(5) СИСТЕМА ПРОГРАММНОГО УПРАВЛЕНИЯ

| название | год | авторы | номер документа |
|---|---|---|---|
| Система программного управления | 1982 |
|
SU1022116A1 |
| Система для программного управления | 1985 |
|
SU1273882A1 |
| Система сопровождения целей и ракет зенитной боевой машины | 2019 |
|
RU2710994C1 |
| СПОСОБ ОПРЕДЕЛЕНИЯ МОМЕНТА ДОСТИЖЕНИЯ МЕХАНИЧЕСКОГО УПОРА ЭЛЕКТРОПРИВОДОМ С ДВУХОБМОТОЧНЫМ ШАГОВЫМ ДВИГАТЕЛЕМ И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2019 |
|
RU2725619C1 |
| УЛЬТРАЗВУКОВОЙ ДИАГНОСТИЧЕСКИЙ КОМПЛЕКС ДЛЯ ФОРМИРОВАНИЯ И ВИЗУАЛИЗАЦИИ ТРЕХМЕРНЫХ ИЗОБРАЖЕНИЙ | 1997 |
|
RU2125836C1 |
| СИСТЕМА УПРАВЛЕНИЯ ПРИВОДОМ АНТЕННЫ | 1999 |
|
RU2184991C2 |
| АКУСТИЧЕСКИЙ КОМПЬЮТЕРНЫЙ МАММОГРАФ С ТРЕХМЕРНОЙ ВИЗУАЛИЗАЦИЕЙ | 1998 |
|
RU2139679C1 |
| СПОСОБ ОПРЕДЕЛЕНИЯ МОМЕНТА ДОСТИЖЕНИЯ МЕХАНИЧЕСКОГО УПОРА ЭЛЕКТРОПРИВОДОМ С БИПОЛЯРНЫМ ШАГОВЫМ ДВИГАТЕЛЕМ И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2019 |
|
RU2713224C1 |
| УСТРОЙСТВО ИМИТАЦИИ МИШЕННОЙ ОБСТАНОВКИ ТРЕНАЖЕРОВ ДЛЯ ОБУЧЕНИЯ СТРЕЛЬБЕ ИЗ СТРЕЛКОВОГО ОРУЖИЯ И ГРАНАТОМЕТОВ | 2008 |
|
RU2392574C1 |
| Устройство для управления подачей ножевого суппорта лущильного станка | 1988 |
|
SU1676804A1 |

1
Изобретение относится к автоматике и вычислительной технике и предназначено для использования, например, в системах контроля радиолокационных устройств.
Известна система программного управления, содержащая блок ввода программы, коммутатор фаз, блок формирования ошибок, блок задержки, датчик перемещений и шаговый приводfl.
Недостатки этой системы - невысокие точность и быстродействие, причем последнее обусловлено, в частности, малой скоростью вращения вала шагового привода.
Наиболее близкой к предлагаемой является система, программного управления, содержащая включенные поJcлeдoвaтeльнo Ьлок ввода программы и анализатор кодов, привод, кинематически связанный через редуктор с выходом системы и датчиком угловых перемещений, соединенный через преобразователь кода с другим входом
анализатора кодов, генератор опросного сигнала, подключенный выходом к датчику угловых перемещений, и синхронизатор, один выход которого соединен с другим входом преобразователя кода 3.
Известная система обеспечивает высокую точность отработки входного сигнала, однако быстродействие ее мало вследствие малой скорости враtoщения выходного вала шагового привода.
Цель изобретения - повышение быстродействия системы при сохранении высокой точности отработки выISходного сигнала.
