Изобретение относится к система автоматического регулирования и мо жет быть применено для регулирования объектов с переменными парамет рами и запаздьгаанием. Известна система автоматическог регулирования, содержащая последовательно Соединенные первый и второй блоки рассогласования, регулятор, объект регулирования, состоящий из соединенных последовательно компенсируемой и некомпенсируемой частей объекта, моделей компенсируемой и некомпенсируемой частей объекта l . Недостатком известной системы .является необходимость точного моделирования компенсируемой части объекта, а также низкая точность, так как возмущающие воздействия,, действующие на компенсируемую част объекта, нарзппают условия компенсации. Наиболее близкой по технической сущности к предлагаемой является система автоматического регулирования, содержащая последовательно соединенные первый и второй блоки, рассогласования, регулятор, объект регулирования,- состоящий из последовательно соединенных компенсируе мой я некомпенсируемой частей, выход которого соединен с одним из входов первого блока рассогласования, корректирующее устройство, вы полненное из статической модели компенсируемой части, модели неком пенсируемой части объекта и элемен та сравнения 2 . Однако известная система характеризуется низким быстродействием вследствие уменьшения собственной частоты системы и низкой статической и динамической точностью, так как возмущающее воздействие, прило женное к компенсируемому звену, не отрабатывается системой. Цель изобретения - повышение быстродействия и точности системы. Поставленная цель достигается те что в систему автоматического регулирования, содержащую модель некомпенсируемой части объекта регулирования, элемент сравнения, последова тельно соединенные первый и второй блоки рассогласования, регулятор и статическую модель компенсируемой части объекта регулирования, вход и 35, 2 выход объекта регулирования, состоящего -из последовательно соединенных компенсируемой и некомпенсируемой частей, подключены соответственно к выходу регулятора и первому входу первого блока рассогласования, введены сумматор, последовательно соединенные модель компенсируемой части с удвоенным статическим коэффициентом и первый блок перемножения, последовательно соединенные усилитель и первый пороговый элем1ент, последовательно соединенные выпрямитель, второй пороговый элемент и второй блок перемножения, последовательно соединенные третий пороговый элемент и третий блок перемножения, подключенный вторым входом к выходу некомпенсируемой части объекта регулирования, а выходом к суммирующему входу элемента сравнения, вычитаюпщй вход и выход которого подключены соответственно к выходу первого блока перемножения и к первому входу сумматора, соединенного вторым входом с выходом статической модели некомпенсируемо|й части объекта регулирования, вход усилителя соединен с выходом первого блока сравнения, а выход - с входом выпрямителя ; и третьего порогового элемента, вход модели компенсируемой части объекта регулирования с удвоенным статическим коэффициентом подключен к выходу ре1 уЛятора, а выход первого порогового элемента - к второму входу первого блоки перемножения, второй вход и выход второго блока перемножения подключены соответственно к выходу модели некомпенсируемой час- . ти объекта регулирования, соединенной входом с выходом сумматора, и к второму входу второго блока сравнения. На чертеже, представлена блок-схема системы. На схеме приведены блоки 1 и 2 рассогласования, регулятор 3, (WpCply объект регулирования, состоящий из соединенных последовательно компенсируемой 4 (W(j(p)) и некомпенсируемой 5 (WQ(P)) частей, статическая модель 6 компенсируемой части объек га (Кох), элемент 7 сравнения, модель 8 некомпенсируемой части объекта ()) модель 9 компенсируемой части с удвоенным статическим коэффициентом ((р)),блоки 10-12-переножения, сумматор 13, пороговые элементы 14-16, выпрямитель 17, усилйтель 18.
Система работает следующим образом.
Входной сигнал Xgj поступает на первь1й вход блока 1 рассогласования, а на второй вход подается выходной сигнал системы Хщ,„. На выходе блока
Iрассогласования появляется сигнал ошибки , который подают на вход блока 2 рассогласования, где происходит сравнение ошибки с сигналом коррекции Хц, поступающим с выхода блока 12 перемножения. Одновременно сигнал ошибки поступает на вход усилителя 18. Усиленный сигнал ошибки через пороговые элементы 14 и. 16 поступает на первые входы блоков 10
и 11 перемножения соответственно, а через выпрямитель 17 и пороговый элемент 15 - на первый вход блока 12 перемножения. На второй вход блока перемножения подается сигнал с выхода регулятора 3 предварительно пропущенный через модель компенсируемой части с удвоенным статическим коэффициентом 9. На второй вход блока
I1перемножения поступает сигнал с выхрда компенсируемой части 4 объект Сигналы с выходов блоков 10 и 11 сравниваются в элементе 7 сравнения
и результат сравнения подается на первый вход сумматора 13, на второй вход которого поступает сигнал через статическую модель 6 с выхода компенсируемой части объекта регулятора 3. Вьрсодной сигнал сумматора 13 через модель 8 некомпенсируемой части подается на второй вход блока 12 перемножения. Пороговый элемент 14 выдает, сигнал равный единице, если , и равный нулю, если 0. Пороговый элемент 15 реагирует на абсолютную величину ошибкиi, т.е. при выходе элемента 15 сигнал равен единице, а в других случаях - нулю.
