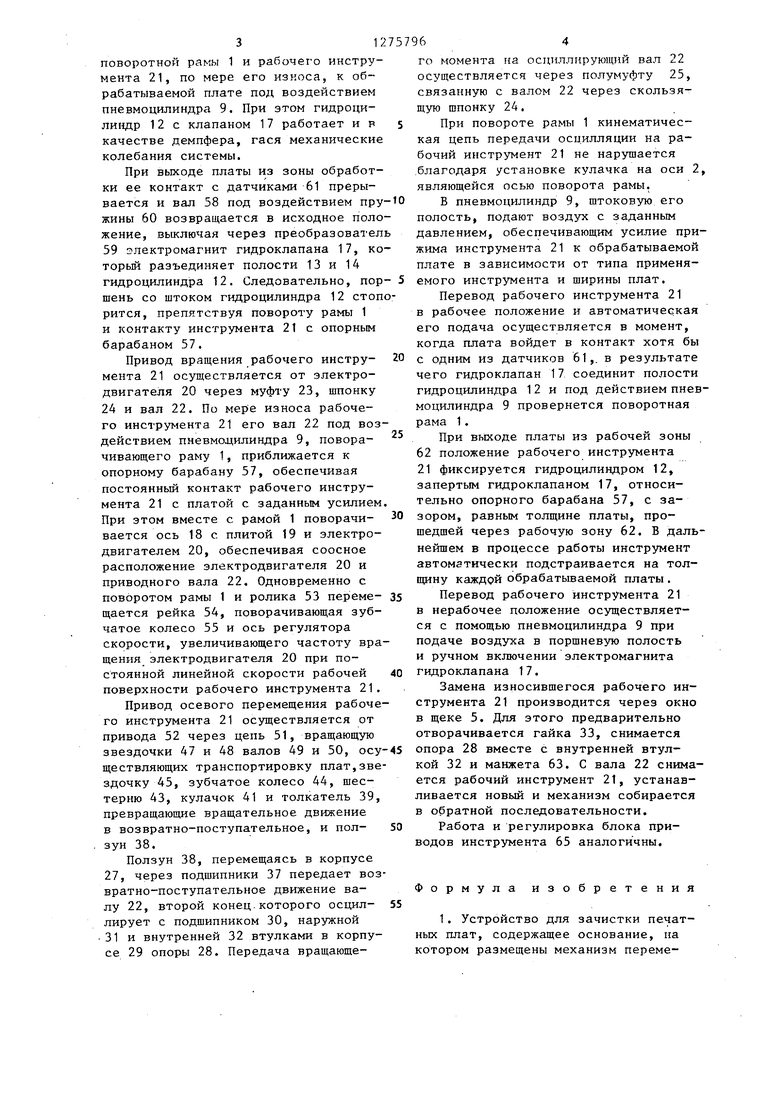
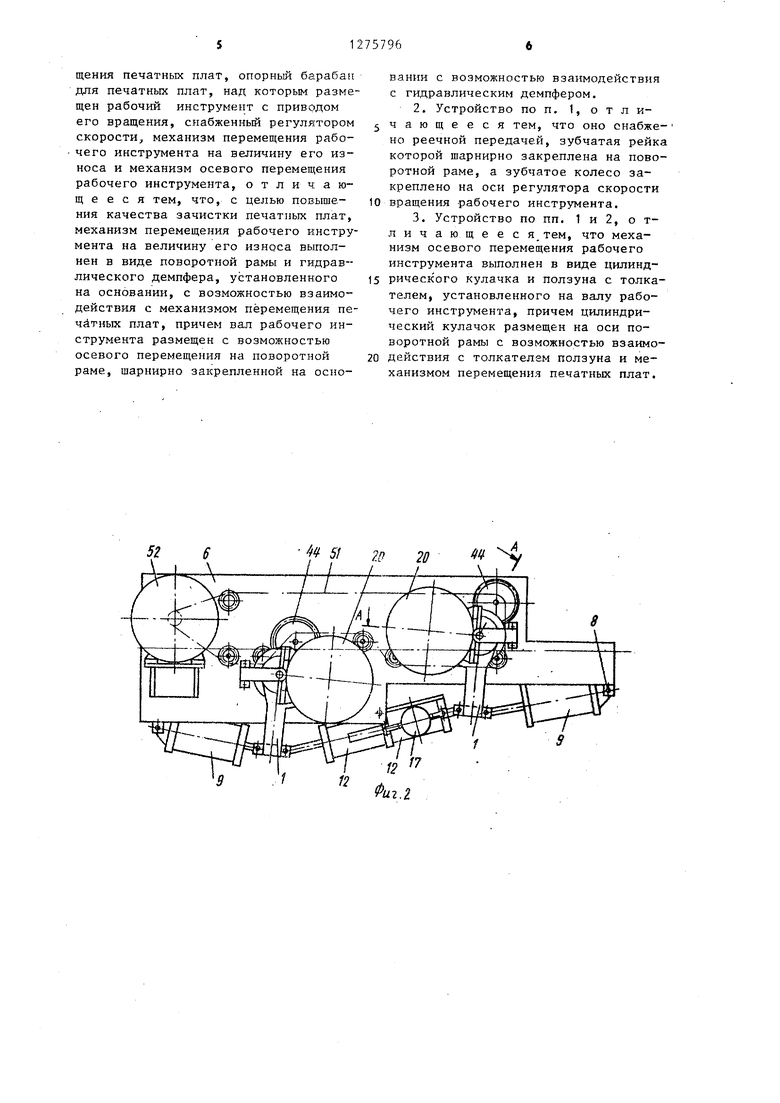
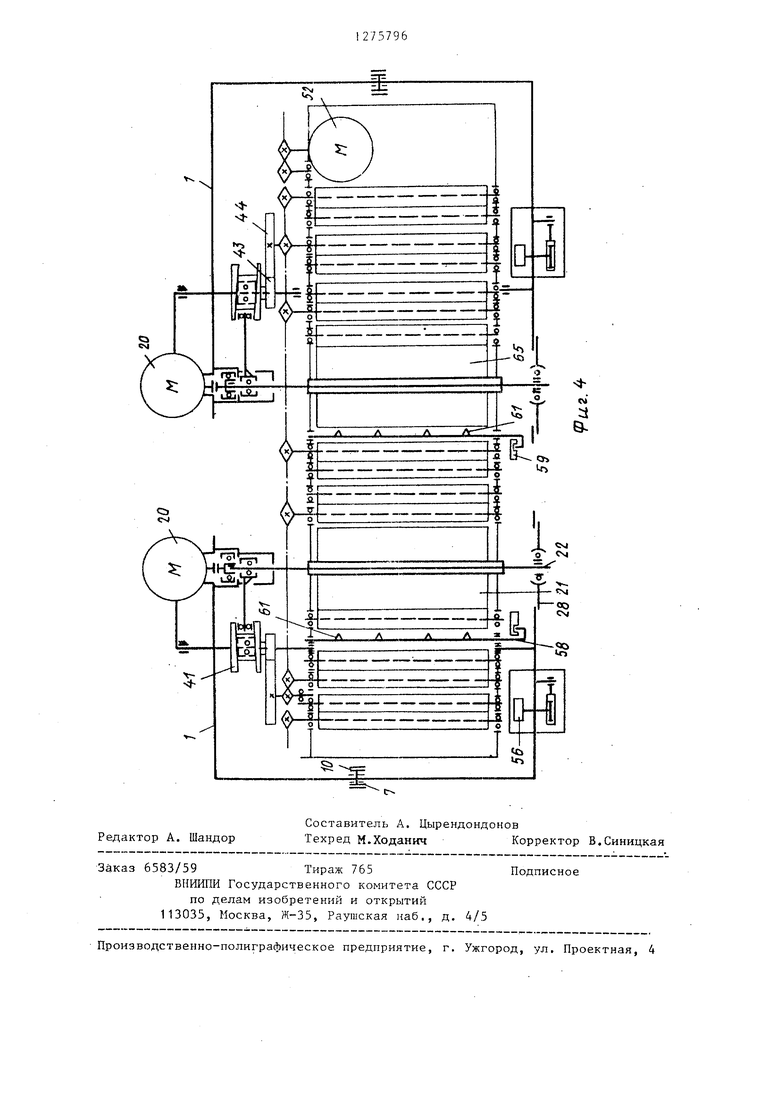
Изобретение относится к производству радиоэлектронной -аппаратуры, а именно к устройствам для изготовлени печатных плат. Целью изобретения является повышение качества зачистки печатных плат путем обеспечения постоянного усилия прижима рабочего инструмента к поверхности печатньк плат и улучшения равномерности обработки печатных плат по ширине. На фиг, 1 и 2 изображено устройство для зачистки печатных плат, на фиг. 3 - сечение А-А на фиг. 2} на на фиг. 4 г- кинематическая схема предложенного устройства,. Устройство для зачистки печатных плат содержит механизм перемещения рабочего инструмента на величину его износа, выполненный в виде поворотной рамы 1, установленной осью 2 во втулках 3 и А щек 5 и б основа 1пл н дополнительно связанной со щеками с помощью шарнприв 7 и 8 с пнсвмо-цшшидром 9s а через шарниры 10 и 1 с гидравлическим дел-тфером, выполненным в вяде гидроцилпндра 12 с дву сторонним mroKotjj рабочие полости 13 и 14 KOTOpovo заполнен. рабочей ;;(пдкостью