Указанная цель достигается тем, что в систему программного управ-пения, содержащую включенные последовательно блок ввода программы и
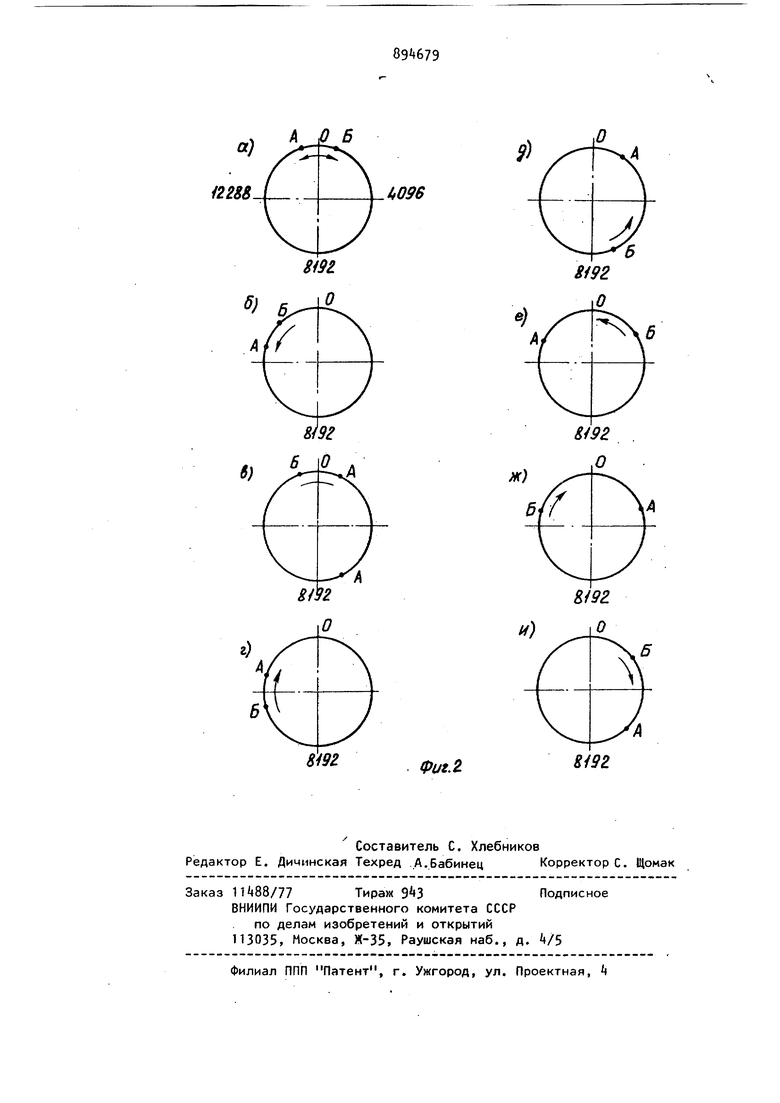
aj анализатор кодов, привод, кинематически связанный через редуктор с выходом системы и датчиком угловых перемещений, соединенный через образователь кода с другим входом а.на лизатора кодов, генератор опросного сигнала, подключенны1 1 выходом к датчику угловых перемещений, и син хронизатор, один выход которого соединен с другим входом преобразователя кода, введены включенные последовательно сумматор, дополнительный пр образователь кода, коммутатор и дополнительный привод, выход которого кинематически связан с редуктором, причем входы сумматора соединены со входами и выходом анализатора кодов, а другие входы коммутатора, другой выход которого подключен ко входу основного привода, соединены с выходами анализатора кодов и сумматора и другим выходом синхронизатора вход которого соединен с выходом дополнительного преобразователя кода. На фиг. 1 показана система, функциональная схема, на фиг, 2 - различные случаи соотно1аенип кодов прог .рамиы и положения вала, Система содер ; ит блок 1 ввода программы, анализатор 2 кодов, блок 3 управления шаговым двигателем (БУЫД) и шаговый двигатель (ШД) k, образующие совместно основной (шаговый) привод, редуктор 5 с дифференциалом 6 датчик 7 угловых перемещений (ДУП), преобразователь 8 кода (основной) , генератор 9 опросного сигнала (ГОС), синхронизатор 10, сум матор 11 - блок вычитания кодов(БВК) дополнительный преобразователь 12 ко да - блок определения зоны управлени (БОЗУ), коммутатор 13 - блок формирования сигналов управления . (БФСУ) и дополнительный привод, образованный блоком 14 управления аналоговым двигателем (БУАД) и названным двигателем (ЛД) 15. Устройство работает следующим образом. По кодовой команде от блока 1 вво да программы БУЛД I и БУШД 3 управляют соответственно вращением аналог вого двигателя 15 и шагового двигателя по зонам, устанавливая через редуктор 5 (по наикратчайшему пути) нагрузку и угловое положение, соответствующее кодовой команде, с пос- ледующей автоматической фиксацией по ложения этой нагрузки. Текущая информации об угловом положении нагрузки снимается в виде цифрового кода с ДУП 7, Эта информаЭция поступает на вторые входы анализатора 2 кодов и блок 11 вычитания кодов (БВК) через преобразователь 8 кодов. Работа последнего синхронизируется первым импульсным сигналом синхронизатора 10, Если обозначить, например, разрядный двоичный код блока 1, поступающий на первые входы анализатора 2 и БВК 11 через А, а разрядный код текущего положения нагрузки через Б, то сигналы, формируемые анализатором 2, поступающие на третий вход БВК 11 и на второй вход БФСУ 13, можно записать о следующей форме: Больше при Меньше при Л Б. В БВК 11 определяется абсолютная величина разности С С А - Б. Абсолютная величина С лежит в пределахО С 16383. разрядный код С с выхода БВК 11 поступает на вход БОЗУ 12, 1+-тый старший разряд кода С поступает на соответствующий вход БФСУ 13. Диапазон изменение кода С разбит на две зоны управления. Зона I . 16128 Зона I 16128 С 256 В зоне I отработка заданного воздействия производится АД 15. В зоне II - ШД 4. Соотношение зон управления I и II является функцией параметров нагрузки, АД 15 и ШД t. Выделение зон управления в диапазоне изменения С производится в БОЗУ 12, На его выходе формируется логическая 1 в случае, если С 7/16128, и логическая 1 в случае, если , , формируются сигналы, соответствующие нахождению кода С в зоне ff В ином случае на выходе блока 12 формируется логическая 1 информирующая о нахождении кода С в зоне 1. При ненахождении кода в зоне 1 в синхронизаторе 10 устанавливается частота следования пачек импульсов f 330 Гц, обусловленная