Изобретение относится к электротехнике и может быть использовано при создании систем электроприводов в- металлургии, химической промышленности, машиностроении.
Цель изобретения - повышение динамической точности электропривода.
На чертеже изображена функциональная схема электропривода.
Электропривод содержит электродвигатель 1, подключенный к тиристорно- му преобразователю 2, задатчик 3 желаемых фазовых координат электропривода, выполненный в виде модели замкнутой системы электропривода,последовательно соединенные регулятор 4 и сумматор 5, второй вход которого соединен с выходом соответствующей фазовой координаты задатчика 3, а выход - с входом тиристорного преобразователя 2,при этом входы регулятора подключены через отдельные усилители 6 - 8 к выходам трех блоков ,9 - 11 сравнения (сумматоры), вычитающие входы которых подключены к выходам датчика 12 напряжения на якоре, датчика 13 тока якоря .и датчика
14скорости электродвигателя,а первые суммирующие входы - к выходам соответствуюшях фазовых координат задатчика 3.Электропривод содержит также последовательно соединенные модель 15 тиристорного преобразователя
и модель 16. электрической части электродвигателя, постоянные времени которых в 1,5-2,5 раза больше соответствующих реальных постоянных времени, причем вход модели 15 тиристорного преобразователя подключен к выходу регулятора 4, а выходы модели
15тиристорного преобразователя и модели 16 электрической части электродвигателя соединены с вторыми суммирующими входами соответственно блоков 9 и 10 сравнения.
Электропривод работает следуюш 1м образом.
До подачи задающего сигнала CxJ, на вход задатчика 3 сигнал управления и и желаемые фазовые координаты U, I и ш равны нулю. Текущие значения фазовых координат U,,,, to электропривода также равны нулю. Электропривод находится в состоянии покая.
При подаче задающего сигнала w, (возмущающее воздействие статистическая нагрузка электропривода равна нулю) в задатчике 3 формируются желаемые значения U , I, (о фазовых координат электропривода заданног о качества регулирования .Одновременно с формированием координат Un , I и Lo сигнал управления и с выхода задатчика 3 (выход регулятора задатчика) поступает на
второй суммирующий вход сумматора 5. Это обеспечивает на входе тиристорного преобразователя 2 сигнал управления, равный и . Если модели звеньев задатчика 3 точно соответствуют тиристорному преобразователю 2, электродвигателю 1 и датчику 14 скорости, то фазовые координаты U, 1 и U) будут равны желаемым фазовым координатам U , I и i,
т.е. имеем Un U, 1 1 и
LO UJ При этом на выходах сумматоров 9-11 будут нулевые сигналы, а следовательно, и на выходах усилителей 6 - 8 также будут нулевые сигналы, что обеспечивает суммарный нулевой сигнал на входе регулятора 4 и его выходе, т.е. ли 0. Равенство нулю сигнала. .,dU на выходе регулятора 4 обеспечивает и равенство
нулю поправок dU и jl, поступа- на вторые суммируюш 1е входы сумматоров 9 и 10 с выходов моделей 15 и 16 тиристорного преобразователя и электрической части электродвигателя.
При отработке статистической нагрузки, действующей на электродвигатель 1, первоначально возникает отклонение фазовой координаты ш от
ее желаемого значения w,a затем и координат Uj и I от своих желаемых значений U н I. Это приведет к тому,что на выходе регулятора 4 имеет место компенсационный сигнал
1U, стремяш1 йся, проходя через звенья электропривода, тиристорный преобразователь 2 и электрическую часть структуры электродвигателя 1, компенсировать возмущение (статистическую
нагрузку) . При этом U и I изменяются так,чтобы имела место компенсация статистической нагрузки,, т.е. при возрастании М;. - увеличение Up и I, а при уменьшении М. - уменьшение и и I. Для того,чтобы изменение Uf, и I в процессе отработки статистической нагрузки не вступало в противоречие с задачей компенсации возмущения,необходимо осуществлять
введение поправок к желаемым фазовым координатам О и . Это достигается тем,что на вход модели 15 тиристорного преобразователя поступает сигнал ли с выхода регулятора 4 ,
Постоянные времени модели 15 тиристорного преобразователя и модели 16 электрической части двигателя в 1,5-2,5 раза больше соответствующих реальных постоянных времени.Это необходимо для исключения компенсации действия обратных связей по и и I, а также для исключения возможности положительной обратной связи по и и I (при изменении параметров электропривода в процессе работы). Если этого не сделать,то система может оказаться неустойчивой. Модели 15 и 16 формируют поправки ли и Л1 в соответствии с характером возмущения, поступающие на вторые суммирующие входы сумматоров 9 и 10 (с некоторой инерционностью по сравнению с изменением ко- ордийат Un и I). В статике приращения фазовых координат U и I при действии нагрузки будут равиы соот- ветствую1цим поправкам фазовых координат ли и л I.
