядов (5р, 4р) кода С с выхода сумматора 12 и сигналов , С & 16352 с выхода преобразователя 13 кодов. Импульсные сигналы с выхода генератора 21 импульсов поступают на элементы И 44, 45 и 46 (фиг. 3) На элемент И 44 поступает импульс дли3тельностью с -т- Т, на элемент И 45 1 и1-тупъс длительностью о - -т 1, а на -- 2 i, элемент И 46 - импульс длительностью 1 Т. Включение соответствующего элемента И 44, 45 и 46 производится сигналами с выхода дешифратора 54, На вход дешифратора 54 поступает прямой код С, если С 32 и обратный код С, если С 5 16352. Если 1 присутствует на выходе преобразователя 13 кода, топрямой код с поступает на вход деши фратора 54 через элементы И 47 и 49, IfflH 51 и 52, Если. на выходе С 16352, то обратный код С поступает на вход дешифратора 54 через элементы И 48 и 50, ИЛИ 5Г и 52. Если на выходах С , С 16352 О, то элементы И 47 - 50 закрыты и на входах 1 и 2; дешифратора 54 О Сигналы с выхода элементов И 44, 45 и 46 поступают через элемент ИЛИ 53 на первый вход блока 18« Устройство работает следующим образом. По команде от блока ввода програм мы блоки 2 и 5 управления управляют соответственно вращением электродвигателя 6 и шагового двигателя 3 по зонам, устанавливая через дифференциал редуктора 7 .(по наикратчайшему пути) нагрузку в угловое положение, соответствующее команде с последующей автоматической фиксацией положения этой нагрузки. Текущая информация об угловом положении нагрузки снимается в виде цифрового кода с датчика 9 и затем поступает на вторые входы блока 11 сравнения и сумматор I2 через второй преобразователь 20 кодов. Работа последнего синхронизируется первым импульсным сигналом синхронизатора 19. Если обозначить, например, 14-раз рядный двоичный код блока 10 ввода программы, поступающий.на.первые входы блока JJ сравнения, и сумматора 12 через А, а 14-разрядньш код текущего- положения нагрузки через Б, то сигналы, формируемые блоком 1I сравнения, поступающие на вход сумматора 12 и на четвертый вход коммутатора 14, можно записать в следующей форме БОЛЬПШ при , МЕНЫПЕ при А.Б. В сумматоре 12 определяется абсолютная величина разности С: С АБ и она ле5кит в пределах О Сё 16383 14-разрядный код С с выхода сум. матора 12 поступает на вход первого преобразователя 13 кодов. 14-й старший разряд кода С поступает на один из входов коммутатора 14. 4-й и 5-й разряды кода С поступают на вход селектора 8. Диапазон изменения С разбит на две зоны управления.(фиг; 4): зона I 32 -S С : 16352; зона II 16352 г С 32, В зоне I отработка заданного воздействия производится обоими двигателями одновременно, при этом электродвигатель 6 работает в релейном режиме. В зоне II отработка заданного воздействия производится обоими двигателями так же одновременно, но при этом электродвигатель 6 работает в режиме пгиротно-импульсной модуляции. Выделение зоны управления в диапазоне изменения С производится в первом преобразователе 13 кодов. С выхода преобразователя 13 сигнал соответствующей зоны поступает на первый вход коммутатора 14 и на третий вход селектора 8. На первом вьгходе коммутатора 14 фиксируется сигнал управления электродвигателем 6 в зоне I, на втором выходе - сигнал управления шаговым двигателем 3 .в зоне 11, а на третьем выходе - сигнал управления электродвигателем 6 в зоне II. Синхронизатор 19 формирует на своих выходах пачки импульсов. Импульс 1-го такта с частотой f 5,28 кГц синхронизирует работу второго преобразователя 20 кодов и генератора 21 импульсов. Импульс 2го такта синхронизатора 19 с частотой f, 5,28 кГц, задержанный относи- . тельно импульса J-ro такта на 2 мкс, синхронизирует работу коммутатора 14, а импульс 3-.ro такта с частотой f 330 Гц, сдвинутьй относительно импульса 2-го такта на 2 мкс, поступает на второй вход коммутатора 14 и на вход первого элемента И 25, Частота f 5,28 кГц обусловлена скоростью вращения выходного вала 22 системы: Y + -тг + -у ЬБ пр VUD скорость выходного вала; скорости двигателей 6 и v,BV 3, приведенные соответственно к выходному валу системы. Частота f 330 Гц обусловлена астотой работы шагового двигателя Л. Указанная выше расстановка импульных сигналов необходима для раздеения во времени работы второго реобразователя 20 кода, коммутатора 51 14, первого элемента И 15 и генератора 21 импульсов. Рассмотрим работу системы последовательно, по зонам. В зоне- I коммутатор 14 по первому выходу формирует сигнал