Изобретение относится к электротехнике и может быть использовано в электроприводах постоянного тока.
Цель изобретения - повышение КПД электропривода.
На чертеже приведена функциональная схема электропривода.
Электропривод постоянного тока содержит электродвигатель 1 подключенный к вентильному преобразователю 2, датчик 3 частоты вращения и датчик А тока якоря электродвигателя 1, датчик 5 ЭДС преобразователя 2,, датчик 6 положения, установленный на валу электродвигателя 1, последовательно соединенные первый сумматор 7, вторлй сумматор 8, регулятор 9 положения, третий сумматор 10, регулятор 11 частоты вращения, четвертый сумматор 12 и регулятор 13 тока. Причем выходы датчиков 5 ЭДС преобразователя, 4 тока якоря и 3 частоты вращения электродвигателя подключены к входам третьего 10 и четвертого 12сумматоров, выход датчика 6 положения соединен с входом первого сумматора 7, второй вход которого связан с блоком задания. Электропривод также содержит модель 14 линейной части электропривода и последовательно соединенные интегратор 15 и нелине:йное звено 16 типа релейная зона нечувствительности, выход которого подключен к входу преобразователя 2, вход интегратора 15 соединен с входами второго 8, третьего 10 и -четвертого 12 сумматоров н входогм модели 14 линейной чисти электропривода, выход которой подключен к входу второго сумматора 8.
Электропривод работает следующим образом.
, Задающий сигнал поступает на вход первого сумматора 7, При наличии большого сигнала ошибки на яыходе первого сумматора 7 регулятор 9 полоения переключается в одно из устойчивых состоянийJ определяющееся поярностью указанного сигнала омибки. При этом с выхода регулятора положения поступает напряжение на последоательно включенные регулятор 11 частоты вращения и регулятор 13 тока, оторые первоначально переключаются акже в одно из устойчивьгх состояний. ри достижении током уровня задания (который определяется напряжением на ыходе регулятора 1 1 частоты враще ния регулятор 13 тока под действием сигналов обратных связей с выходов датчиков 3-5 входит в скользящий режим, стабилизируя ток, а при достижеНИИ частотой вращения уровня задания (который , определяется напряжением на вьЕходе регулятора 9 положения) в скользящий режим переводится регулятор частоты вращения, стабилизируя частоту вращения на заданном уровне. Величина сигнала ошибки по поло кению на выходе устройства сравнения непрерывно уменьшается. Когда напряжение на выходе второго сумматора 8 становится равным нулю, регулятор 9 положения переводится в скользящий режим, осуществляя точное позиционирование вала электродвигателя 1 в заданное положение. Передаточная функ® ция модели 14 линейной части электропривода имеет вид:
, ч + а + ао 5 т;р Т)(Т:Т, Т)
где ау,а,,а„ - коэ(1)фициенты, зависящие от параметров электропривода и характера желаемой нас0тройки регулятора положения;Т,Тд и Т, - постоянная времени
преобразователя, якорной цепи и электроме5ханкческая постоянная
времени двигателя. Включение обратных связей с выхода интегратора 15 на входы сумматоров 8, 10 и 12 обеспечивает компенсацию вли0 яния малой постоянной времени интегратора 15 на величины частот скользящего режима регуляторов. Статическая характеристика вентильного широтноимпульсного преобразователя 2 такова, 5 что в зависимости от величины напрялсения на выходе нелинейного звена 16 напряжение на выходе преобразователя принимает одно из трех значений: Ln
Un О, где
-и
.с; UH
макс
SO «акс величина напряжения сети постоянного тока.
При обработке пефемещения рабочая частота коммутации широтно-импульсного вентильного преобразователя 2
