Изобретение относится к манипуляторам, работающим в герметизированном объеме (камере), и может быть использовано, например, в качестве , манипулятора подложки электронографа.
Целью изобретения является повышение надежности герметизации.
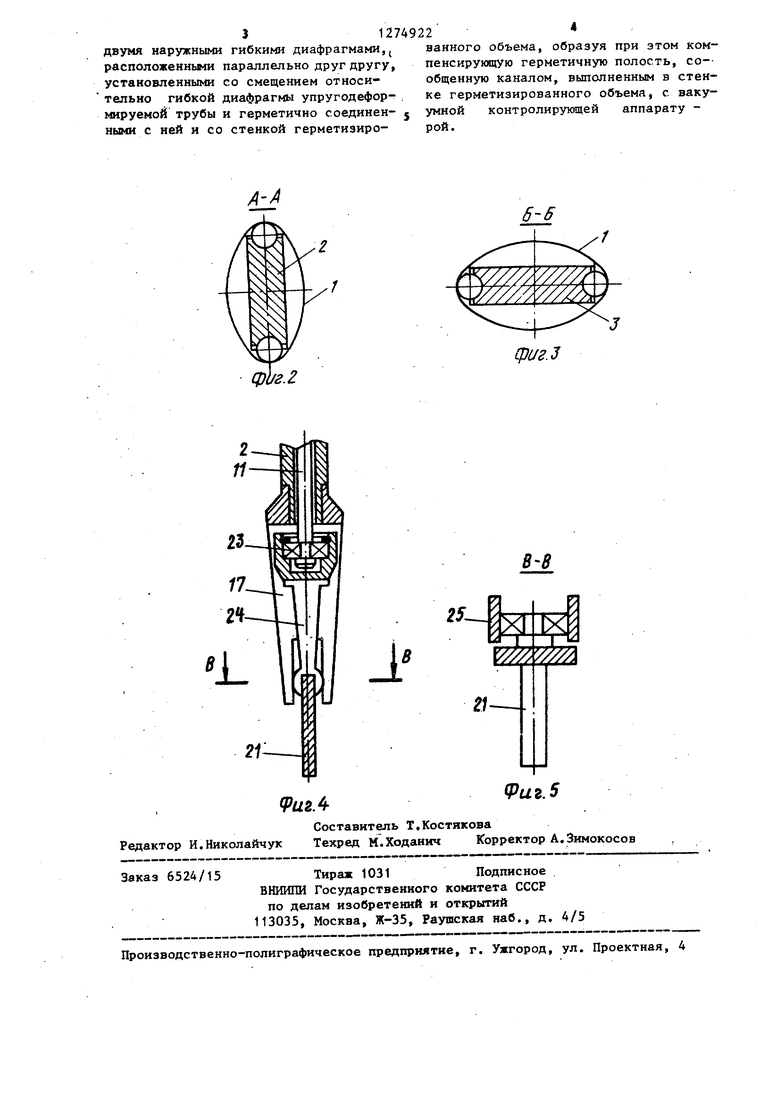
На фиг. 1 показано предлагаемое устройство, общий вид; на фиг. 2 сечение А-А на фиг. 1; на фиг. 3 сечение Б-Б на фиг. 1; на фиг. 4 испытательные механизмы; на фиг,, 5сечение В-В на фиг. 4,
Манипулятор содержит упругодеформируемую трубу 1, которая оДним концом связана с задающим генератором 2 деформации, а другим - с ведомим валом, (генератором) 3 и закреплена одной внутренней 4 и двумя наружньв и 5 и 6 гибкими диафрагмами, которые установлены со смещением относительно внутренней диафраг й 1 4 и герметично соединены с упругодеформируемой трубой 1 и стенкой 7 герметизированного объема (камеры), образуя компенсирующую герметичную полость, подключенную каналом 8 к вакуумно-измерительной контролирующей аппаратуре. На стенке 7 защитного герметизированного объема (камеры), со стороны органов управления манипулятора смонтировано и связано с концентрирующей герметичной полостью через канал 8 измерительно-сигнализирукщее устройство 9. На внутренней диафрагме 4 внутри упругодеформируемой трубы 1 закреплен сильфон .10, к которому герметично приварен шток 11 поступательного движения в герметизированный объем (камеру).
Привод задающего генератора 2 деформации состоит из подшипниковой опоры 12, закрепленной в корпусе 13, и приводного маховичка 14. Шток 11 имеет возможность перемещаться поступательно от винта 15 и при помощи шпонки 16 предотвращает 10 от скручивания.
Исполнительный механизм состоит из поворотного кронштейна 17 с подшипниковой опорой 18, смонтированной на кронштейне 19 подиипниковой опоры 20, в которой установлен объек 21, рычага 22, соединенного с одной стороны при помощи шарнирного соединения и шарикоподшипника 23 со штоком . 1 1 , а с другой стороны - с объектом 21, и (для варианта вращательнопоступательного движения) кронштейна 24 с закрепленным на нем объектом 21, подшипник 25 которого может перемещаться по пазу кронштейна 17.