управления электродвигателем 6. Этот сигнал по шине Движение ЭД против часовой стрелки или по шине Движение ЭД (фиг, 2) поступо часовой стрелке ИЛИ 17 на вход пает через элемент блока 5 управления, приводит выходИмпульсы 3 такта ной вал в движение. синхронизатора 19 поступают на вход элемента И 15 и на вход блока 2 унравления через Т-ШИ 16 Выходной вал шагового двигателя 3 начинает вращаться в ту же сторону, что и электродвигатель б. В момент перехода системы из зоны I в зону II прекращается управление электродвигателя 6 от коммутатора 14 а шагового двигателя 3 от первого элемента И 15. В зоне II коммутатор 14 по второму выходу формирует сигналы управления шаговым двигателем 3, которые поступают на вход блока 2 управления через элемент ИЛИ 16 и шаговый двигатель 3 поворачивает выходной вал системы в том же направлении. Одновременно с третьего выхода коммутатора 14 на вход второго элемента И 18 поступает сигнал ЭД по часовой стрелке или ЭД против часовой стрелки. Бал двигателя б.продолжает вращаться в ту же сторону, что и вал шагового двигателя 3, но при этом .скорость вращения выходного вала дви гателя б зависит от значения кода С. Изменение скорости вращения вала электродвигателя 6 производится за счет импульсного управления.. Импульсные сигналы вырабатываются в генераторе. 21 импульсвв. Далее в селекторе 8 происходит выбор требуемой длительности импульсных сигналов. Им пульсные сигналы с выхода селектора 8 поступают на второй вход второго элемента И1Ш 17 через второй элемент И 18.... На фиг. бб приведены эпюры скорости электродвигателя б в. зависимости от.длительности импульсных сигналов управления, которые формируются на выходе селектора 8 {фиг. ба). В таблице приведены относительные длительности импульсных сигналов уп26авления электродвигателя б в функии значения кода С; Из таблицы видно, что длительность мпульсных сигналов определяется коом С сумматора 12 и сигналами зоны ервого преобразователя 13 кода. Одновременная работа электродвигателя б в режиме широтно-импульсной моодуляции и пошаговая работа двигатея 4 позволяют в зоне II использовать суммарные скоростные качества двигателей, а также обеспечить устойчиость с.истемы и автоматическую фиксацию углового положения выходного вала. Формула изобретения Система для программного управления, содержащая первьш привод, состоящий из последовательно соединенных блока управления шаговым двигателем и.шагового двигателя, второй привод, состояшлй из последовательно соединенных блока управления электродвигателем и .электродвигателя, редуктора, кинематически связанного первым входом с выходом шагового двигателя вторым входом - с выходом электродвигателя, а выходом - с датчиком угловых перемещений и свыходным валом системы, блок ввода программы, подключенный выходом к певрому входу блока сравнения и к первому входу сз мматора, соединенного выходом с входом первого преобразователя кодов и с информационным входом коммутатора, вторым входом - с выходом второго преобразователя кодов и с вторым входом блока сравнения, а тре тьим входом - с выходом блока сравне ния и с первым управляющим входом коммутатора, соединенного вторым управляющим входом с первым выходом синхронизатора, третьим управляющим входом - с вторым выходом синхронизатора и с первым входом первого элемента И, четвертым управляющим входом - с выходом первого преобразо вателя кодов, первым выходом - с вто рым входом первого элемента И и с . первым входом второго элемента HJIIi, а вторым выходом - с первым входом первого элемента ИПИ, подключенного вторым входом к выходу первого элемента И, а выходом - к входу первого привода, система также содержит второй элемент. И, подключенный выходом к второму входу второго элемента ИЛИ, связанного выходом с входом второго привода, причем выход датчика угловых перемещений соединен с первым входом второго преобразователя кодов, связанного вторым входом с третьим выходом синхронизатора, о тличающаяся тем, что, с целью повьшения быстродействия, в нее введены генератор импульсов и селектор, подключенный первым входом к выходу первого преобразователя кодов, вторым входом - к входу первого преобразователя кодов, третьим входом - к выходу генератора импульсов, а выходом - к первому входу второго элемента И, соединенного вторым входом с третьим выходомкоммутатора, а вход генератора импульсов связан с третьим выходом синхронизатора.
