Изобретение относится к области автоматики и вычислительной техники и может быть использовано например, в системах контроля радиолокационных устройств. Известна система программного управления, содержащая блок ввода программы, анализатор кодов, блок управления шаговым двигателем, шаговый двигатель, датчик угловых перемещений, преобразователь кода, генератор опорного сигнала и синхронизатор 1 . . Недостатком этой системы является низкое быстродействие. Наиболее близкой по назначению и технической сущности к изобретению является система программного управления, которая содержит блок ввода программы, анализатор кодов, первый (шаговый) привод,включающий в себя блок управления шаговым двигателем (,БУ1ЧД и шаговый двигатель (ЬЩ), второй (аналоговый) привод, включающий в себя блок управления аналоговым двигателем (ВУАД) и аналоговый двигатель (АД), редуктор с дифференциалом, датчик угловых перемещений ,(ДУП), первый и второй преобразователи кодов,.коммутатор и синхронизатор. Известное устройство работает сле дующим образом. По кодовой команде от блока ввода программы БУДД и БУШД управляют соот ветственно вращением АД и ЩД по зонам, устанавливая через редуктор нагрузку в угловое положение, соответствующее кодовой команде, с последу ющей автоматической фиксацией положе ния этой нагрузки. Программная инфор мация от блока ввода программы посту пает