Введение поправок к желаемым фазовым координатам U и I в соответствии с действующей на электропривод нагрузкой обеспечивает отработку возмущения с высокой динамической .точностью и быстродействием, так как устраняется противоречие обратных связей по отклонениям координат U и I с задачей компенсации возмущения.
Редактор Л.Гратилло
Составитель В.Кузнецова
Техред Л.Сердюкова . Корректор А,Обручар
Заказ 4243/54Тираж 659Подписное
ВШ1ИПИ Государственного комитета СССР
по делам изобретений и открытий 113035, Москва, Ж-35, Раушская наб,, д. 4/5
Производственно-полиграфическое предприятие, г. Ужгород, ул. Проектная, 4
5
0
5
0
5
0
Формула изобретения
Электропривод постоянного тока, содержащий электродвигатель подключенный к тиристорному преобразователю, задатчик желаемых фазовых координат электропривода, выполненный в виде модели замкнутой системы элёктропри- ,вода, последовательно соединенные регулятор и сумматор,второй вход которого соединен с выходом соответствующей фазовой координаты задатчика, а выход - с входом тиристорного преобразователя, при этом входы регулятора подключены через отдельные усилители к выходам трех блоков сравнения, вычитающие входы которых подключены соответственно к выходам датчика напряжения на якоре, датчика тока якоря и датчика скорости электродвигателя, а первые суммирующие вхо- цы - к выходам соответствующих фазовых координат задатчика, отличающийся тем,что, с целью по- вьшения.динамической точности электропривода, в него введены последовательно соединенные модель тиристорного преобразователя и модель электрической части электродвигателя,постоянные времени которых в 1,5-2,5 раза больше соответствующих реальных постоянных времени,причем вход модели тиристорного преобразователя подключен к выходу регулятора,а выходы модели тиристорного преобразователя и модели электрической части электродвигателя соединены с вторыми суммирующими входами соответственно первого и второго блоков сравнения.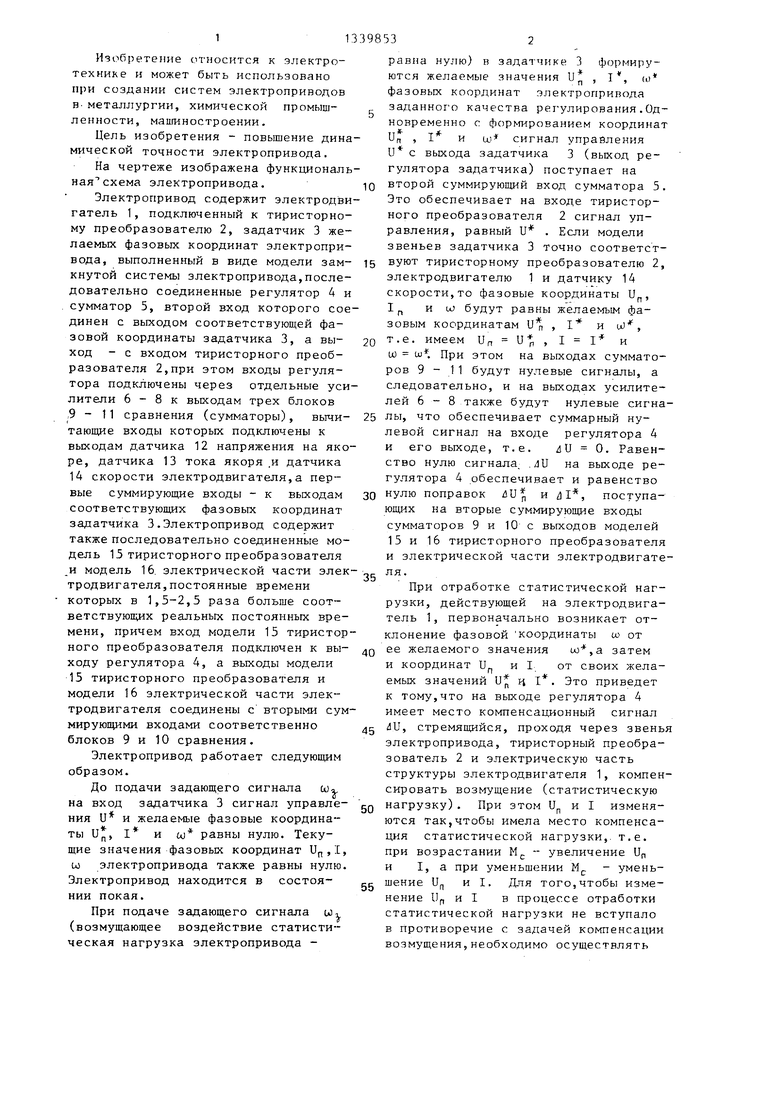
