Предполагаемое изобретение относится к манипуляторам, работающим в герметизированном объеме, и может быть использовано, например, в качестве манипулятора подложки электронографа, а также является усовершенствованием известного манипулятора, описанного в авт. свид.СССР №274561 и в авт. свид. СССР №1274922.
В основном изобретении по авт. свид. СССР №274561 М. кл. В25J 21/00 и в дополнительном изобретении по авт. свид. СССР №1274922 М. кл. В25J 21/00 описан манипулятор, работающий в герметизированном объеме, содержащий корпус, в котором смонтированы привод поступательного движения исполнительного органа в виде винтового механизма и связывающего его с исполнительным органом штока с сильфонным компенсатором, привод вращательного движения исполнительного органа в виде задающего генератора, ведомого генератора и связующей их упруго-деформируемой трубы, закрепленной на гибкой диафрагме, отделяющей рабочее пространство манипулятора от нерабочего, а также привод качательного движения исполнительного органа в виде системы рычагов, связанных со штоком и исполнительным органом, шток с сильфонным компенсатором установлен внутри упруго-деформируемой трубы привода вращательного движения и закреплен на гибкой диафрагме, вакуумную контролирующую аппаратуру и две наружные гибкие диафрагмы, расположенные параллельно друг другу, установленными со смещением относительно гибкой диафрагмы упругодеформируемой трубы и герметично соединенными с ней и со стенкой герметизированного объема, образуя при этом компенсирующую герметичную полость, сообщенную каналом, выполненным в стенке герметизированного объема, с вакуумной контролирующей аппаратурой.
Недостатками известного манипулятора являются низкие технологические возможности и большие весогабариты, что обусловлено ограниченными параметрами диапазона зоны обслуживания и сложной конструкцией исполнительного органа расположенного в герметизированном объеме и имеющего не менее сложную систему рычагов. Конструкция существующего манипулятора полностью лишена возможности перемещения исполнительного органа во внутрикамерном объеме при обслуживании ряда комплексных операций манипуляционного характера, например, качания обрабатываемого предмета в системе сферических координат телесного угла наклона, относительно обрабатывающего инструмента.
Представленные недостатки существенно сказываются на параметрах кинематической точности и показателях технологических возможностей работы всего манипулятора, а также показателях роста себестоимости и качества выпускаемой продукции.
Целью предполагаемого изобретения является повышение технологических возможностей, уменьшение весогабаритов путем расширения параметров диапазона возможностей зоны обслуживания манипулятора, а также обеспечение телесного угла передачи качательного движения.
Это достигается тем, что известный манипулятор по авт. свид.СССР №274561 и №1274922 снабжен эластичным герметизирующим элементом, расположенным внутри компенсирующей герметичной полости, образованной двумя наружными диафрагмами, установленными со смещением относительно гибкой диафрагмы упругодеформируемой трубы и герметично соединенными с ней и со стенкой герметизированного объема, образуя при этом гибкую эластичную перегородку отделяющую рабочее пространство манипулятора от нерабочего, причем эластичный герметизирующий элемент может быть выполнен из вакуумной или радиационно-стойкой резины, обладающий гибкими свойствами.
Использование в конструкции манипулятора эластичного герметизирующего элемента позволит, при необходимости, совершение качательного движения в герметизированном объеме, производить передачу наклона исполнительного органа манипулятора под нужным телесным углом, при этом надежно герметизируя передачу качательного движения, отделяя рабочее пространство манипулятора от нерабочего.
Такое конструктивное решение значительно расширит параметры диапазона возможностей зоны обслуживания манипулятора, уменьшит его весогабариты, повысит кинематическую точность, что положительно скажется на показателях снижения роста себестоимости, повышения объемов и качестве выпускаемой продукции.
Кроме того, при таком конструктивном решении появляется возможность полностью исключить из конструктивной схемы манипулятора сложную дорогостоящую систему вакуумно-измерительной контролирующей аппаратуры измерительно-сигнализирующего устройства, что резко снизит показатели себестоимости манипулятора и выпускаемой продукции.
Сравнение заявляемого решения не только с прототипом, но с другими техническими решениями не позволило выявить в них признаки, отличающие заявляемое решение от прототипа, что позволяет сделать вывод о соответствии критерию «существенные отличия».
