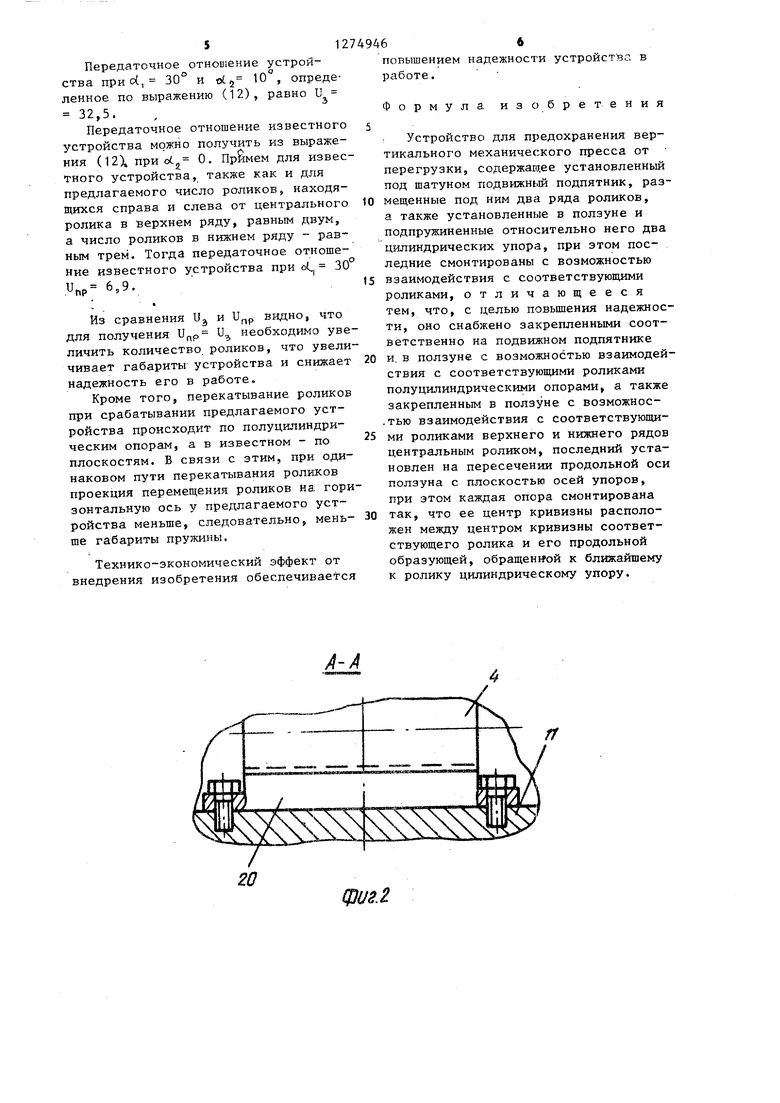
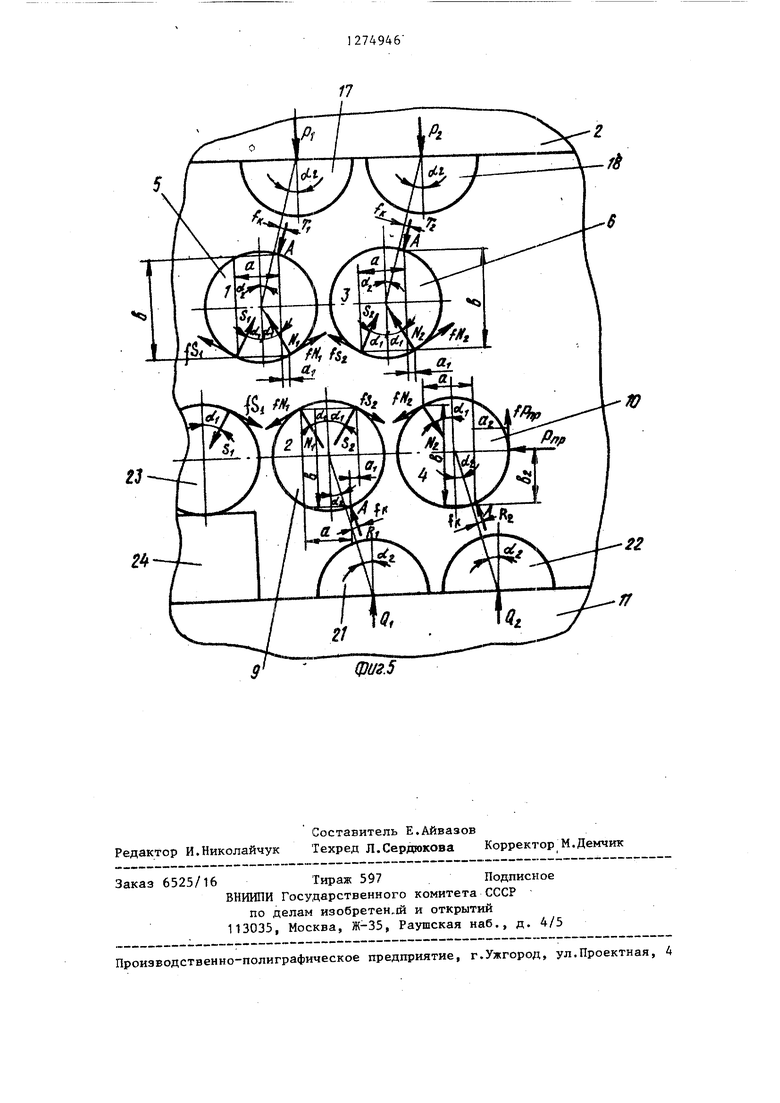
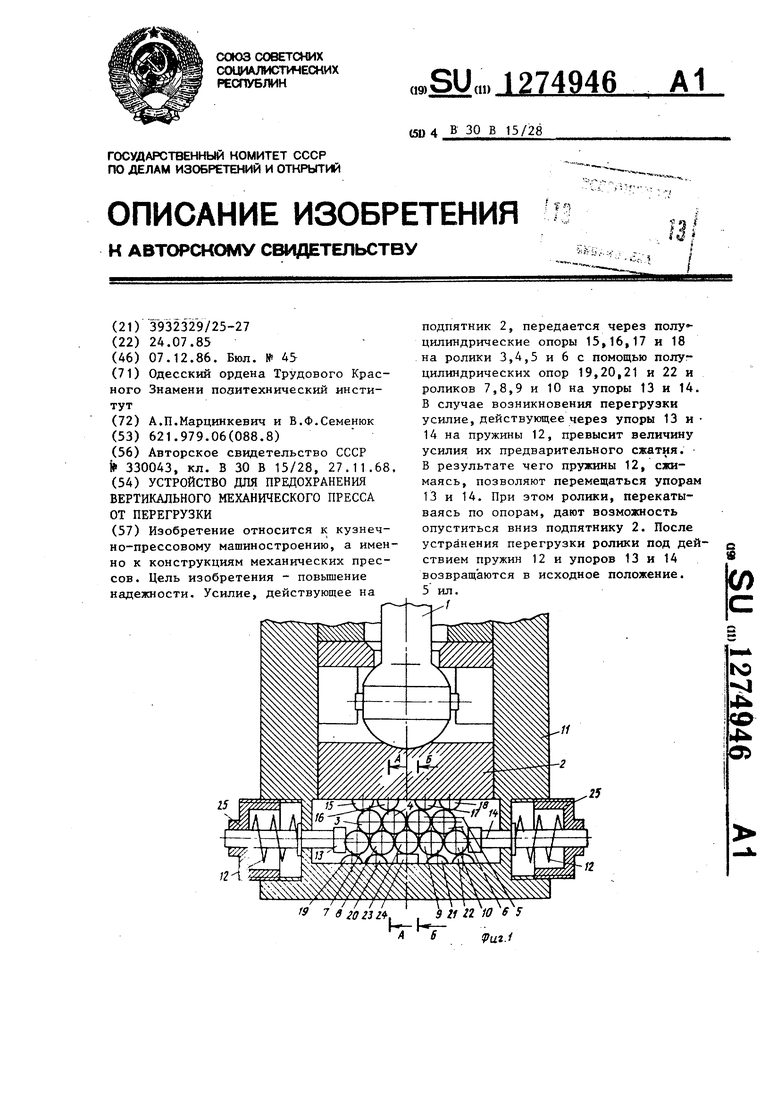
Изобререние относится к кузнечно прессовому машиностроению, а именно к конструкции устройства для предохранения вертикальных механических прессов от перегрузки. Цель изобретения - повышение надежностиНа фиг.1 показано предлагаемое устройство, общий вид; на фиг. 2 разрез А-А на фиг.1; на фиг.З - разрез Б-Б на фиг.1; на фиг.4 - вид В на на фиг.5 - схема передачи усилий в устройстве. Устройство содержит установленный под шатуном 1 подвижный подпятник 2, размещенные под ним два ряда роликов 3-6 и 7-10, установленные в ползуне 11 и подпружиненные посредством пружин 12 относительно него два цилиндрических упора 13 и 14, закрепленные соответственно на подвижном подпятнике 2 и в ползуне 1 1 полуци-пиндрические опоры 15-18 и 19-22, а также центральный ролик 23, который установлен на пересечении продольной оси ползуна 11 с плоскостью осей упо ров 13 и 14. Каждая полуцилиндрическая опора смонтирована так, что в ис ходном положении ее центр кривизны расположен между центром кривизны соответствующего ролика и его продольной образующей, обращенной к бли жайшему к ролику цилиндрическому упору 13 или 14. Центральный ролик 23 смонтирован на площадке 24, прикрепленной к ползуну 11. Для регулиро вания величины усилия поджатия пружин 12 в ползуне смонтированы резь.бовые втулки 25 „ Параллельная установка двух групп опор, а также роликов между собой позволяет получить линейный контакт между роликами и опорами и тем самым повысить нагрузочную способность уст ройства. Расположение в исходном сос тоянии центра кривизны каждой опоры между центром кривизны контактирующе го с ней ролика и образующей последнего, находящихся со стороны поджима ющей ролики пружины, дает возможность увеличить передаточное отношение устройства и с помощью меньшего числа роликов снизить усилие, действующее на пружины, и, следовательно, уменьшить их габаритные размеры, а также повысить надежность устройства в работе. При указанном расположении роли.