t
Изобретение относится к машино строению и может быть использовано для автоматизации и механизации вспомогательных технологических операций .
Известен промыишенный робот, содержащий поворотно-подъемную колонну, установленную на основании и несущую связанные между собой руки, выполненные в виде силовых цилиндров, на штоках которых через промежуточные элементы установлены захваты, а также систему управления, тормозные устройства и коммуникации для подвода энергоносителяГП.
К недостаткам известного устройства относятся неудобство и длительность переналадки при изменении размеров заготовок, а также неуправляемость процессом торможения.
Цель изобретения - повышение производительности и расширение технологических возможностей.
Поставленная цель достигается тем, что каждый промежуточный элемент руки выполнен в виде траверсы, один конец которой связан с коммуникацией, выполненной в виде телескопической трубы, установленной параллельно одному силовому цилиндру и жестко смонтированной на нем, причем захват размещен радиально относительно колонны смещен относительно оси штока силового цилиндра при этом система управления снабжена дополнительным силовым цилиндром подпитки пневмогидравлического тормозного устройства, в поршне которого выполнена сквозная полость, сообщающаяся с атмосферой.
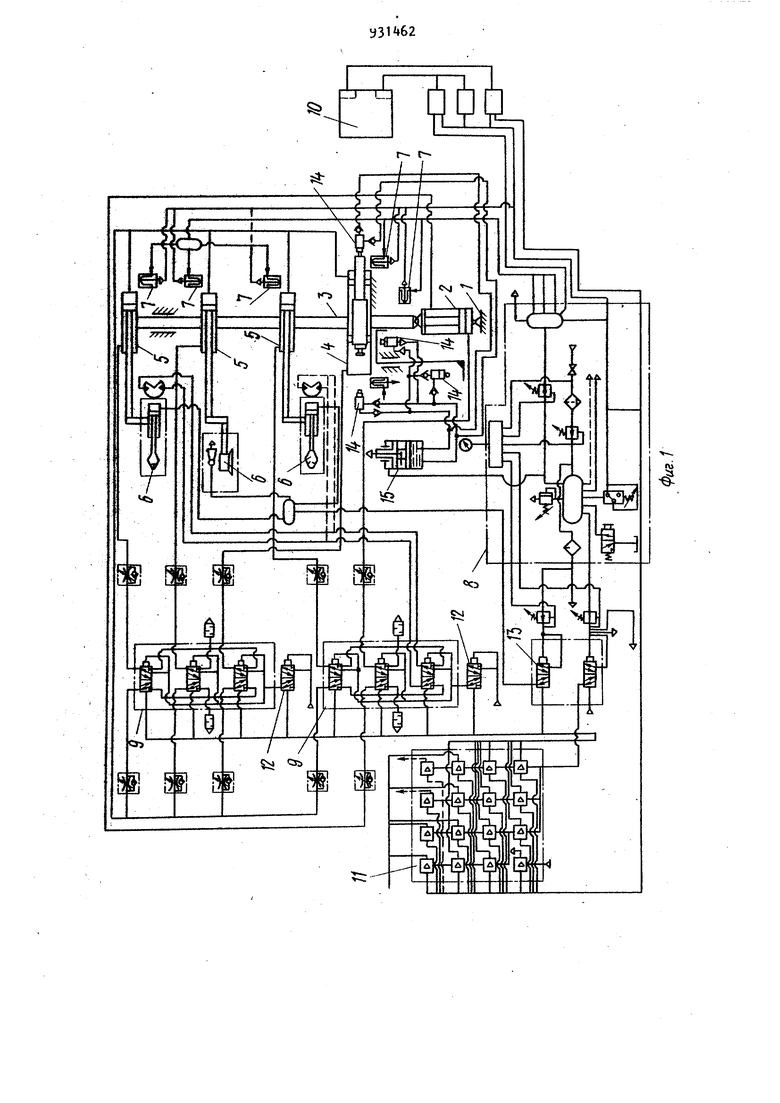
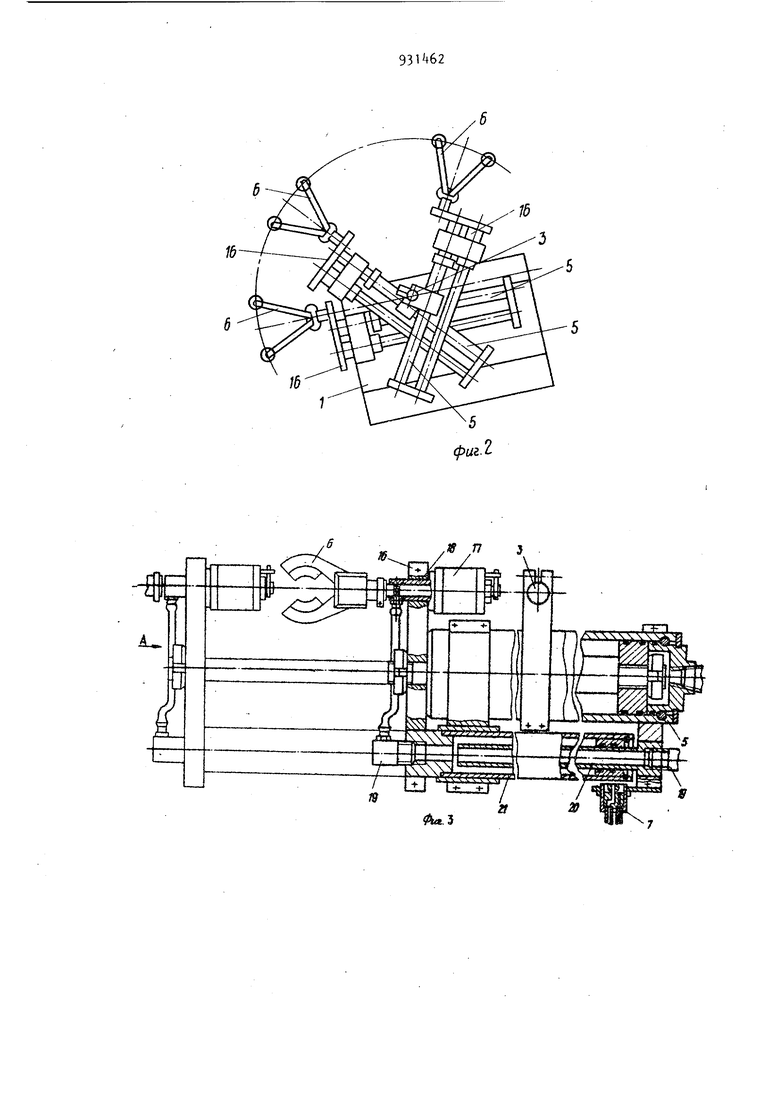
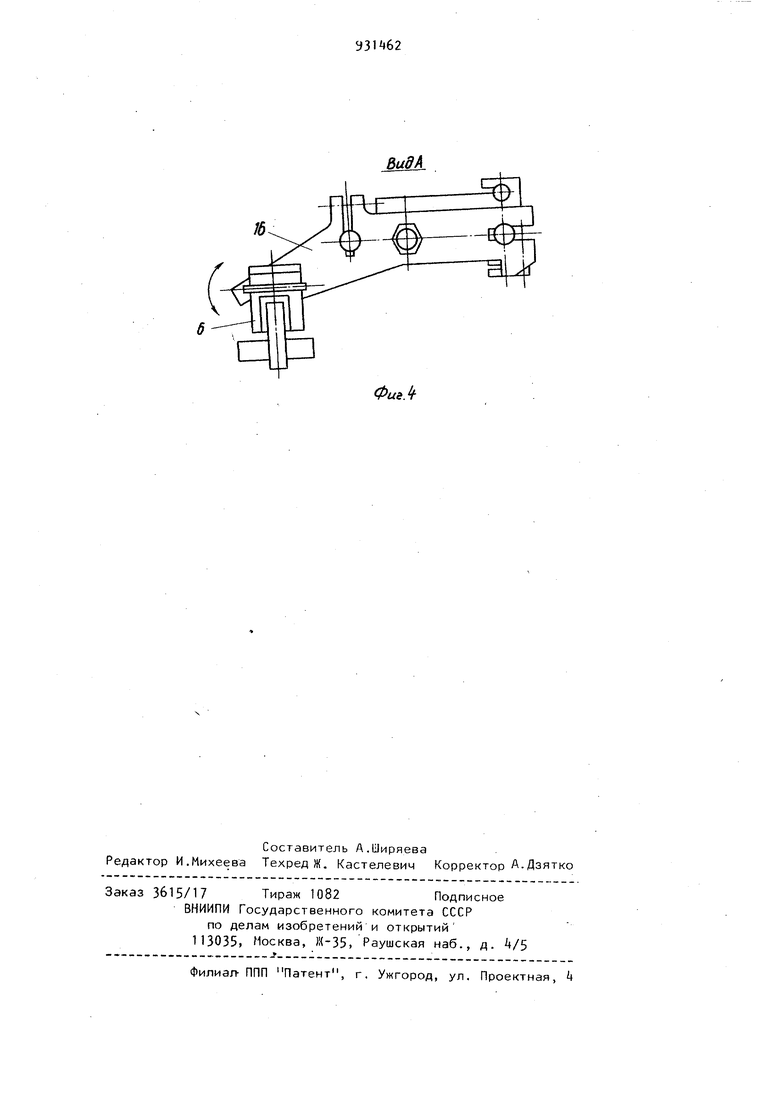
На фиг. 1 показана пневмокинематическая схема промышленного робота-, на фиг. 2 - промышленный робот, в плане , на фиг. 3 рука робота; на фиг. k - вид А на фиг.ЗПромышленный робот состоит из основания 1J шаонирно связанного меоез пневмопоивод 2 подъема с веотикальной колонной 3. которая связана также с пневмоприводом поворота через реечный механизм (не показан). На колонне 3 установлены руки, выполненные в виде пневмоцилиндров 5 и снабженные сменными захватами 6. Датчики 7 внешней информации закреплены на неподвижных звеньях робота и