на первые входы анализатора кодов и сумматора. Текущая информаци об угловом положении нагрузки снимается в виде цифрового кода с ДУП и поступает на вторые входы анализатора кодов и сумматора через первый пр образователь кодов. Работа последнего синхронизируется первым импульсным сигналом синхронизатора. На выходе сумматора формируется двоичный код, равный разности програм мы и текущего значения кода углового положения нагрузки, а на выходе ана лизатора формируется знак разности ко дов программы и текущего положения нагрузки. Код разности с выхода сумматора поступает на вход второго преобразователя кода, где формируются сигналы зоны управления. Сигнал зоны управления, старший разряд кода разности и знак разности поступают на соответствующие ёходы коммутатора. В зависимости от зоны управления и величины разности кодов коммутатор формирует сигналы управления АД или ЩД При больших рассогласованиях отработка производится АД, при малых - Щ.2 Известная система программного управления обеспечивает высокую точность обработки входного сигнала, однако быстродействие ее недостаточно. Целью изобретения является повышение быстродействия системы программного управления при сохранении высокой точности отработки входного сигнала. Поставленная цель достигается тем, что в систему программного управления, содержащую первый и второй приводы, кинематически связанные через дифференциал редуктора с выходом системы, последовательно соединенные блок ввода программы, анализатор кодов, сумматор, первый преобразователь кода и коммутатор, вторыми входами подключенный к первым выходам синхронизатора, второй выход которого соединен с первым входом второго преобразователя кода, вторым входом подключенного к выходу датчика угловых перемещений, а выходом - к второму входу анализатора кода и к второму входу сумматора, третий вход которого соединен с первым выходом блока ввода программ, а выход - с третьим входом коммутатора, четвертый вход которого подключен к выходу анализатора кода, введены триггер, первый дешифратор, первый блок совпадения, подключенный выходом через первый блок элементов ИЛИ к первому приводу, первым входом - к первому выходу синхронизатора, вторым входом - к первому выходу коммутатора и через второй блок элементов ИЛИ - к второму приводу; а также последовательно соединенные счетчик импульсов, второй дешифратор и второй блок совпадения, выход которого соединен с вторым входом второго блока элементов ИЛИ, второй вход второго блока совпадения через триггер подключен к выходу первого блока совпадения к первому суммирующему входу счетчика
Э1022