и соединены между coCofi через трубопроводы 15 и 16 и ;meKTi OMnjHUT ный гидроклакан 17. На поворотной раме i, соосни с ее осью 2, жестко установлена одиим кон цом ось 18, а второй конад шарнприо соединен со .щекой 6. На оси 18 яакреплена п.лита 19, на косоро. установлен электродв11гател.ь 20 пр1пюда -мращения рабочего инструмента 21 для зачистки верхней поверхности печатных плат, Один конед вала 22 инструмента 21 соединен с вялом электродвигателя 20 МУФТО.Й 23 н шпонкой 24, полумуфта 25 когср(й установлена на подшипниках 26 в корпусе 27 поворотной рамы . Второй конед вала 22 установ.п.;-.н э съемной опоре 28, закреп.пениоЛ на поворотной раме 1 и состонпг.ей нз- кор пуса 29, подшипника 30, наружной 31 и внутре.чней 32 втулок. На валу 22 закреплен гайкой 33 рабочий инструмент 215 состо.чщнй из зачистных 3JtiiC тичных дисков .34,/ зафиксиро запнь1х па огфавке 35 гайкой 36, „На валу 22 также устяног.шен на подшипниках 37 ползун 38 механизма осевого перемещения рабочего инструмен62та с толкателем 39, подпшпник /О которого контактирует с пазом цшг-;дрического кулачка 41, которьй, в