соединены параллельно с узлом 8 подготовки сжатого воздуха и с управляющими полостями пневмораспределителей 9 через цикловую систему 10 управления и блок 11 усилителей диск ретных сигналов, связанных с блоком 12 нулевой защиты пневмораспреде Iлиталей 9 и с блоком 13 защиты всей системы. Гидротормоза Н установлены на пу ти вертикального и вращательного перемещений колонны 3 и соединены чере запорный и сливной клапаны с цилиндром 15 подпитки, у которого запоршне вое пространство заполнено рабочей жидкостью, штоковая полость соединена с магистралью сжатого воздуха, а в штоке выполнена полость, соединяющая пространство между уплотнениями поршня с атмосферой. Захват 6 размещен радиально с колонной 3 и связан со штоком пневмоцилиндра 5 через промежуточный элемент в виде снабженной клеммными разъемами траверсы 16. В кЛеммном разъеме траверсы 16, смещенном относительно штока пневмоцилиндра 5, установлен пневмопривод 17 поворота захвата, закрепленный с помощью проставки 18. которая снабжена отверстиями для подвода энергоносителя через коммуникации 19 и телескопически соединенные трубы 20 и 21, закрепленные параллельно пневмоцилиндру 5Промышленный робот работает следующим образом. При включении уобога на заданный режим работы сжатый воздух поступает от цеховой сети в узел 8 подготовки сжатого воздуха. В узле 8 автоматически обеспечивается контроль давления воздуха в цеховой сети, в системе робота, в системе датчиков внешней и внутренней информации, очистка воздуха от частиц воды, компрессорного масла и твердых частиц, сброс из пневмосистемы избыточного давления, контроль минимального дав ления в пневмосистеме. питание через пневмораспределители блоков 12 и 13Нулевой и общей защиты, блока 11 усилителей дискретных сигналов, датчиков 7 внешней информации, цилиндра 15 подпитки, гидротормозов 1. От пневмораспределителей блока 12 нулевой защиты питание подается к пневмораспределителям 9. Пневмораспределители 9 управляют пневмоцилиндрами 2,А 5 и 