| название | год | авторы | номер документа |
|---|---|---|---|
| Система программного управления | 1982 |
|
SU1022116A1 |
| Система программного управления | 1979 |
|
SU894679A1 |
| Устройство для монтажа магнитной видеозаписи | 1986 |
|
SU1429164A1 |
| Устройство для управления асинхронным электродвигателем | 1989 |
|
SU1663734A1 |
| СПОСОБ КОНТРОЛЯ КАЧЕСТВА ОБЪЕКТИВА И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 1995 |
|
RU2078360C1 |
| Устройство для измерения частоты радиоимпульсных сигналов | 1976 |
|
SU641358A1 |
| Устройство для регистрации индикаторных диаграмм поршневых машин | 1988 |
|
SU1597634A1 |
| Устройство для монтажа магнитной видеозаписи | 1983 |
|
SU1137530A2 |
| Цифровой следящий электропривод | 1981 |
|
SU1008703A1 |
| МОНОИМПУЛЬСНАЯ РЛС | 2004 |
|
RU2267137C1 |

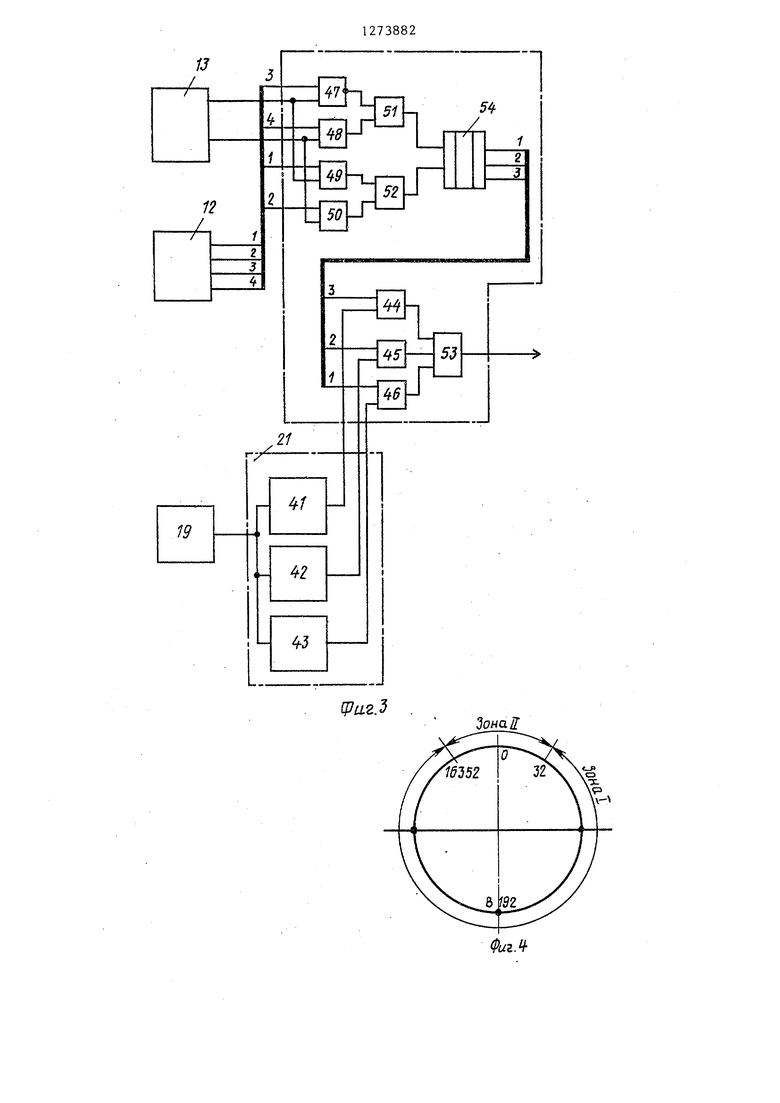
Изобретение относится к области автоматики и вычислительной техники и может быть использовано, например, в системах контроля радиолокационных устройств. Цель изобретения - повышение быстродействия системы. Система содержит первый привод 1, состоящий из блока 2 управления шаговым двигателем и шагового двигателя 3, второй привод-4, состоящий из блока 5 управления электродвигателем и электродвигателя 6, редуктор 7, се лектор 8, датчик 9 угловых перемещений, блок 10 ввода программы, блок 11 сравнения, сумматор 12, первый преобразователь 13 кодов, коммутатор 14, первый элемент 15 И (п - разряд.ная группа элементов И), первый элемент ИЛИ 16, второй элемент ИЛИ 17, второй элемент И 18 (п .- разрядная группа элементов И), синхронизатор 19, второй преобразователь 20 кодов, генератор 21 импульсов. Введение генератора импульсов, селектора и соответствующих фзшкциональных связей (Л позволяет достичь поставленную цель. 7 ил.
fpuz.l
(Риг.з
ЗонаЗ:
Фиг.$
| Система программного управления | 1979 |
|
SU894679A1 |
| Кипятильник для воды | 1921 |
|
SU5A1 |
| Система программного управления | 1982 |
|
SU1022116A1 |
| Кипятильник для воды | 1921 |
|
SU5A1 |