импульсов, второй суммирукмций вход которого через первый дешифратор подключен к первому входу второго дешифратора и к выходу первого преобразователя кода, первый вычитаюи ий вход счетчика импульсов подключен ковторому выходу коммутатора и к в торному вхо ду первого блока элементов ИЛИ, второй вычитающий вход счетчика импульсов подключен к выходу второго ю дешифратора,-установочный вход счетчика подк/ючеи к второму выходу блока ввода программы, а выход - к входу первого дешифратора.
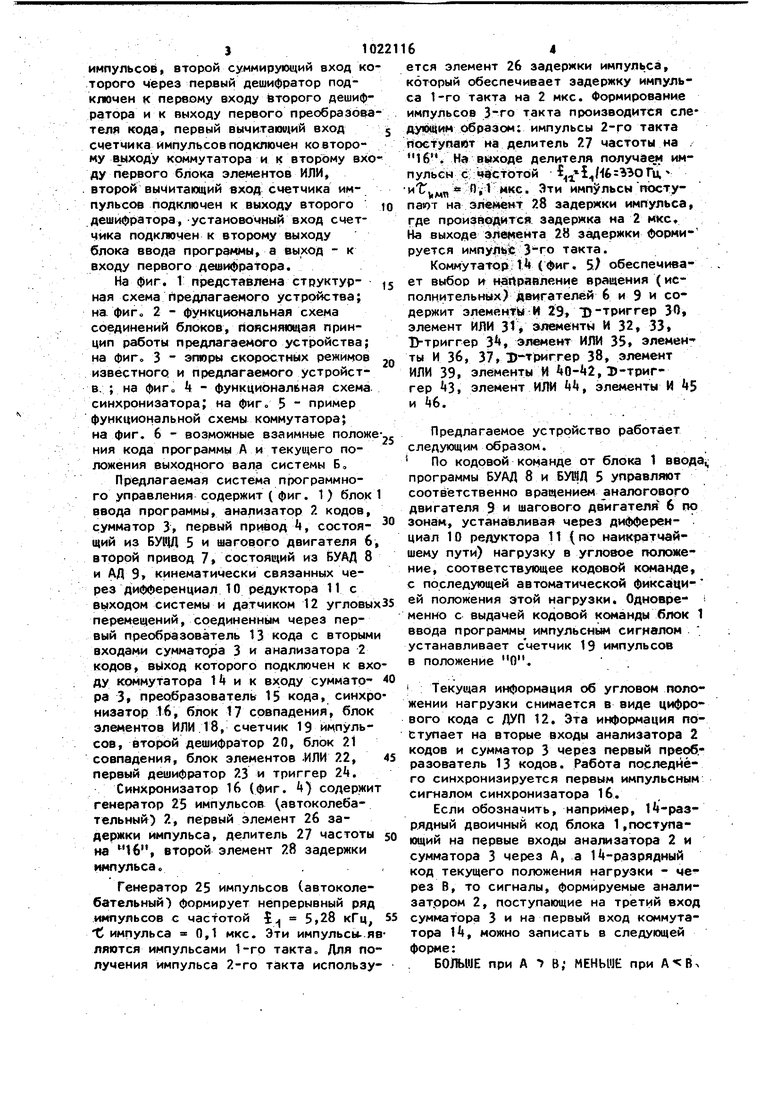
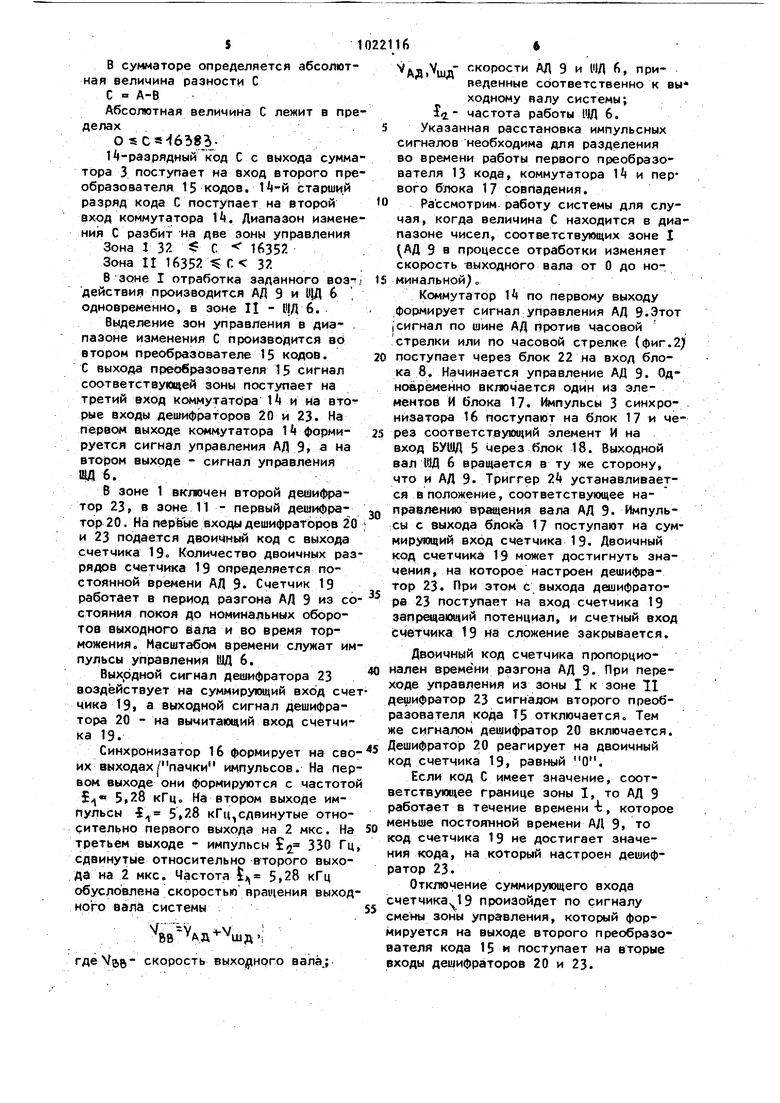
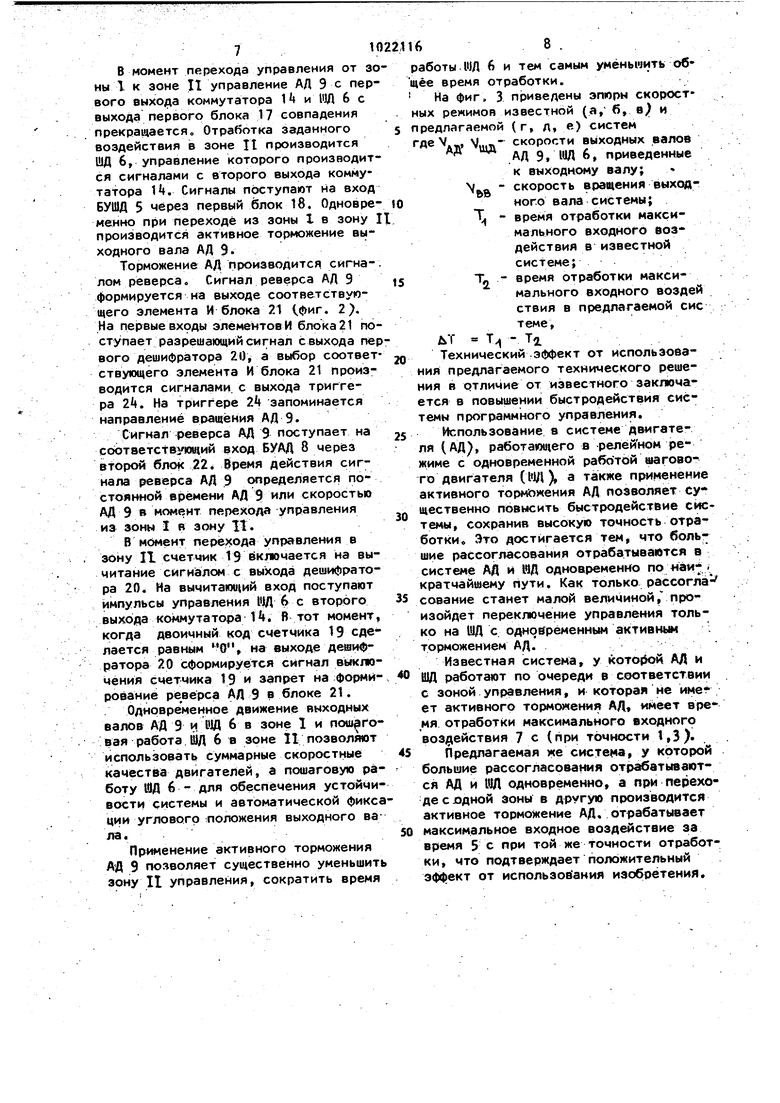
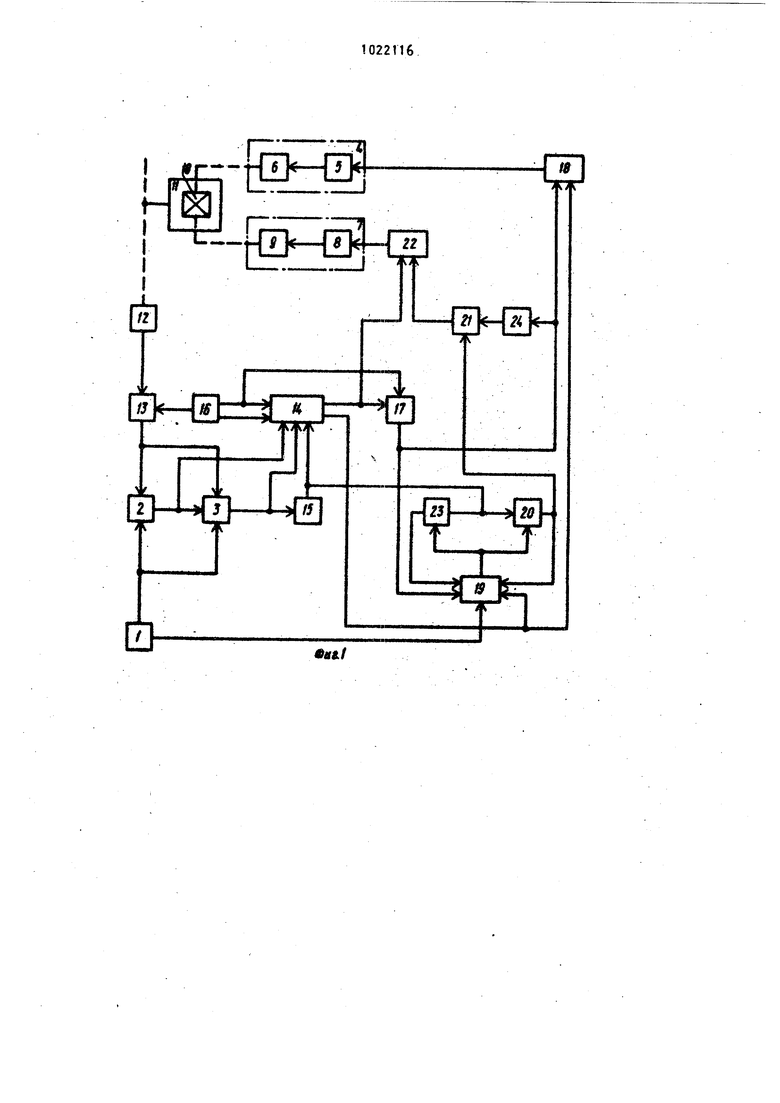
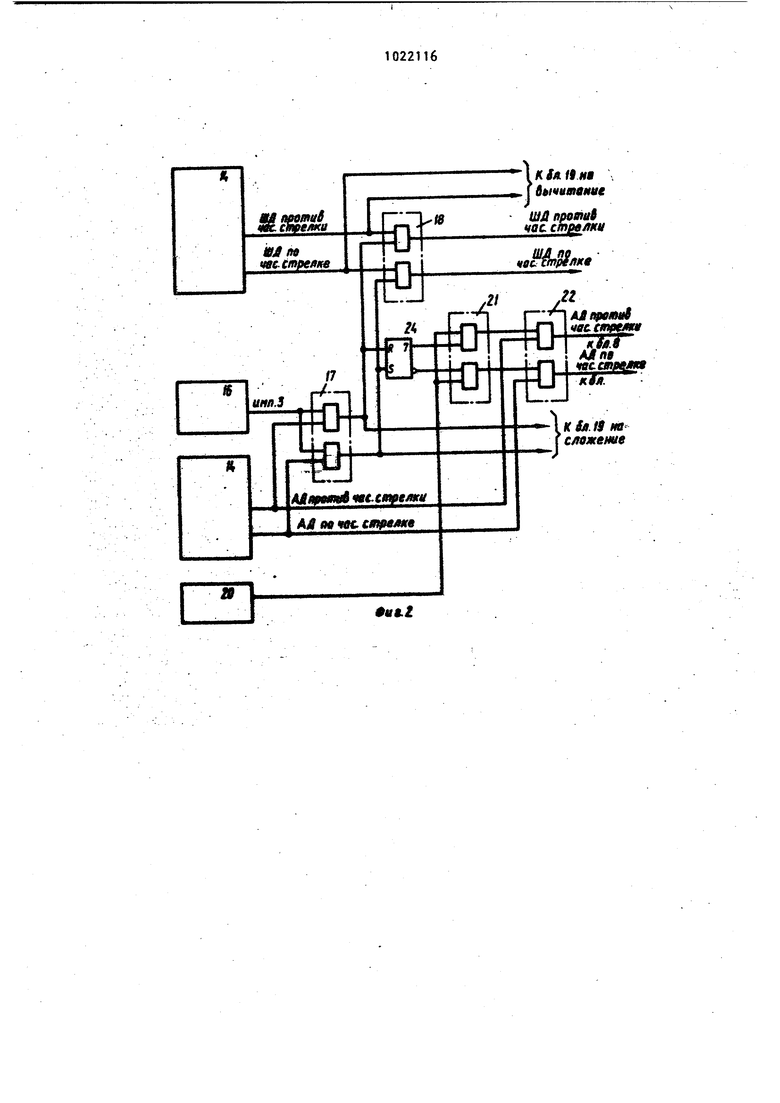
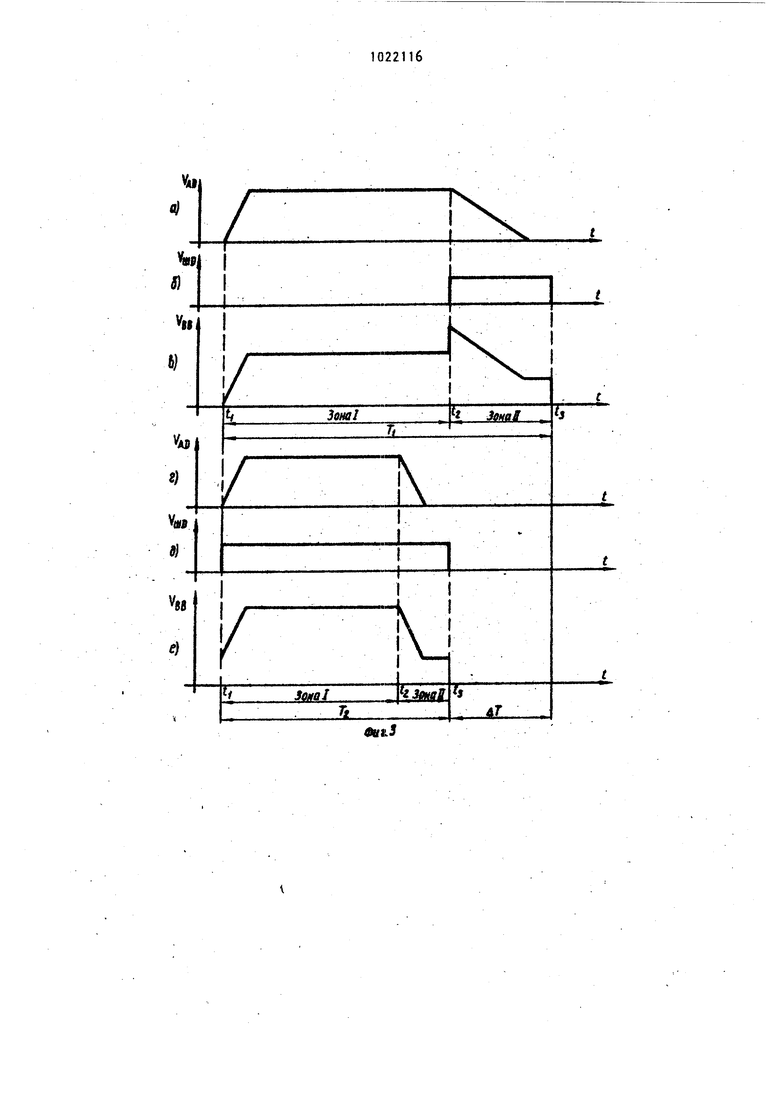
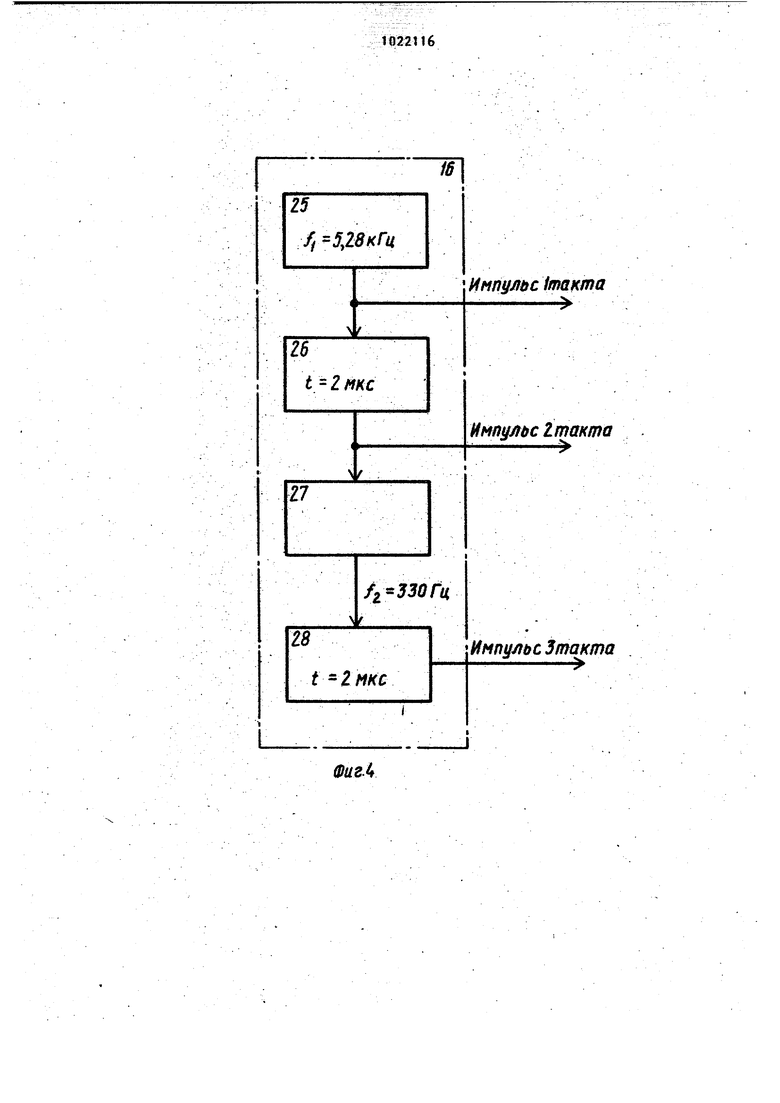
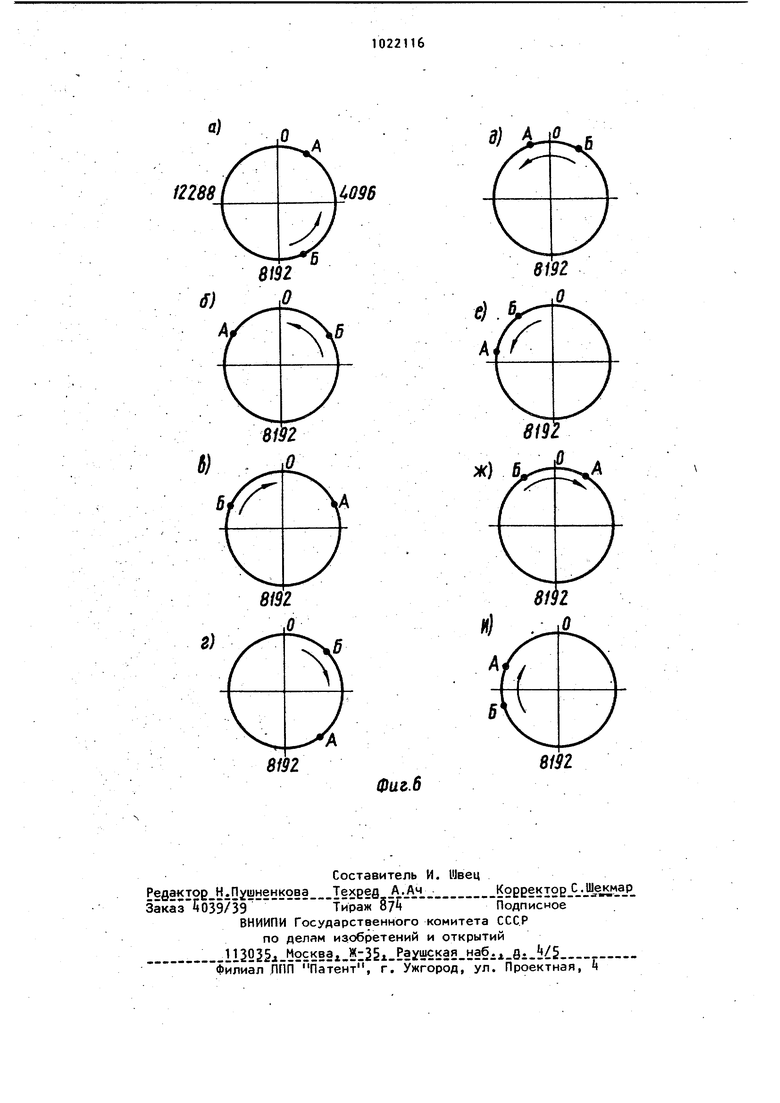
На фиг. 1 представлена структур- 5 ная схема предлагаемого устройства; на. фиго 2 - функциональная схема соединений блоков, Поясняющая принцип работы предлагаемс о устройства; на фиго 3 - эгиоры скоростных режимов -п известного и предлагаемого устройства; на фиго k - функциональная схема, синхронизатора; на фиг 5 пример функциональной схемы коммутатора; на фиг. 6 - возможные взаимные положе-.. ния кода программы А и текущего положения выходного вала системы Б,
Предлагаемая система программного управления содержит ( фиг. 1) блок 1 ввода программы, анализатор . кодов, сумматор 3, первый привод Л, состоящий из БУЩД 5 и шагового двигателя 6, второй привод 7 состоящий из БУАД 8 и АЛ Э, кинематически связанных через дифференциал 10 редуктора 11с выходом системы и датчиком 12 угловыхЗЗ перемещений, соединенным через первый преобразователь 13 кода с вторыми входами cyMMaTojJa 3 и анализатора 2 кодов, въ)ход которого подключен к входу ксжмутатора 1 и к входу сумма то- 40 ра 3 преобразователь 15 кода, синхронизатор 16, блок 17 совпадения, блок элементов ИЛИ.18, счетчик 19 импульсов, второй дешифратор 20, блок 21 совпадения, блок элементов -ИЛИ 22, 45 первый дешифратор 23 и триггер 2А.
Синхронизатор 16 (фиг. ) содержит генератор 25 импульсов автоколебательный) 2, первый элемент 26 задержки импульса, делитель 27 частоты so на 16, второй элемент 28 задержки импульса.. ,
Генератор 25 импульсов (автоколебательный) формирует непрерывный ряд импульсов с частотой $ 5,28 кГц, 55 С импульса 0,1 МКС. Эти импульсы..являются импульсами 1-гр такта. Для получения импульса 2-го такта использу164
ется элемент 26 задержки импульса, который обеспечивает задержку импульса 1-го такта на 2 мкс. Формирование импульсов Зго такта производится еледу10|Д(4м образом: импульсы 2-го такта г рстуйают на делитель 27 частоты на , На BiitxoAe делителя получаем импульсы с чистотой 5j i 6:B3oru, и1Г. д flvl МКС. Эти импульсы поступают на элемент 28 задержки импульса, где произврд йтся задержка на 2 мкс. На выходе эНемента 28 задержки формируется импу. Это такта.