17, обеспечивающими подъем (опускание), поворот и выдвижение (втягивание) руки, перемещение захватов б по заданным траекториям в зависимости от управляющих сигналов. Управляющие пневмосигналы от цикловой системы 10 управления поступают на блок 11 усилителей дискретных сигналов, где усиливаются до уровня, обеспечивающего переключение пневмораспределителей 9 и пневмораспределителей блока 12, а затем пневмосигналы поступают к управляющим полостям пневмораспределителей 9 и пневмораспределителей блоков 12 и 13. При выдвижении руки траверсы 16 перемещаются в горизонтальной плоскости перемещая захваты 6 радиально с колонной 3. Выдвижение рук может быть совмещено с поворотом захвата 6 вокруг оси пневмопривода 17. Руки с выдвинутыми захватами 6 опускаются с колонной 3 вниз. Раскрытие захвата 6 может быть совмещено с опусканием руки вниз. В таком положении захваты 6 находятся на исходных позициях, где осуществляется захват заготовки, контроль правильности их укладки, их фиксация в требуемом положении и другие операции. После захвата заготовки руки поднимаются колонной 3 в верхнее положение и втягиваются в исходное положение. Поворот захватов 6 с заготовками может быть совмещен с втягиванием рук. Поворот рук вправо вокруг колонны 3 может быть совмещен также с втягиванием рук. После поворота рук в крайнее правое положение обеспечивается выдвижение рук, затем их опускание и разжатие захватов, после чего цикл повторяется в описанной последовательности. Сигналы о крайних положениях рук, захватов, наличии заготовок на исходных позициях и другие поступают от датчиков 7 внешней информации. При этом пневмораспределители блока 12 нулевой защиты обеспечивают за5щиту пневмораспределителей 9,а пневмораспределители блока 13 защиту всей системы. Автоматическая управляемость торможения обеспечивается за счет того, что в момент торможения масло из гидротормозов 1 перетекает в цилиндр 15 подпитки, откуда возвращается в охлажденном состоянии. При этом утечки масла