Изобретение относится к электротехнике, а именно к автоматическому управлению электроприводами, и может использоваться при создании электроприводов в металлургии, химической промышленности, машиностроении. Цель изобретения - повышение быстродействия и точности электропривода. На чертеже изображена функциональ ная схема электропривода. Электропривод содержит последовательно соединенные первый 1 и второй 2 блоки сравнения, регулятор 3, усилитель 4 мощности и электродвигатель 5, а также датчик 6 скорости, выход которого подключен к вычитающему вхо ду блока 1 сравнения, модель 7 электродвигателя и датчика скорости, под ключенную своим входом к выходу усилителя 4 мощности, третий блок 8 сравнения, суммирующий вход которого соединен с выходом модели 7, а вычитающий - с выходом датчика 6 скорости. Электропривод содержит также пос .ледовательно соединенные усилитель 9 выпрямитель 10, пороговый элемент 11 и блок 12 перемножения, при этом вхо усилителя 9 подключен к выходу блока 1 сравнения, второй вход блока 12 перемножения соединен с выходом блока 8 сравнения а выход блока 12 перемножения подключен к вычитающему входу блока 2 сравнения. Электропривод работает следующим образом. Задающий сигнал Uj поступает на суммирующий вход первого блока 1 сравнения, а на его вьгаитающий вход поступает сигнал с выхода датчика 6 скорости. На выходе блока 1 сравнения появляется сигнал ошибки , который поступает на суммирующий вход второго блока сравнения, где происходит сравнение ошибки с сигналом коррек ции , поступающим с выхода блока 12 перемножения. Одновременно сигнал ошибки поступает на вход усилителя 9. Усиленный сигнал ошибки выпрямляют выпрямителем 10 и подают на пороговый элемент 11. Пороговый элемент 11 настроен сле дующим образом: при ошибке - доп сигнал на выходе порогового элемента равен нулю, а при доп сигнал с выхода порогового элемента 11 принимает постоянное значение, например, равное единице. Сигнал с выхода поро222гового элемента 11 подают на блок 12 перемножения, где его перемножают с сигналом, поступающим с выхода блока 8 сравнения. Формирование этого сигнала осуществляют путем сравнения сигнала с выхода модели 7 электродвигателя и датчика скорости и сигнала с выхода датчика 6 скорости. Еслиб Едоп, то электропривод работает без коррекции, так как сигнал с блока 12 перемножения, поступающий на вход блока 2 сравнения, равен нулю. Система электропривода обрабатывает задающее воздействие с быстродействием, определяемым собственной частотой системы. Как только доп, то сигнал с порогового элемента 11 становится равным единица, а следовательно, с блока 12 перемножения на вход блока 2 сравнения поступает сигнал коррекции и, . Электропривод корректирующим сигналом, стабилизируется. Таким образом, отработка сигнала осуществляется с быстродействием, определяемым собственными параметрасистемы (без параметров корректимирующего устройства). При отработке возмущающего воздействия М,, электропривод работает следующим образом. Возмущающее воздействие Mf, действующее на электродвигатель, первоначально увеличивает .ошибку системы. При 5Едо„ на выходе порогового элемента 11 сигнал равен нулю. Это приводит к отключению корректирующего устройства, т.е. на выходе блока 12 перемножения сигнал, поступающий на блок 2 сравнения, равен нулю. Система электрпривода начинает отработку возмущения с быстродействием, определяемым параметрами исходной системы (регулятора 3, уси лителя 4 мощности, электродвигателя 5). Как только при отработке возмущающего воздействия ошибка до„ , сигнал коррекции с выхода блока 12 перемножения поступает на вход блока 2 сравнения. Система стабилизируется, и ошибка вновь начинает увеличиваться . Это приводит к отключению коррекции. Все процессы в дальнейш.ем повторяются. Следовательно, при отработке возмущающего воздействия имеет место колебание ошибки системы около доп с высокой частотой (определяемой параметрами исходной системы).
Таким образом, данная система управления электроприводом позволяет существенно увеличить быстродействие и повысить точность управления.