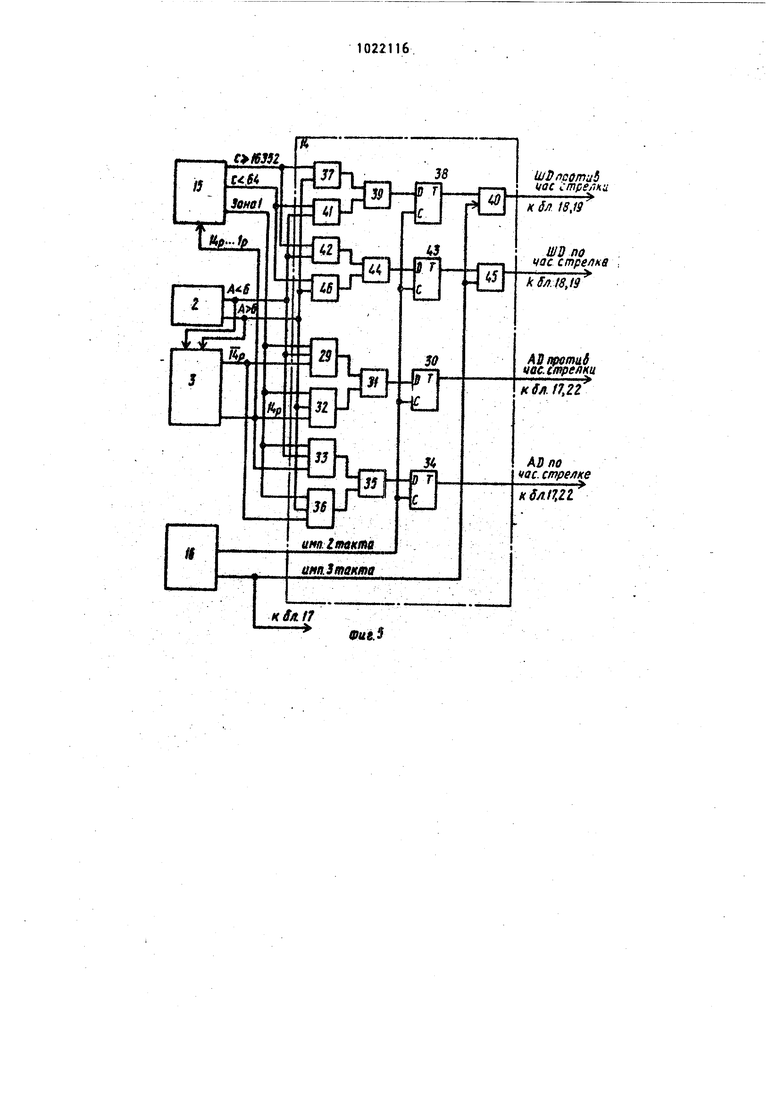
Коммутатор; И (фиг. S.) обеспечивает выбор и направление вращения (исполнительных) Двигателей 6 и 9 и содержит элемен1гы -И 29, 1) -триггер 30 элемент ИЛИ 31 Э.пементы И 32, 33 Т)-триггер 3, элемент ИЛИ 35. элемен ты И 36, 37, Э-Триггер 38, элемент ИЛИ 39, элементы И , 3)-триггер 3, элемент ИЛИ , элементы И kS и .
Предлагаемое устройство работает следующим образом.
По кодовой команде от блока 1 ввода программы БУАД 8 и БУШД 5 управляют соответственно вращением аналогового двигателя 9 и шагового двигателя 6 по зонам, устанавливая через дифферен- . циал 10 редуктора 11 ( по наик|затчайшему пути) нагрузку в угловое положение, соответствующее кодовой команде, с последующей автоматической фиксацией положения этой нагрузки. Одновременио с выдачей кодовой команды блок 1 ввода программы импульсным сигналом . устанавливает счетчик 19 импульсов в положение О.
i Текущая информация об угловом положении нагрузки снимается в виде цифрового кода с ДУП 12. Эта информация поступает на вторые входы анализатора 2 кодов и сумматор 3 через первый преобразователь 13 кодов. Работа последйёго синхронизируется первым импульсным сигналом синхронизатора 16.
Если обозначить, например, Ij-pasрядный двоичный код блока 1,поступающий на первые входы анализатора 2 и сумматора 3 через А, а 14-разрядный код текущего положения нагрузки - че рез В, то сигналы, формируемые анализатрром 2, поступающие на третий вход сумматора 3 и на первый вход коммутатора kf можно записать в следующей форме:
БОЛЬШЕ при А В; МЕНЬШЕ при
В сумматоре определяется абсолютная величина разности С
С А-В
Абсолютная величина С лежит в пределах
0«Св 6385Н-разрядный код С с выхода сумматора 3 поступает на вход второго преобразователя 15 кодов. Ij-ft старший разряд кода С поступает на второй вход коммутатора 1. Диапазон изменения С разбит на две зоны управления
Зона 1 32 S5 С 1635.
Зона и 1635. $ Г 32
В зоне I отработка заданного воз-; действия производится АД 9 и ЩД 6 одновременно, в зоне II - ИД 6.
Выделение зон управления в диа , пазоне изменения С производится ed втором преобразователе 15 кодов. С выхода преобразователя 15 сигнал соответствующей зоны поступает на третий вход коммутатора k и ta вторые входы дешифраторов 20 и 23. На первом выходе коммутатора I формируется сигнал управления АД 9 5 на втором выходе - сигнал управления ВД 6.
В зоне 1 включен второй дешифратор 23, в зоне 11 - первый дешифратор 20. На перёГые входы дешифраТЪррв 20 и 23 подается двоичный код с выхода счетчика 19. Количество двоичных разрядов счетчика 19 определяется постоянной времени АД 9. Счетчик 19 работает в период разгона АД 9 из состояния покоя до номинальных оборотов выходного вала и во время тор можениЯо Масштабом времени служат импульсы управления ШД 6.
Выхрдной сигнал дешифратора 23 воздействует на суммируииций вход счет чйка 19 а вьгходной сигнал дешифратора 20 - на вычитающий вход счетчика 19.
Синхронизатор 16 формирует на своих выходах | пачки импульсов. На первом выходе они формируются с частотой « кГц. На втором выходе импульсы 5 кГц,сдвинутые относительно первого выхода на 2 мкс. На третьем выходе - импульсы 5. 330 Гц, сдвинутые относительно второго выхода на 2 МКС. Частота 5, кГц обусловлена скоростью вращения выходного ваяй системы
гдеЧав- скорость выхорнрго вала.;
.шд скорости АД 9 и ищ 6, приведенные соответственно к вы ходному валу системы; ч- частота работы Щ 6. 5 Указанная расстановка импульсных сигналов необходима для разделения во времени работы первого преобразователя 13 кода, коммутатора I и первого блока 17 совпадения.