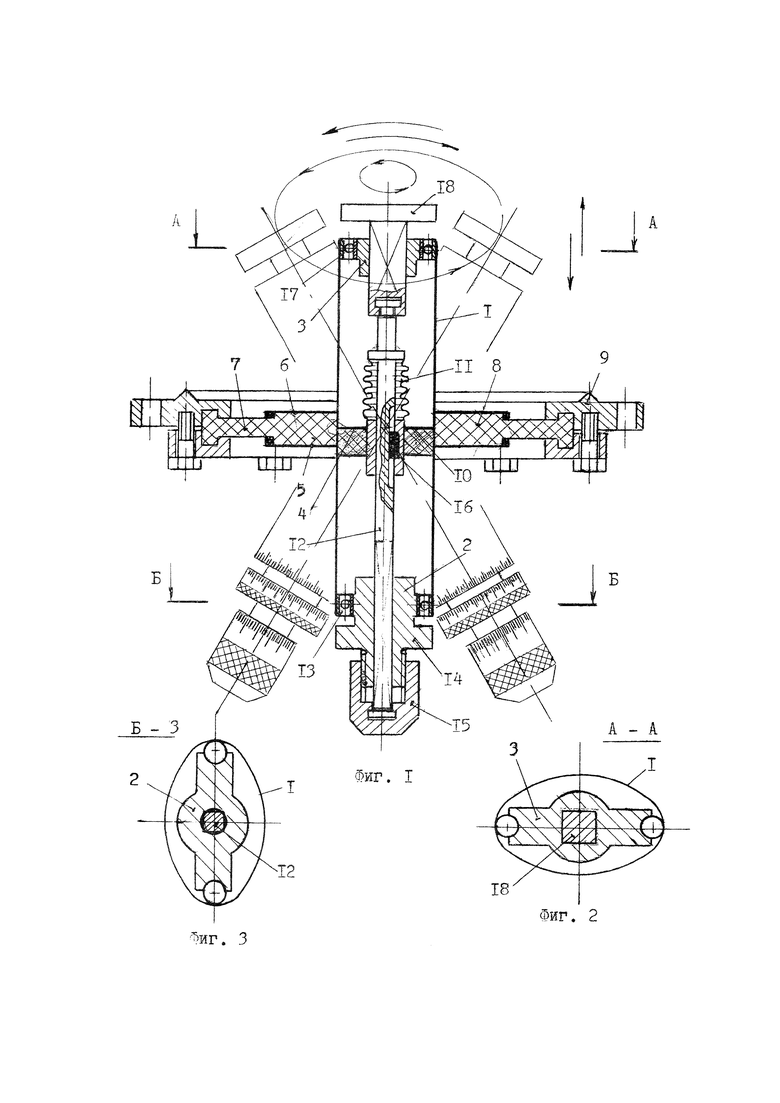
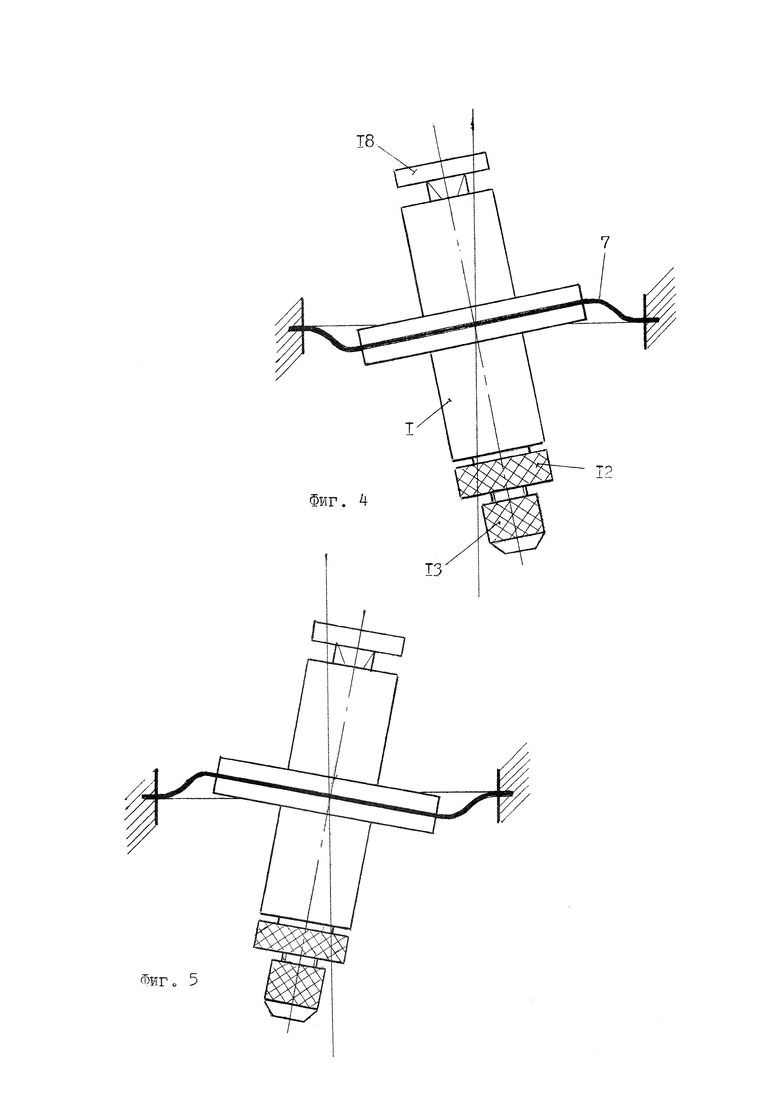
На фиг. 1 фотографии изображен общий вид манипулятора, работающего в герметизированном объеме. На фиг. 2 - разрез А-А на фиг. 1. На фиг. 3 - разрез Б-Б на фиг. 1. На фиг 4 и 5 показана схема работы манипулятора на эластичном герметизирующем элементе.