ков и опоры возникают дополнительные горизонтальные усилия, направленные в сторону центрального ролика. Для . восприятия этих горизонтальных усилий опоры жестко закреплены на подпятнике и в ползуне. Симметричное расположение роликов и опор относительно центрального ролика позволяет уравновесить горизонтальные силы и тем самым устранить их воздействие на пару трения подпятник - корпус. Жесткое закрепление центрального ролика устраняет лишнюю степень подвижности и позволяет получить кинематическую схему устройства с нулевой подвижностью. Установка центрального ролика на опорной площадке на одной высоте с роликами 7-10 дает возможность обеспечить одинаковую нагрузку на все верхние 3-6 и нижние 7-10 тролики в исходном состоянии. Устройство работает следующим образ ом. Усилие, действующее на подпятник 2, передается через опоры 15-18 и с помощью опор 19-22 роликов 7-10 на упоры 13 и 14. В случае возникновения перегрузки усилие, действующее через упоры 13 и 14 на пружины 12, превьш1ает величину усилия предварительного их сжатия, в результате чего пружины 12, сжимаясь, позволяют перемещаться упорам 13 и 14. При этом ролики, перекатываясь по опорам, дают возможность опуститься вниз подпятнику 2. После устранения перегрузки ролики под действием пружин 12 и упоров 13 и 14 возвращаются в исходное положение , Приняв радиус ролика равным радиусу кривизны опоры, получаем (фиг.З): b r(cosct,+ созЫ )- f sinci а r(sinol,+ siiiot,) + f cosoC a, r(sino(.,-sincit) - f coscL ; cosctj- . j, - sinctp - f cosci. а„ r(1 радиус ролика; коэс1)фициент трения качения; угол между вертикалью и нормалью, проведенной к линии контакта роликов; угол между вертикалью и нормалью, проведенной к линии ролика и опоры. 3127(9 Рассмотрим равновесие ролика 5. IM 0; fS, bcosd,- fS, asind,-S, асо5Ы,+ S,bsinof,+ fN, bcosot,+ + fN asinoi.+ N acosot,- N bsino(.,0, где f - коэффициент трения скольжения. Учитывая, что Т P/cosoi,, IY 0; -Р + fS, sino,+ S, coso(,+ + (.+ N coso-, 0, (2) обозначим bCsinot,- fcosoi,) -.aCcosoi/,,, + fsino) B;T5 bCsind,- fcosoL,) - a,(cosol+ + fsinot А. Используя выражение (1) с учетом 20 вьфажения (3), получаем St N,A/B. (4) Подставляя уравнение (4) в формулу (2), находим25 м р I г..-- (1 + -t-)(fsiiioL+ cosoij В11 ., 30 Из рассмотрения.равновесия ролика 6 аналогично получаем В S N -f- , откуда с учетом выражения (5) и раgВ венства --- г- --1В . (1 + ) (f;i:;r;io;7: Рассмотрим равновесие ролика 6. Из равенства нулю момента всех сил, действующих на ролик относительно точки А, аналогично получаем (1 + -ё)50 N, Р, АТ--: 7) . + ) (fsinot + cosct ; Г s;n(ol +OL,.) f г S 1+ I S.hCd,-d) J L S - «........I., -. - , S.n(c.L, V-:r I 3.h(cC -t-cf. (1) (5) (6) 464 G учетом того, что Т Р /cosoL, lY 0; -P + fS-sincA,+ S,coso(,+ + fN.sino(,-f N cosot 0. -. Откуда ,, ---) р - р f ° Р, (/А) . (8) Рассмотрим равновесие ролика 10. Мд 0; fN bcosoL,+ fN,asinoC,+ ЬР °П N bsinot,- а,Р„, + + ьР„р- U, откуда усилие, действующее на пружину, g (1 А (н|)) . /gj 1 р + р ;. р 2 в 11 2 вв ( А где Р.,- вертикальное усилие, дей ствующее на подпятник. С учетом выражения (10) выражение ) имеет вид „ (,.11з Р.А fi4)(bino.,.cosc.,){v«j)(i4.). удобства анализа примем f, О Л и г - и, тогда д j- sin(ot +о4,Л В г sin( Ь,+ г cosd.,. Передаточное отношение устройства in(oL -oL«) 1 , . coso.,coSCt. in5(oL,+oL,j) J ,, . ..-. ,., .,.„.