Пороговый элемент 16 вьщает сигнал равный единице, если С О, а при
F с О - сигнал равный - 1. - ,
Если , то система автоматического регулирования работает без коррекции, так сигнал с блока 12, поступающий на вход блока 2 pacedгласования, будет равен нулю. Система автоматического регулирования будет отрабатьшать управляющее воздействие XQ с быстродействием, определярмым собственной частотой системы.
Как только 0 |Eft(,n сигнал с порогового элемента 15 станет равным единице, а следовательно, с блока 12 перемножения на вход блока 2 рассогласования поступает сигнал коррекции с выхода модели .8. При этом в зависимости от знака ошибки Е сигнал коррекции формируется по-разному. Если 7 О, то Х () X а если е О, то Хц NS (Кр - WoJXp. При выполнении условия W, Woj корректирующий сигнал Xjj не зависит от знака ошибки. Это обстоятельство 1обеспечивает отработку управляющего воздействия X независимо от способа формирования корректирующего сигнала Х|, т.е. выходная координата системы X j(j, при действии коррекции определяется как
/P(,((P)
бых()
)
Таким образом, отработка управляющего воздействия осуществляется с быстродействием, определяемым собственными параметрами системы (без параметров корректирующего устройства) . При достижении ошибкой величины О 1 |Ч€доо включается корректирующее устройство и система стабилизируется, так как параметры компеирируемой части 4 объекта не влияют на устойчивость системы (что видно из выражения характеристического уравнения).
При отработке возмущающего воз-: действия , прикладываемого к компеисируемой части 4 объекта, способ формирования корректирунщего сигнала сказьшается на поведении системы.
Предположим, что в результате приложения возмущения i сигнал ощибки системы Е О, тогда формирование корректирующего сигнала осуществляется таким образом, что ошибка при этом определяется
.Wp(p)WoK(j)ot(
eiP)f(p)) UWp(0Ko,(p,)
Согласно этого вьфажения ошибка стремится изменить знак, т.е. 0. Это приводит к тому, что изменяется способ формирования корректирующего
сигнала и выражение ошибки системы будет иметэ вид
)l(P)W
т.е. ошибка € стремится вновь изменить знак (). Это обстоятельство приводит вновь к изменению способа формирования корректирующего сигнала. Все Процессы в дальнейшем будут повторяться. Следовательно,
при обработке возмущакнцего воздействия имеет место колебание опшбки системы около нулевого положения, ричем частота колебаний в идеале стремится к бесконечности.
Таким образом, предлагаемая система автоматического регулирования позволяет существенно увеличить быстродействие и точность регулирования .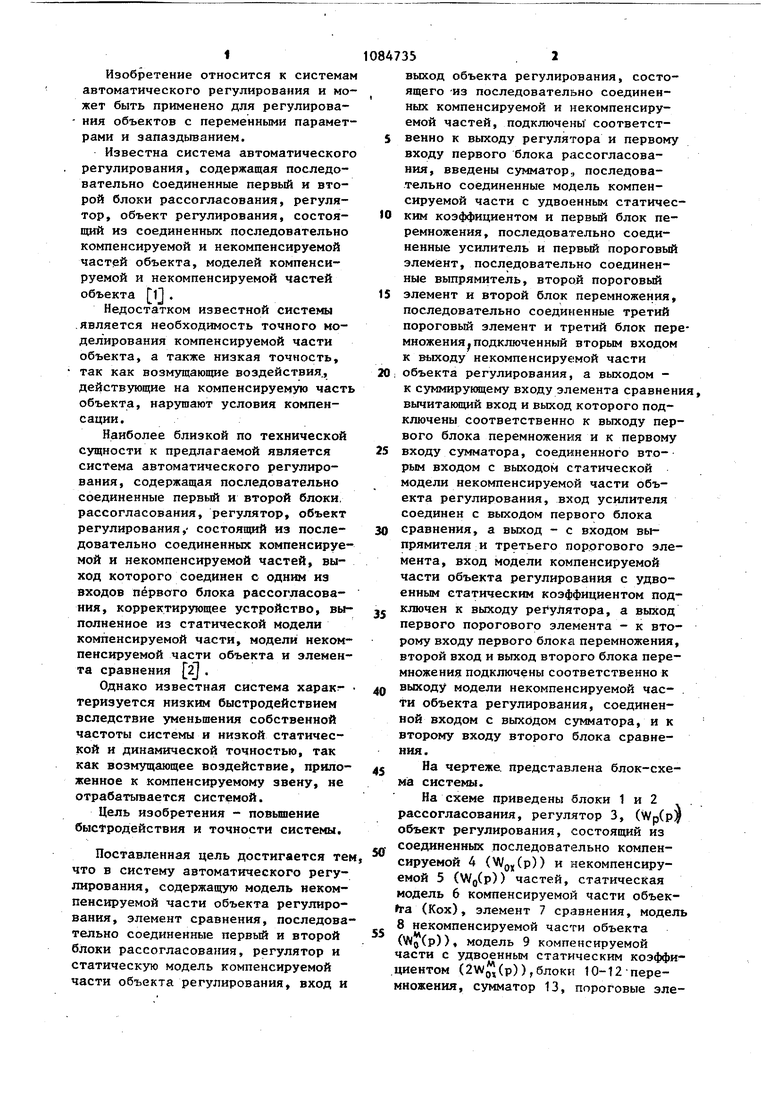
| название | год | авторы | номер документа |
|---|---|---|---|
| Самонастраивающаяся система управления | 1980 |
|
SU924670A1 |
| Следящая система | 1990 |
|
SU1829024A1 |
| СПОСОБ РАБОТЫ ПРОПОРЦИОНАЛЬНО-ИНТЕГРАЛЬНОГО РЕГУЛЯТОРА | 2014 |
|
RU2573731C2 |