Манипулятор содержит упругодеформируемую трубу 1, которая одним концом связана с задающим генератором 2 деформации, а другим - с ведомым валом (генератором) 3 и закреплена одной внутренней 4 и двумя наружными 5 и 6 гибкими диафрагмами, которые установлены со смещением относительно внутренней диафрагмы 4 и герметично соединены с упругодеформируемой трубой 1 через эластичный герметизирующий элемент 7, расположены внутри компенсирующей герметичной полости, образованной двумя наружными диафрагмами 5 и 6 со стенкой 8 герметизированного объема (камеры). На внутренней диафрагме 4 внутри упругодеформируемой трубы 1 закреплен сильфон 9, к которому герметично приварен шток 10 поступательного движения в герметизированный объем (камеру).
Привод заданного генератора 2 деформации состоит из подшипниковой опоры 2, закрепленной в трубе 1 вместе с рукоятками привода поступательного 12 и вращательного 13 движения. Шток 10 имеет возможность перемещаться поступательно от винта рукоятки 12 и при помощи шпонки 14 предотвращает сильфон 9 от скручивания.
Исполнительный механизм также закреплен в трубе 1 и состоит из подшипниковой опоры 15, в которой размещен с возможностью поступательного перемещения рабочий столик 16 связанный шарнирно со штоком 10 и рукоятками привода поступательного 12 и вращательного 13 движения.
Все устройство в смонтировано на стенке 8 защитного герметизированного объема (камеры).
Устройство работает следующим образом:
При вращательно-качательном движении объект 16 (рабочий столик) получает вращение от задающего генератора 2 рукоятки привода вращательного 13 движения через упругодеформируемую трубу 1, закрепленную на одной внутренней 4 и двух наружных 5 и 6 диафрагмах внутри которых выполнен эластичный герметизирующий элемент 7, который отделяет рабочее пространство манипулятора от нерабочего и герметизирует передачу качательного движения исполнительному органу манипулятора от органа его управления.
При вращательно-поступательном движении объект 16 (рабочий столик) получает поступательное движение от ведомого генератора 3, связанного со штоком 10 и рукояткой привода поступательного 12 движения.
ТЕХНИКО-ЭКОНОМИЧЕСКОЕ ОСНОВАНИЕ.
Технические преимущества заявляемого технического решения по сравнению с прототипом заключаются в повышении технологических возможностей и уменьшении весогабаритов, путем расширения параметров диапазона возможностей зоны обслуживания манипулятора, что снижает себестоимость и повышает качество выпускаемой продукции.