- :-- - - - -- - ..) )1 / 5 (, ) J 1 4 Передаточное отношение устройства присз(, 30 н tjtj определенное по выражению (12), 32,5. Передаточное отношение известного устройства можно получить из выражения (1 2Х при ot j О . Примем для извес тного устройства, также как и для предлагаемого число роликов, находящихся справа и слева от центрального ролика в верхнем ряду, равным двум, а число роликов в нижнем ряду - равным трем. Тогда передаточное отношение известного устройства при оЦ 30 UnP 6„9. Из сравнения U и видно, что для получения Uf,p U,, необходимо уве личить количество роликов, что увели чивает габариты устройства и снижает надежность его в работе. Кроме того, перекатывание роликов при срабатывании предлагаемого устройства происходит по полуцилиндрическим опорам, а в известном - по плоскостям. Б связи с этим, при одинаковом пути перекатывания роликов проекция перемещения роликов на. гори зонтальную ось у предлагаемого устройства меньше, следовательно, меньше габариты пружины. Технико-экономический эффект от внедрения изобретения обеспечивается повышением надежности устройства в работе. Формула изобретения Устройство для предохранения вертикального механического пресса от перегрузки, содержащее установленный под шатуном подвижный подпятник, размещенные под ним два ряда роликов, а также установленные в ползуне и подпружиненные относительно него два цилиндрических упора, при этом последние смонтированы с возможностью взаимодействия с соответствующими роликами, отличающееся тем, что, с целью повышения надежности, оно снабжено закрепленными соответственно на подвижном подпятнике и. в ползуне с возможностью взаимодействия с соответствующими роликами полуцилиндрическими опорами, а также закрепленным в ползуне с возможностью взаимодействия с соответствующими роликами верхнего и нижнего рядов центральным роликом, последний установлен на пересечении продольной оси ползуна с плоскостью осей упоров, при этом каждая опора смонтирована так, что ее центр кривизны располо ен между центром кривизны соответствующего ролика и его продольной образующей, обращенной к ближайшему к ролику цилиндрическому упору.