| Частотно-импульсный регулятор | 1985 |
|
SU1287100A1 |
| Следящая система | 1990 |
|
SU1833831A1 |
| РЕГУЛЯТОР ПОЛОЖЕНИЯ ЭЛЕКТРОДА ДУГОВОЙ СТАЛЕПЛАВИЛЬНОЙ ЭЛЕКТРОПЕЧИ | 2006 |
|
RU2334926C2 |
| Электропривод | 1984 |
|
SU1275722A1 |
| Адаптивная система управления | 1985 |
|
SU1361502A1 |
| Система автоматического регулирования скорости электропривода | 1984 |
|
SU1277331A1 |
| Адаптивная система управления | 1984 |
|
SU1257607A1 |
СИСТЕМА АВТОМАТИЧЕСКОГО РЕГУЛИРОВАНИЯ, содержащая модель некомпенсируемой части объекта регулирования, элемент сравнения, последовательно соединенные первый и втогрой блоки рассогласования, регулятор и статическую модель компенсируемой части объекта регулирования, вход и выход объекта регулирования, состоящего из последовательно соединенных компенсируемой и некомпен- сируемой частей, подключены соответственно к выходу регулятора и к первому входу первого блока рассогласования, отличающаяся тем, что, с целью повышения ее быстродействия и точности, введены сумматор, последовательно соединенные модель компенсируемой части объекта регулирования с удвоенным статическим коэффициентом, и первый блок перемножения, последовательно, соединенные усилитель и первый порогога 1й элемент, последовательно соединенные выпрямитель, второй пороговый элемент и второй блок перемножения последовательно соединенные третий пороговый элемент и третий блок перемножения, пoдкJШЧeнный вторьм входом к выходу некомпенсируемой .части объекта регулирования, а вьвсодон к суммирунщему входу элемента сравнения, вычитающий вход и выход которого подключены соответственно к выходу первого блока перемножения и к первому входу сумматора, соединенного вторым входом с выходом статической модели некомпеисируе « й части объекта регулирования, вход усилителя соединен с выходсш пер-, вого блока сравнения, а вьскод - с входом выпрямителя и третьего порогового элемента; вход модели компен00 сируемой части объекта регулирова t ния с удвоенным статическим коэффици ч1 ентом подключен к выходу регулятора, а выход первого порогового элемента-i САЭ к второму входу первого блока переСП множения, второй вход и выход второго блока перемножения пoдкJDOчeны соответственно к выходу модели некомпенсируемой части объекта регулирования , соединенной входом с выходом сумматора, и к второму входу, второго блока сравнения.
| Печь для непрерывного получения сернистого натрия | 1921 |
|
SU1A1 |
| Догановский С.А | |||
| Вычислительные устройства в автоматических системах управления по возмущению | |||
| М., Энергия, 1964, с | |||
| Соломорезка | 1918 |
|
SU157A1 |
| Аппарат для очищения воды при помощи химических реактивов | 1917 |
|
SU2A1 |
| Боровиков И.А., Инешин А.П | |||
| Применение упреждающей коррекции в обыкновенных линеаризуемых системах автоматического регулирования | |||
| Известия ВУЗов, Электромеханика, № 9, 1972 (прототип). | |||