Все устройство смонтировано на стенке 7 защитного герметизированного объема (камеры).
При вращательно-качательном движении объект 21 получает вращение от задающего генератора 2 через упругодеформируемую трубу 1, закрепленную на одной внутренней 4 и двух наружных 5 диафрагмах, ведомый вал 3
и кронштейн 17, а качание его осуществляется рычагом .22, связанным через подшипник 23 со штоком 11 поступательного движения.
При вращательно-поступательном
движении объект 21 получает поступательное движение от кронштейна 17, связанного со штоком 11. При этом разрежение воздуха в компенсирующей герметичной полости контролируется
измерительно-сигнализирую11р1М устройством 9, следящим: за необходимой степенью разрежения в компенсирукщей герметичной полости и ее герметиза-. цией.
Разнесение одной внутренней и двух наружных гибких диафрагм друг . относительно друга позволяет снять концентрацию напряжений в узлах сопряжения этих диафрагм с упругодеформируемой трубой и образовать герметичную полость между двумя наружными гибкими диафрагмами, а также создать разрежение воздуха в этой полости, компенсирующее перепад давлений в
рабочем и нерабочем пространствах манипулятора„ воздействующих на гибкие диафрагмы герметизирующего элемента. 1
Контроль за разрежением воздуха в этой полости позволяет своевременно выявить возможную разгерметизацию манипулятора в случае усталостного разрушения одной из наружных гибких диафрагм.
Формула изобретения
Манипулятор, работающий в герметизированном объеме, по авт.св. № 274561 , отличающийся
тем, что, с целью повышения надежности герметизации, он снабжен вакуумной контролирующей аппаратурой и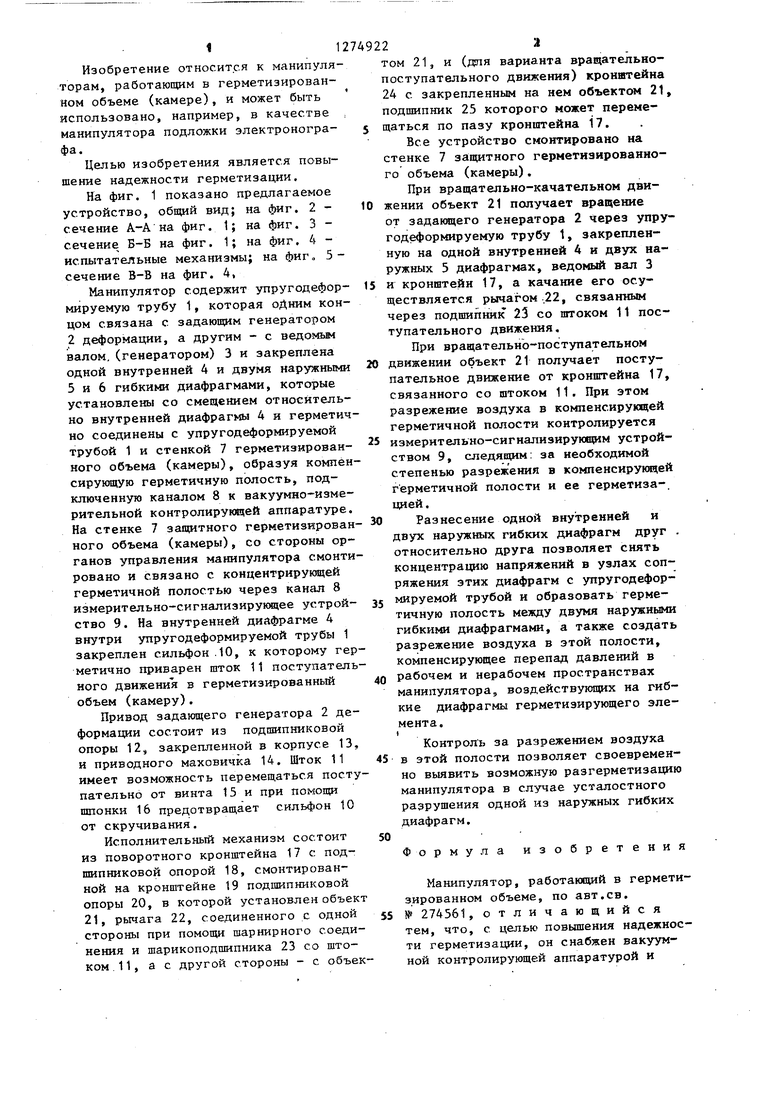
| название | год | авторы | номер документа |
|---|---|---|---|
| Манипулятор, работающий в герметизированном объёме | 2018 |
|
RU2688075C1 |