из системы предотвращаются воздушной завесой, образуемой в канавках между уплотнениями поршня, сообцающимися с атмосферой. Формула изобретения Промышленный робот, содержащий подъемно-поворотную колонну, установ ленную на основании и несущую связан ные междусобой механические руки, выполненные в виде силовых цилиндров на штоках которых через промежуточный элемент установлены захваты, а также систему управления, пневмогид2равлические тормозные устройства и коммуникации для подвода энергоносителя, отличающийся тем, что, с целью повышения производительности и расширения, технологических возможностей, каждый промежуточный элемент выполнен в виде траверсы, конец которой связан с коммуникацией, выполненной в виде телескопической трубы, установленной параллельно одному силовому цилиндру и жестко смонтированной на нем, а захват размещен радиально относительно колонны и смещен относительно оси штока силового цилиндра, при этом система управления снабжена дополнительным силовым цилиндром подпитки пневмогидравлического тормозного устройства, в поршне которого выполнена сквозная полость, сообщающаяся с атмосферой. Источники информации, принятые во внимание при экспертизе 1. Авторское свидетельство СССР № 503712, кл. В 25 3 9/00, 1976.
ь
| название | год | авторы | номер документа |
|---|---|---|---|
| Промышленный робот | 1984 |
|
SU1684019A1 |
| Устройство управления промышленным роботом | 1981 |
|
SU970323A1 |
| УСТРОЙСТВО ОТВОДА КОММУНИКАЦИЙ С РАЗЪЕМНЫМИ СОЕДИНЕНИЯМИ | 2011 |
|
RU2479471C1 |
| ПНЕВМАТИЧЕСКИЙ ПОЗИЦИОННЫЙ ПРИВОД | 2009 |
|
RU2450174C2 |
| Рука промышленного робота | 1987 |
|
SU1542794A1 |
| Автоматизированный комплекс для листовой штамповки | 1979 |
|
SU774722A1 |
| Промышленный робот | 1974 |
|
SU503712A1 |
| Схват промышленного робота | 1984 |
|
SU1250452A1 |
| Устройство для отделения листа от стопы и подачи его в зону обработки | 1985 |
|
SU1338940A1 |
| Пневмогидравлический робот | 1974 |
|
SU574292A1 |
Т} 3
Id
вм.
Фиг.