| название | год | авторы | номер документа |
|---|---|---|---|
| Устройство для предохранения вертикального механического пресса от перегрузки | 1986 |
|
SU1366423A1 |
| Устройство для предохранения вертикального механического пресса от перегрузки | 1988 |
|
SU1532304A1 |
| Ортогональная зубчатая перегородка | 1984 |
|
SU1237816A1 |
| Зубчатая передача | 1983 |
|
SU1359522A1 |
| Винтовой пресс | 1990 |
|
SU1750955A1 |
| Способ обработки резанием трохоидальных поверхностей и устройство для его осуществления | 1980 |
|
SU897405A1 |
| Устройство для управления манипулятором | 1984 |
|
SU1226406A1 |
| ШАРНИР ШПИНДЕЛЯ ПРОКАТНОГО СТАНА | 1994 |
|
RU2089308C1 |
| Упругая регулируемая система | 1989 |
|
SU1740819A1 |
| Предохранитель пресса | 1977 |
|
SU619364A1 |
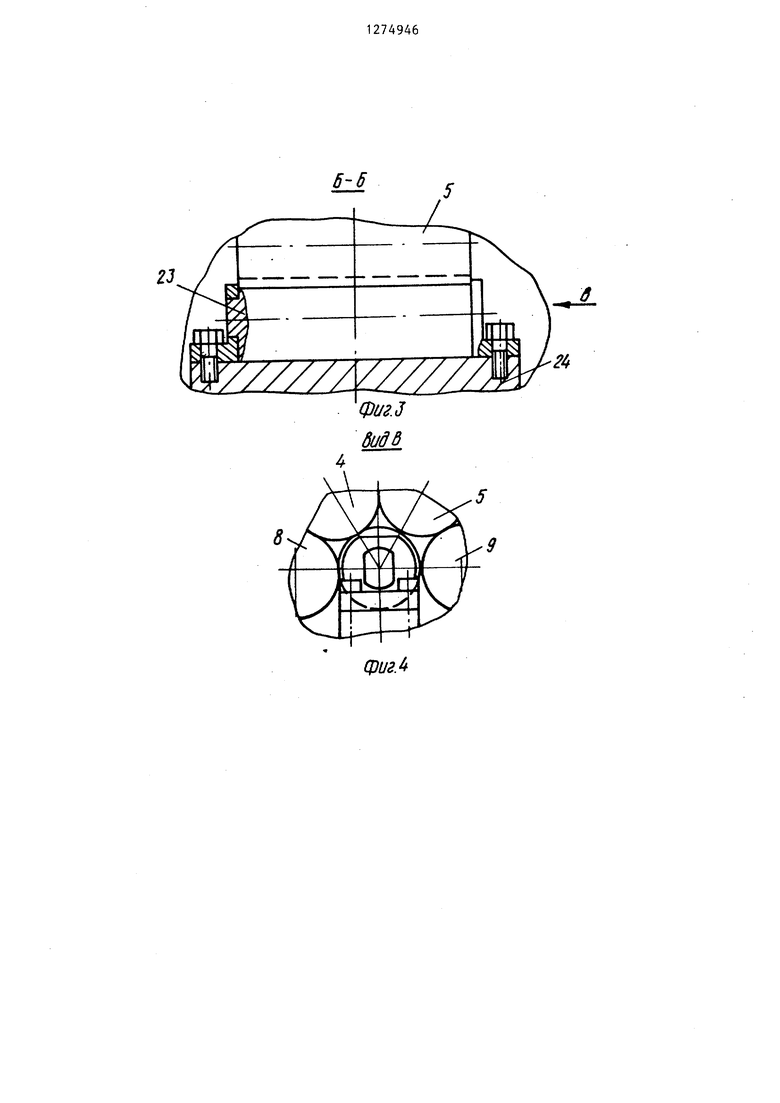
6-6
24
Фиг.З дидВ
фиг А
| УСТРОЙСТВО для ПРЕДОХРАНЕНИЯ МЕХАНИЧЕСКИХ ПРЕССОВ ОТ ПЕРЕГРУЗКИ | 0 |
|
SU330043A1 |
| Способ обработки медных солей нафтеновых кислот | 1923 |
|
SU30A1 |
| Цель изобретения - повышение надежности | |||
| Усилие, действующее на 7 в 20 2324подпятник 2, передается через полу цилиндрические опоры 15,16,17 и 18 на ролики 3,4,5 и 6 с помощью полуцилиндрических опор 19,20,21 и 22 и роликов 7,8,9 и 10 на упоры 13 и 14 | |||
| В случае возникновения перегрузки усилие, деиствукяцее через упоры 13 и 14 на пружины 12, превысит величину усилия их предварительного сжатия | |||
| Способ гальванического снятия позолоты с серебряных изделий без заметного изменения их формы | 1923 |
|
SU12A1 |
| При этом ролики, перекатываясь по опорам, дают возможность опуститься вниз подпятнику 2 | |||
| Способ гальванического снятия позолоты с серебряных изделий без заметного изменения их формы | 1923 |
|
SU12A1 |
| Кипятильник для воды | 1921 |
|
SU5A1 |
| f | |||