| название | год | авторы | номер документа |
|---|---|---|---|
| МАНИПУЛЯТОР С ВАКУУМНОЙ КАМЕРОЙ | 2018 |
|
RU2713999C1 |
| Вакуумный манипулятор | 2018 |
|
RU2691173C1 |
| Вакуумный манипулятор | 2018 |
|
RU2691168C1 |
| Перемешивающее устройство | 2018 |
|
RU2686143C1 |
| ПЕРЕМЕШИВАЮЩЕЕ УСТРОЙСТВО | 2018 |
|
RU2691343C1 |
| МАНИПУЛЯТОР, РАБОТАЮЩИЙ В ГЕРМЕТИЗИРОВАННОМ ОБЪЕМЕ | 2018 |
|
RU2708648C1 |
| МАНИПУЛЯТОР, РАБОТАЮЩИЙ В ГЕРМЕТИЗИРОВАННОМ ОБЪЕМЕ | 2019 |
|
RU2709280C1 |
| МАНИПУЛЯТОР, РАБОТАЮЩИЙ В ГЕРМЕТИЗИРОВАННОМ ОБЪЕМЕ | 2019 |
|
RU2728274C1 |
| Манипулятор,работающий в герметизированном объеме | 1985 |
|
SU1274922A2 |
| ШПАГОВЫЙ МАНИПУЛЯТОР | 2018 |
|
RU2718771C1 |
Изобретение относится к манипулятору, работающему в герметизированном объеме, и может быть использовано в качестве манипулятора подложки электронографа. Манипулятор снабжен эластичным герметизирующим элементом, расположенным внутри компенсирующей герметичной полости, образованной двумя наружными гибкими диафрагмами, установленными со смещением относительно внутренней гибкой диафрагмы упруго-деформируемой трубы и герметично соединенными с ней и со стенкой герметизированного объема, образуя при этом эластичную перегородку, отделяющую рабочее пространство манипулятора от нерабочего. В результате обеспечивается повышение технологических возможностей и уменьшение веса и габаритов. 1 з.п. ф-лы, 5 ил.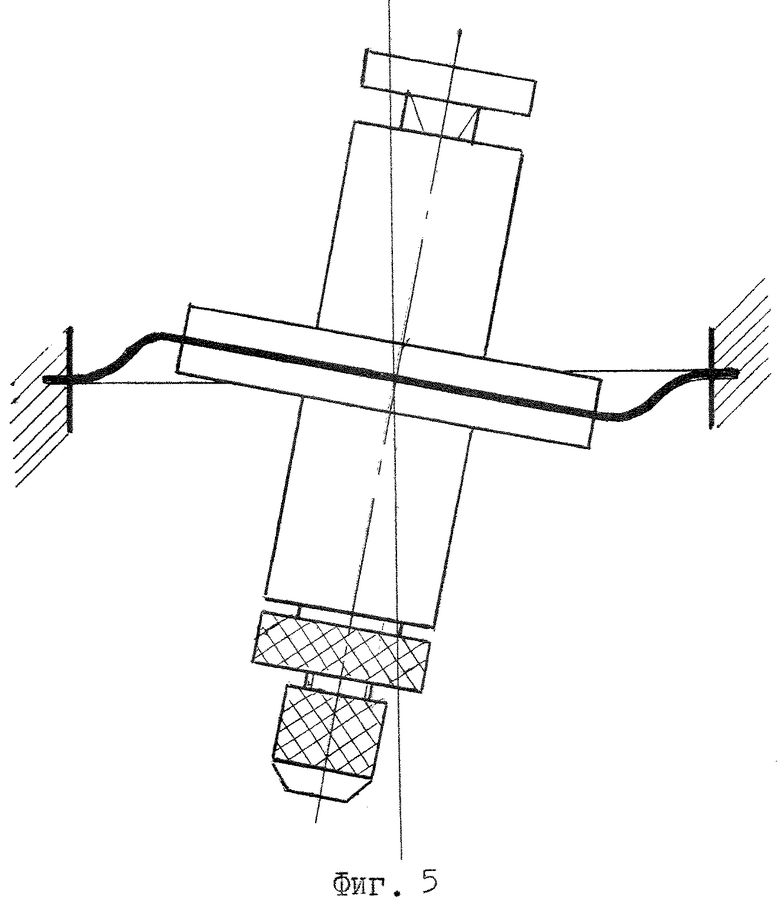
1. Манипулятор, работающий в герметизированном объеме, содержащий упруго-деформируемую трубу, которая одним концом связана с задающим генератором, а другим - с ведомым генератором и закреплена одной внутренней и двумя наружными гибкими диафрагмами, расположенными параллельно друг другу, отличающийся тем, что он снабжен эластичным герметизирующим элементом, расположенным внутри компенсирующей герметичной полости, образованной двумя наружными гибкими диафрагмами, установленными со смещением относительно внутренней гибкой диафрагмы упруго-деформируемой трубы и герметично соединенными с ней и со стенкой герметизированного объема, образуя при этом эластичную перегородку, отделяющую рабочее пространство манипулятора от нерабочего.
2. Манипулятор по п. 1, отличающийся тем, что герметизирующий элемент выполнен из вакуумной или радиационно-стойкой резины.
| Манипулятор,работающий в герметизированном объеме | 1985 |
|
SU1274922A2 |
| МАНИПУЛЯТОР; РАБОТАЮЩИЙ в ГЕРМЕТИЗИРОВАННОМОБЪЕМЕ | 0 |
|
SU274561A1 |
| Манипулятор, работающий в герметизированном объеме | 1990 |
|
SU1785897A1 |
| Манипулятор, работающий в герметизированном объеме | 1989 |
|
SU1604609A1 |
| US 20160368153 A1, 22.12.2016 | |||
| JP 9314485 A, 09.12.1997. | |||