ijg (которая является частотой скользящего режима регуляторов тока, частоты вращения и положения) определяется временем о прохож ения напряжения на 3 выходе интегратора 15 ширины зоны нечувствительности нелинейного элемента 16 При завершении отработки заданно го перемещения, т.е. в режиме Стоп напряжение на выходе становится рав ным нулю. Как следствие этого, скол зящий режим замыкается внутри конту ра, включающего модель 14 линейной части электропривода. Частота сколь зящего режима резко возрастает, пос кольку из контура регулирования исключается запаздывание , вносимое последовательно включенными интегра тором 15 и нелинейным звеном 16, и частота скользящего режима определя ется только малыми постоянными времени указанного контура и гистерези сом релейного регулятора. При таком увеличении частоты переключения релейньпс регуляторов амплитуда напряжения на выходе интегратора 15 резко уменьшается, а его среднее значение равно нулю. При этом напряжение на выходе нелинейного звена 16 оказьшается равным нулю и напряжени на выходе широтно-импульсного вентильного преобразователя тоже равно нулю, т.е. силовые вентили заперты и коммутация преобразователя прекращается. При этом коммутационные потери отсутствуют. 24 Формула изобретения Электропривод постоянного тока, содержащий электродвигатель, подключенный к вентильному преобразоватег лю, датчик частоты вращения и датчик тока якоря электродвигателя, датчик ЭДС преобразователя, датчик положения, установленный на валу электродвигателя, последовательно соединенные первый сумматор, второй сумматор, регулятор положения, третий сумматор, регулятор частоты вращения, четвертый сумматор и регулятор тока, выход ко-торого связан с входом преобразователя, причем выходы датчиков ЭДС преобразователя, тока якоря и частоты вращения электродвигателя подключены к входам третьего и четвертого сумматоров, выход датчика положения соединен с входом первого сумматора, второй вход которого связан с блоком задания, отличающийся тем, что, с целью повышения КПД электропривода, в него введены модель линейной части электропривода и последовательно соединенные интегратор и нелинейное звено типа релейная зона нечувствительности, выход которого подключен к входу преобразователя, вход интегратора соединен с входакш второго, третьего и четвертого сумматоров и входом модели линейной части электропривода, выход которой подключен к входу второго сумматора.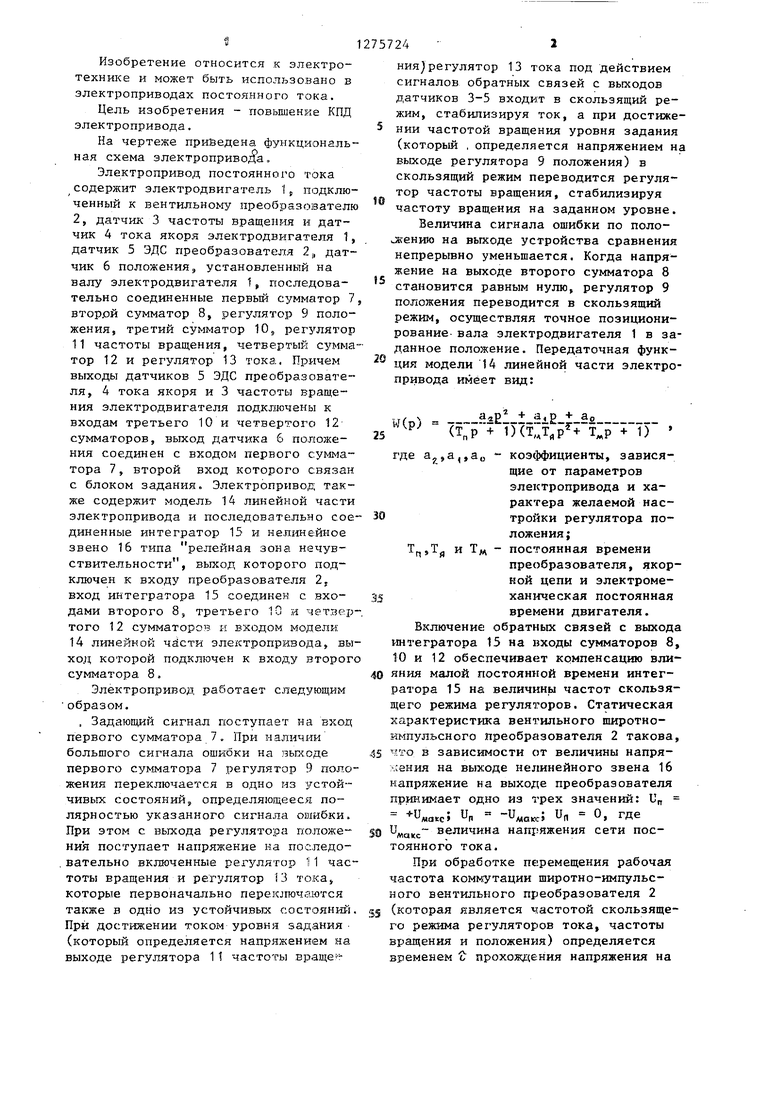

| название | год | авторы | номер документа |
|---|---|---|---|
| Электропривод постоянного тока | 1984 |
|
SU1264287A1 |
| ЭЛЕКТРОПРИВОД ПОСТОЯННОГО ТОКА | 1990 |
|
RU2011286C1 |
| Реверсивный вентильный электропривод | 1982 |
|
SU1138913A1 |
| Реверсивный вентильный электропривод | 1983 |
|
SU1141552A1 |
| Частотно-регулируемый электропривод | 1982 |
|
SU1023606A1 |
| Способ защиты обмотки якоря электродвигателя от перегрева и устройство для его осуществления | 1984 |
|
SU1279010A1 |
| Вентильный электропривод | 1985 |
|
SU1274105A1 |
| Реверсивный электропривод с двухзонным регулированием частоты вращения | 1978 |
|
SU780135A1 |
| Электропривод с двухзонным регулированием скорости | 1983 |
|
SU1185516A1 |
| УСТРОЙСТВО ДЛЯ АВТОМАТИЧЕСКОГО УПРАВЛЕНИЯ ЭЛЕКТРОМЕХАНИЧЕСКОЙ СИСТЕМОЙ С ВЯЗКОУПРУГОЙ КИНЕМАТИЧЕСКОЙ СВЯЗЬЮ | 2010 |
|
RU2446552C2 |

| Гольц М.Е | |||
| и др | |||
| Автоматизированные электроприводы постоянного т ка с широтно-импульсными преобразователями | |||
| - М.: Энергия, 1972, с | |||
| Приспособление для точного наложения листов бумаги при снятии оттисков | 1922 |
|
SU6A1 |
| Некоторые особенности технической реализации алгоритмов опти мального управления | |||
| - В сб.: Электромашиностроение и электрооборудов ние, Киев; Техника, 1977, вып | |||
| Видоизменение пишущей машины для тюркско-арабского шрифта | 1923 |
|
SU25A1 |
| Насос | 1917 |
|
SU13A1 |