Формула изобретения
Электропривод, содержащий электродвигатель постоянного тока, последовательно соединенные первый и второй блоки сравнения, регулятор, усилитель мощности, подключенный к электродвигателю, а также датчик скорости выход которого подключен к вычитающему входу первого блока сравнения, модель электродвигателя к датчика скорости, подключенную входом к выходу
усилителя мощности, третий блок сравнения, суммирующий вход которого соединен с выходом модели, а вычитающий - с выходом датчика скорости, отличающийся тем, что, с целью повьшения быстродействия и точности электропривода, в него введены последовательно соединенные усили . тель, выпрямитель, пороговый элемент и блок перемножения, при этом вход усилителя подключен к выходу блока сравнения, второй вход блока перемножения соединен с выходом третьего блока сравнения, а выход блока перемножения подключен к вычитающему входу второго блока сравнения.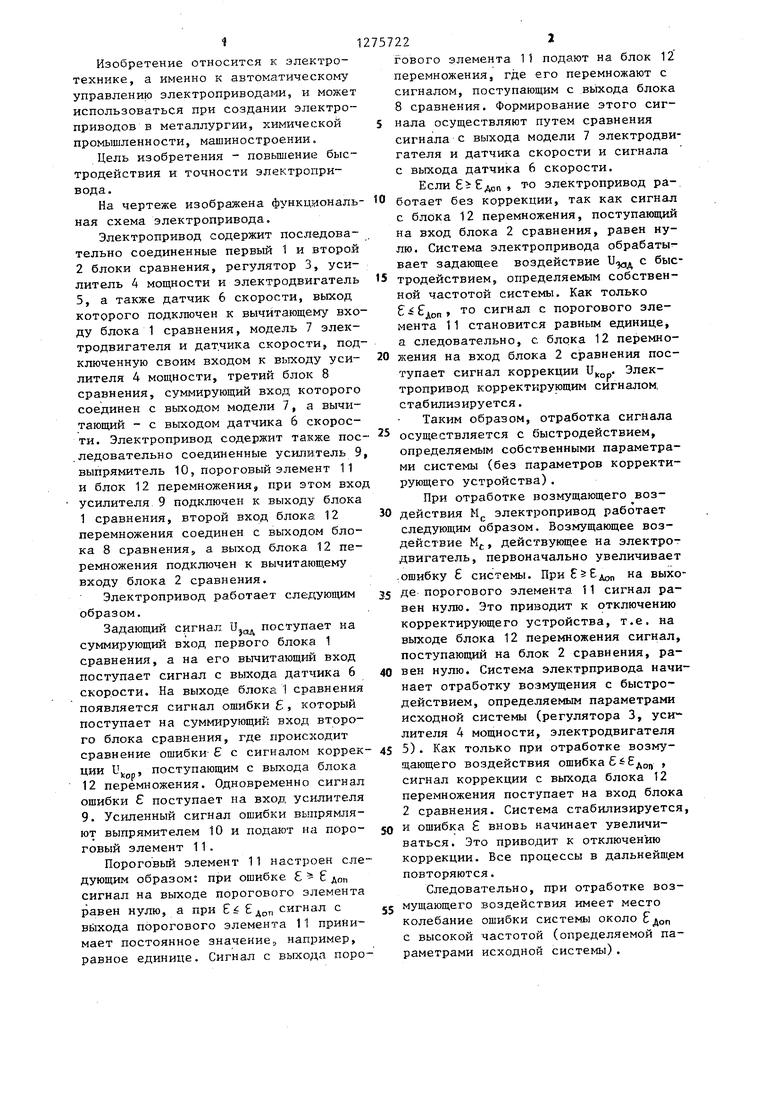

| название | год | авторы | номер документа |
|---|---|---|---|
| СИСТЕМА ЭЛЕКТРОПРИВОДА | 1993 |
|
RU2068614C1 |
| Система автоматического регулирования | 1982 |
|
SU1084735A1 |
| ЭЛЕКТРОПРИВОД ПОСТОЯННОГО ТОКА С УПРУГИМИ СВЯЗЯМИ | 2012 |
|
RU2513871C1 |
| УСТРОЙСТВО ДЛЯ УПРАВЛЕНИЯ ЭЛЕКТРОПРИВОДОМ С ФРИКЦИОННОЙ НАГРУЗКОЙ | 1992 |
|
RU2079961C1 |
| Электропривод постоянного тока | 1985 |
|
SU1339853A1 |
| Электропривод постоянного тока | 1983 |
|
SU1145438A1 |
| ЭКСКАВАТОРНЫЙ ЭЛЕКТРОПРИВОД | 1994 |
|
RU2068615C1 |
| Электропривод постоянного тока | 1983 |
|
SU1169124A1 |
| ЭЛЕКТРИЧЕСКИЙ ПРИВОД | 2012 |
|
RU2491705C1 |
| ЛИНЕЙНЫЙ СЛЕДЯЩИЙ ЭЛЕКТРОПРИВОД | 1989 |
|
RU1774821C |
Изобретение.относится к электротехнике и может быть использовано в Udc jaff создании электроприйодов, например, в металлургии, химической промышленности. Повьшение быстродействия и точности регулирования .обеспечивает- ся за счет того, что система снабжена последовательно соединенными усилителем 9, вьйтрямителем 10, пороговым элементом 11 и блоком 12 перемножения. При этом вход усилителя 9 п одключен к выходу блока 1 (сравнения, ;второй вход блока 12 перемножения соединен с выходом блока 8 сравнения, а выход блока 12 перемножения подключен к вычитающему входу блока 2 сравнения. При отработке возмущающего воздействия имеет место колебание ошибки системы около с высо(Л кой частотой, определяемой параметрами исходной системьи 1 ил. Me L S3 СЛ Ч 0 NO 8
| Гарнов В.К., Рабинович В.Б., Вишневецкий Л.М | |||
| Унифицированные системы автоуправления электроприводом в металлургии | |||
| - М.: Металлургия, ,1971, с | |||
| Разборный с внутренней печью кипятильник | 1922 |
|
SU9A1 |
| Боровиков М.А | |||
| Расчет быстродействующих систем автоматизированного электропривода и автоматики | |||
| - Изд-во Саратовского ун-та, 1980, с | |||
| Приспособление для автоматической односторонней разгрузки железнодорожных платформ | 1921 |
|
SU48A1 |