О Рассмотрим.работу системы для случая, когда величина С находится в диапазоне чисел, соответствующих зоне I АД 9 в процессе отработки изменяет скорость выходного вала от О до но1S минальной)о
Коммутатор И по первому выходу формирует сигнал управления АД 9.Этот сигнал по шине АД против часовой стрелки или по часовой стрелке (фиг.2)
0 поступает через блок 22 на вход блока 8, Начинается управление АД 9. Од ноарёменно включается один из эле«(внтов И блока 17. Импульсы 3 синхронизатора 16 поступают на блок 17 и через соответствуюи|ий элемент И на вход БУШД 5 через блок 18. Выходной вал ШД 6 вращается в ту же сторону, что и АД 9. Триггер 2 устанавливается в положение, соответствующее наQ правлению вращения вала АД 9- Импульсы с выхода блока 17 поступают на суммир шщий вход счетчика 19. Двоичный код счетчика 19 может достигнуть значения, на которое настроен дешифратор 23. При этом с выхода дешифраторе 23 поступает на вход счетчика 19 запродающий потенциал, и счетный вход счетчика 19 на сложение закрывается.
Двоичный код счетчика пропорционален в ремени разгона АД 9. При переходе управления из зоны I к зоне Ц дешифратор 23 сигналом второго преобразователя кода Т5 отключается. Тем же сигналом дешифратор 20 включается. 5 Дешифратор 20 реагирует на двоичный код счетчика 19, равный О.
Если код С имеет значение, соответствующее границе зоны I, то АД 9 работает в течение времени-Ь, которое Q меньше постоянной времени АД 9, то код счетчика 19 не достигает значения сода, на который настроен дешифратор 23.
Отключение суммирующего входа счетчика, 19 произойдет по сигналу смены зоны управления, который формируется на выходе второго преобразователя кода 15 и поступает на вторые входы дешифраторов 20 и 23. 71 В момент перехода управления от з ны 1 к зоне II управление АД 9 с пер вого выхода коммутатора и Щ 6 с выхода первого блока 17 совпадения прекращается Отработка заданного воздействия в зоне Ц производится ШД 6, управление которого производит ся сигналами с второго выхода коммутатора I. Сигналы поступают на вход БУШД 5 через первый блок 18. Одновре менно при переходе из зоны 1 в зону производится активное торможение выходного вала АД 9. Торможение АД производится, сигналом реверса. Сигнал реверса АД 9 формируется на выходе соответствующего элемента И блока 21 (фиг. 2). На первые входы элементов И блока 21 по ступает разрешающий сигнал с выхода пе вого дешифратора 20; а выбор соответ ствующего элемента И блока 21 производится сигналами, с выхода триггера 2k. На триггере 2 запоминается направление вращения АД 9. Сигнал реверса АД 9 поступает на co Jтвeтctвiющий вход БУАД 8 через вtopoй блок 22 Время действия сигнала реверса АД 9 определяется постоянной времени АД 9 или скоростью АД 9 в момент перехода управления из зоны I в зону 11. В момент перехода управления в зону II счетчик 19 включается на вычитание сигналом с выхода дешифратора 20. На вычитащий вход поступают импульсы управления Щ 6с второго выхода коммутатора I. В тот момент, когда двоичный код счетчика 19 сделается равным на выходе дешифратора 20 сформируется сигнал выключения счетчика 19 и запрет на формированиё ре верса АД 9 в блоке 21. Одновременное движение выходных валов АД 9 и. иШ 6 в зоне I и пош горая работа.ШД 6 а зоне II позволяют использовать суммарные скоростные качества двигателей, а пошаговую работу ШД 6 - для обеспечения устойчивости системы и автоматической фикса ции углового положения выходного вала. Применение активного торможения Afl 9 позволяет существенно уменьшить зону II управления, сократить время 68 . работы ШЛ 6 и тем самым умёныиить общее время отработки. На фиг, 3 приведены эпюры скоростных режимов известной (а,б, в и предлагаемой (г, л, Р-) систем В ша скорости выходных валов АД щд АД 9t 1иД 6, приведенные к вмходнсжу валу; .- - скорость вращения ВЫХОДDOного вала системы; время отработки максимального входного воздействия в известной cиcteмe; Т„ - время отработки максимального входного воздей ствия в предлагаемой сие теме, Т Т - Ti Технический .