| название | год | авторы | номер документа |
|---|---|---|---|
| Электропривод постоянного тока | 1983 |
|
SU1169124A1 |
| Система автоматического регулирования скорости электропривода | 1983 |
|
SU1136289A1 |
| Система автоматического регулирования скорости электропривода | 1984 |
|
SU1277331A1 |
| Электропривод по системе генератор-двигатель | 1982 |
|
SU1078564A1 |
| Система поддержания заданного соотношения скоростей | 1983 |
|
SU1136291A1 |
| Электропривод постоянного тока | 1982 |
|
SU1061228A1 |
| Электропривод постоянного тока | 1984 |
|
SU1262672A1 |
| ЭЛЕКТРОПРИВОД ПОСТОЯННОГО ТОКА | 1990 |
|
RU2011286C1 |
| ЭЛЕКТРОПРИВОД ПОСТОЯННОГО ТОКА С УПРУГИМИ СВЯЗЯМИ | 2012 |
|
RU2513871C1 |
| УСТРОЙСТВО ДЛЯ АВТОМАТИЧЕСКОГО УПРАВЛЕНИЯ ЭЛЕКТРОМЕХАНИЧЕСКОЙ СИСТЕМОЙ С ВЯЗКОУПРУГОЙ КИНЕМАТИЧЕСКОЙ СВЯЗЬЮ | 2010 |
|
RU2446552C2 |
Изобретение относится к электротехнике и может быть использовано при создании систем управления электродвигателями в металлургии, химической промышленности. Целью изобретения является повьшение динамической точности электропривода. Устройство содержит последовательно соединенные модель 15 тиристорного преобразователя.и модель 16 электрической части электродвигателя. Вход модели 15 подключен к выходу регулятора 4, а выходы моделей 15 и 16 соединены с вторыми суммирующими входами соответственно блоков 9 и .10 сравнения. Введение поправок к желаемым фазовьгм координатам в соответствии с действующей на электропривод нагрузкой обеспечивает отработку возмущения с высокой динамической точностью и быстродействием. 1 ил. сл со оо со 00 ел со
| Жиляков В.И | |||
| Исследование особых режимов релейных систем управления | |||
| - Изв | |||
| вузов | |||
| Электромеханика, 1983, № 8, с.78-83 | |||
| Система автоматического регулирования скорости электропривода | 1984 |
|
SU1277331A1 |
| Аппарат для очищения воды при помощи химических реактивов | 1917 |
|
SU2A1 |