| Вакуумный манипулятор | 2018 |
|
RU2691168C1 |
| ПЕРЕМЕШИВАЮЩЕЕ УСТРОЙСТВО | 2018 |
|
RU2691343C1 |
| Перемешивающее устройство | 2018 |
|
RU2686143C1 |
| Вакуумный манипулятор | 2018 |
|
RU2691173C1 |
| МАНИПУЛЯТОР С ВАКУУМНОЙ КАМЕРОЙ | 2018 |
|
RU2713999C1 |
| МАНИПУЛЯТОР, РАБОТАЮЩИЙ В ГЕРМЕТИЗИРОВАННОМ ОБЪЕМЕ | 2019 |
|
RU2728274C1 |
| МАНИПУЛЯТОР, РАБОТАЮЩИЙ В ГЕРМЕТИЗИРОВАННОМ ОБЪЕМЕ | 2018 |
|
RU2708648C1 |
| МАНИПУЛЯТОР, РАБОТАЮЩИЙ В ГЕРМЕТИЗИРОВАННОМ ОБЪЕМЕ | 2019 |
|
RU2709280C1 |
| Манипулятор | 1990 |
|
SU1787761A1 |
Изобретение относится к манипуляторам, работающим в герметизированном объеме. Цель изобретения - повышение надежности герметизаций. Наружные гибкие диафрагмы 5 и 6 устагг новлены со смещением относительно внутренней гибкой диафрагмы 4 и герметично соединены с упругодеформируемой трубой 1 и стенкой 7 герметизированного объема (камеры), образуя компенсирующую герметичную полость, сообщенную каналом 8 с вакуумной контролирующей аппаратурой 9. Это позволяет снять концентрацию напряжений в узлах сопряжений диафрагм 5 и 6 с упругодеформирувмой трубой 1, а также создать разряжение воздуха в полости, компенсирующее перепад давлений в рабочем и нерабочем пространствах манипулятора, воздейству-г 3 (Л И1ЦИХ на гибкие диафрагьвл. Контроль за разряжением воздуха в полости позволяет своевременно выявить возможную разгерметизацию манипулятора в случае усталостного разрушения одной КЗ наружных гибких диафрагм.3 ил. /5 ND 1 О N0 to к го 4)41.1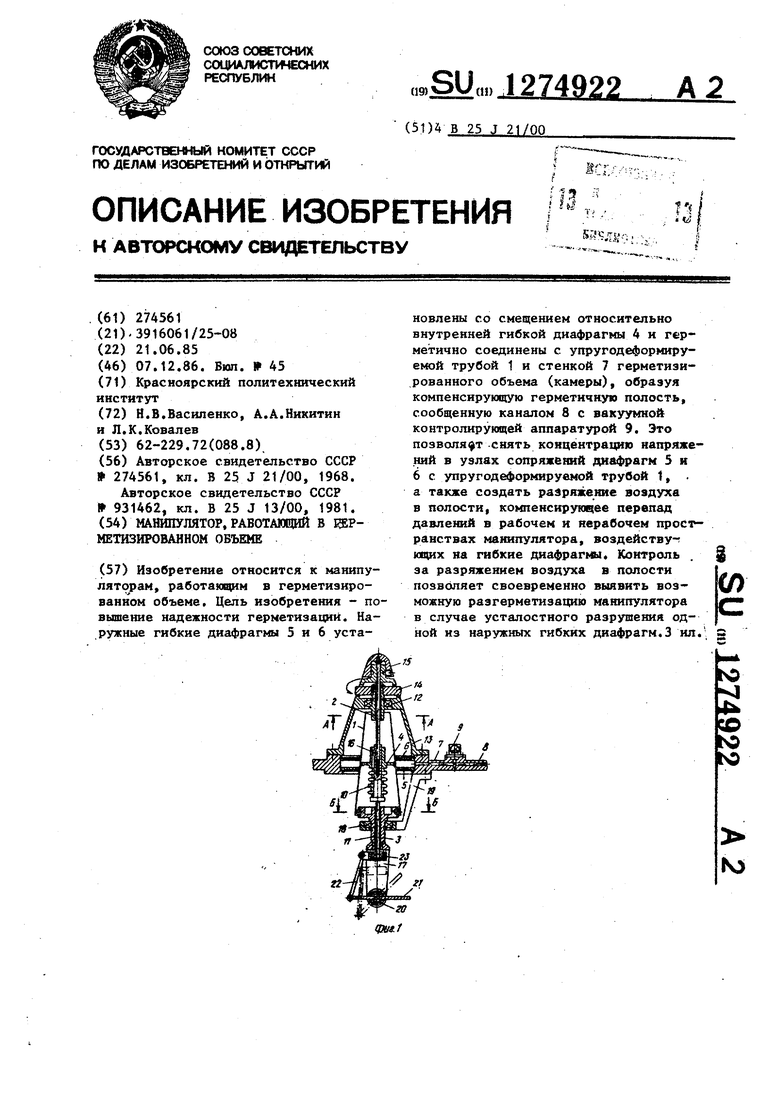
| МАНИПУЛЯТОР; РАБОТАЮЩИЙ в ГЕРМЕТИЗИРОВАННОМОБЪЕМЕ | 0 |
|
SU274561A1 |
| кл | |||
| Видоизменение пишущей машины для тюркско-арабского шрифта | 1923 |
|
SU25A1 |
| Промышленный робот | 1980 |
|
SU931462A1 |
| Видоизменение пишущей машины для тюркско-арабского шрифта | 1923 |
|
SU25A1 |