эффект от использования предлагаемого технического решения в отличие от известного заключается в повышении быстродействия системы программного управления, Использование в системе двигателя (АД, работающего в -релёйном режиме с одновременной работЬй шагового двигателя (Щ а также применение активного торможения АД позволяет су щественно повысить быстродействие системы, сохранив высокую точность отработки. Это достигается тем, что большие рассогласования отрабатываются в системе АД и ЙД одновременно по нам- ; кратчайшему пути. Как только рассогла сование станет малой величиной ,nроизойдет пе включение управления только на ЫД с одновременным активным ; торможением АД. Известная система, у которой АД и Щ работают по очереди в соответствии с зоной управления, и которая не име ет активного то|то чения АД, имеет ере мя отработки максимального входного воздействия 7 с (при точности 1,3 ). Предлагаемая же система, у которой большие рассогласования отрабатываются АД и ШД одновременно, а при переходе с ддной зоны в другую производится активное торможение АД. отрабатывает максимальное входное воздействие за время 5с при той же точности отработки, что подтверждает положительный эффект от использое(ания изобретения. €.сареме11
АЛ м «N:. сллмдуе дьтитамие ШЛ npoatttt час, стилки к {л. 19 на с/пжение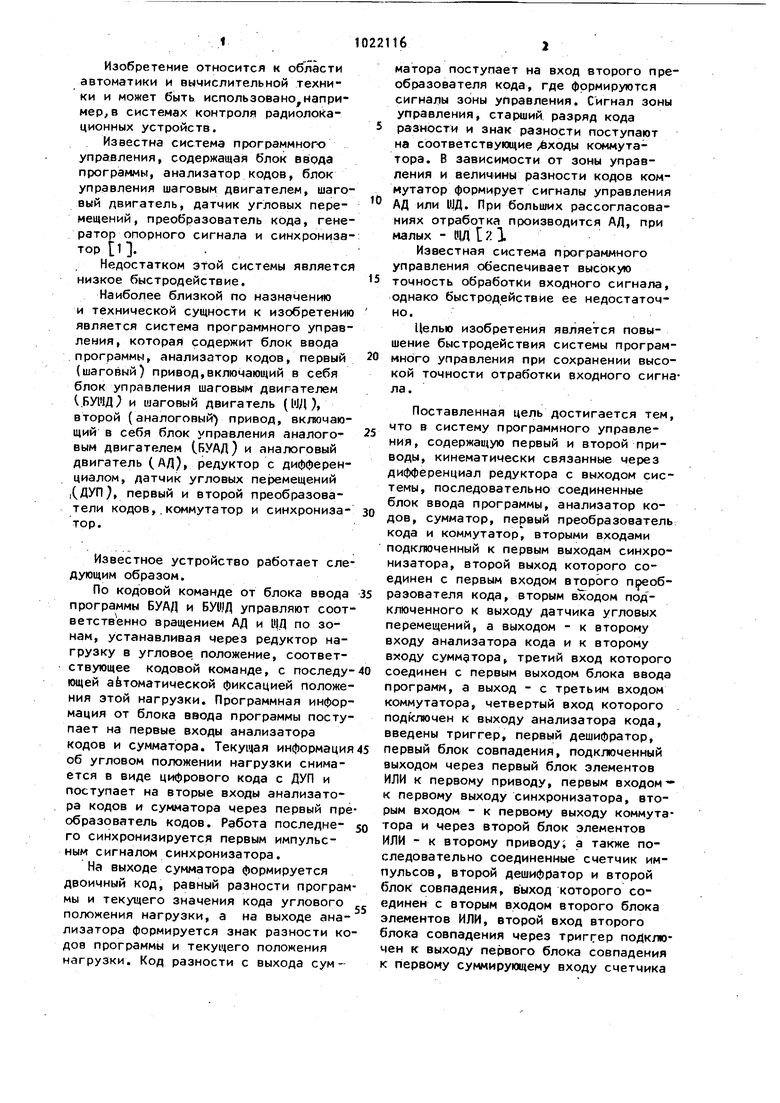
| название | год | авторы | номер документа |
|---|---|---|---|
| Система программного управления | 1979 |
|
SU894679A1 |
| Система для программного управления | 1985 |
|
SU1273882A1 |
| Устройство автоматизированной подготовки программ для станков с ЧПУ | 1986 |
|
SU1354160A1 |
| Устройство для воспроизведения видеосигнала | 1987 |
|
SU1555918A1 |
| Устройство для программного управления намоточным оборудованием | 1984 |
|
SU1273879A2 |
| Устройство для программного управления технологическим оборудованием | 1986 |
|
SU1372277A1 |
| МНОГОКАНАЛЬНЫЙ АНАЛОГО-ЦИФРОВОЙ ПРЕОБРАЗОВАТЕЛЬ | 1973 |
|
SU384115A1 |
| Устройство для контроля видеосигнала | 1982 |
|
SU1069190A1 |
| Система адаптивного числового программного управления металлорежущим станком | 1980 |
|
SU954945A1 |
| Программируемое устройство для контроля цифровых систем | 1986 |
|
SU1439588A1 |
СИСТЕМА ПРОГРАЖНОГО УПРАВЛЕНИЯ, содержащая первый и второй приводы, кинема тически связанные через дифференциал редуктора с выходом системы, последовательно соединеннь е блок ввода программы, анализатор кодов, сумматор, первый преобразователь кодаи коммутатор, вторыми входами подключенный к первым выходам синхронизатора, второй выход которого соединен с первым входом второго.преобразователя кода, вторым входом подключенного к выходу датчика угловыУ перемещений, а.выходом - к второму входу анализатора кода и к второму входусумматора, третий вход которого соединен с первым выходом блока ввода программ, а выход - с третьим входом коммутатора, четвертый вход которого подключен к выходу анализатора кода, отличающаяся тем, что, с целью повышения быстродействия системы, в нее введены триггер, первый дешифратор, первый блок совпадения,.подклоченный выходом черё первый блок элементов ИШ к первому приводуi первым входом - к первому выходу синхронизатора, вторым входом - к первому выходу коммутатора и через второй блок элементов ИЛИ - к второму приводу, а также последовательно соединенные счетчик импульсов, второй дешифратор и второй блок совпадения, выход которого соединен с вторым входом второго блока элементов ИЛИ, второй вход второго блока совпадения . через триггер подключен к выходу перi вого блока совпадения и к первому сл суммирующему входу счетчика импульсов, второй су ируящий вход которого через перюый дешифратор подключен к первому входу второго дешифратора и к выходу первого преобразователя кода, первый вычитаюи)ийвход счетчика импульсов подключен к второму выходу коммутатора и к второму входу первого блока элементов ИЛИ, второй вычитающий вход счетчика.импульсов подключен к выходу tvO второго дешифратора, установочный to вход счетчика подключен к второму выходу блока ввода программы, а выход к входу первого дешифратора. Од
ы.1
Уд|
-5,28кГи
28
t-ZMKC
Фиг4
Импульс1ткта
---- Импульс 1такта
/ ЗЗОГц
Импульс Зтакта
ШВпсгОгпиЬ час cmpsiin-d
кЗл fS.IS
WO по
час стрелке
kSfl 18.19
АВщктиб vac.
квл.П.22
AS по час, стрелке
кблдгг
f2288
096
3)
8192
д) A
8192
Фиг. б