частотой работы ШД . Впротивном случае частота следования пачек импульсов равна f 5 кГц, обусловленная скоростью вращения АД 15 Выбор управления двигателями или 15 и направление вращения производится в БФСУ 13. Работа последнего поясняется фиг.2, где представлены возможные взаимные положения кода программы А и текущего поло чения Б. Случае 1, С 16128 А В На выходе блока 13 формируется импульсный сигнал, который, воздействуя на БУШД 3, за ставит повернуть ШД против часовой стрелки {фиг,2а Случай 2 о С 256 А Б В этом случае сигнал логической 1 также формируется на выходе бло ка 13 аналогично случаю 1(фиг,26). Случай Зо С 5-16128 А Б На выходе блока 13 формируется импульсный сигнал, который вызовет поворот ШД по часовой стрелке (фиг. 2 Случай 4. С .5б А Г) Сигнал логической 1 также форм руется на выходе блока 13. Работа аналогична случаю 3 (фиг,2г). Случай 5. 256 С 8192 А Б Выходной сигнал воздействует на АД 15 через БУАД 1 и заставляет поворачиваться против часовой стрел ки ( фиг, 2р;). Случай 6, 8192 С 1б128 А Б Сигнал логической 1 формируетс на том же выходе блока 13 и работа аналогична 5 (фиг.2е). Случай 7. 819. - С 16128 А В Сигнал логической 1 заставляет АД 15 поворачиваться по часовой стр ке (фиг. 2ж). Случай Во 256 С 8192 А 7 Б Сигнал логической 1 формируетс на том же выходе блока 13 и заставл ет АД 15 поворачиваться по часовой стрелке (фиг. 2и). Управление АД 15 производится БУ 14, а ШД 4 - БУШД 3. Движения выход ных валов ШД 1.И АД 15 складываются в редукторе 5 дифференциалом ,6, По очередная работа ШД и АД 15 позво ет полностью использовать высокие скоростные качества АД 15 и пошагов работу ШД 4 для получения устойчиво ти системы. В качестве аналогового двигателя может применяться, например двигатель постоянного тока о Таким образом, использование в системе аналогового двигателя, работающего в релейном режиме, наряду с шаговым двигателем позволяет существенно повысить быстродействие системы, сохранив высокую точность отработки Это достигается тем, что большие рассогласования обрабатываются в системе АД 15 по наикратчайшему пути. Как только рассогласование станет малой величиной, произойдет перек.лючение управления с АД 15 на ШД . Известная система с одним исполнительным двигателем ( шаговым имеет время отработки максимального входного воздействия 80 с (при точности 1,3%, в то время, как система с двумя двигателями, один из которых шаговый, а другой - аналоговый например двигатель постоянного тока, отрабатывает максимальное входное воздействие за время 7 с при той же точности обработки. Формула изобретения Система программного управления, содержащая включенные последовательно блок ввода программы и анализатор кодов, привод кинематически связанный через редуктор с выходом системы и датчиком угловых перемещений, соединенный через преобразователь кода с другим входом анализатора кодов, генератор опросного сигнала, подключенный выходом к датчику угловых перемещений, и синхронизатор, один выход которого соединен с другим входом преобразователя кода, отличающаяся тем, что, с целью повышения быстродействия системы, она содержит включенные последовательно сумматор, дополнительный преобразователь кода, коммутатор и дополнительный привод, выход которого кинематически связан с редуктором, причем входы сумматора соединены со входами и выходом анализатора кодов, а ругие входы коммутатора, другой выход которого подключен ко входу основного привода, соединены с выходами анализатора кодов и сумматора и другим выходом синхронизатора, вход которого соединен с выходом допол нительного преобразователя кода. , Источники информации, принятые во внимание при экспертизе 1.Авторское свидетельство СССР ff , кл. G 05 В , 1976. 2.Авторское свидетельство СССР №ЗОб7б9,клС 01 В 9/02,1970 прототип .
Фиг.