свою очередь, установлен на подшипниках 42 оси 2. Кулачок 41 жестко соединен с шестерней 43, входящей в зацепление с зубчатым колесом 44, установленным вместе со звездочкой 45 на валу 46, закрепленным на щеке 6, а звездочка 45 и звездочки 47 и 48 (верхние и нижние), установленные на верхних и нижних валах 49 и 5,0, цепью 51 соединены с приводом 52 механизма перемещения печатньпс ппат. На подвижной раме 1 установлен ролик 53, контактирующий с пазом зубчачатой рейки 54, входящей в зацепление с зубчатым колесом 55, устанрвле1П1ьм на оси регулятора 56 скорости электродвигателя 20 привода вращения рабочего инструтлента 21, В щеках 5 н 6 шаринрно установлены опорньш барабат 57 и вал 58, который дополнительно со щекой 5, на которой установлен преобразователь 59. связан пру;-киной 60. На валу 58 установлены пружинные датчики 61, коптакт.ирующие с обрабатываемыми печатными ш атами. Окна в щеках 5 и 6 вькода вала 22 и. рлбопей зоны 62 закрыты манжетлг - 63 и 64 с гофрированныг-ш поверхгЮСТЯМИ, Лналогт1чно устроены механизмы .oji;oB м инструмента 65 для зачистки 11ил;ней поверхности п(гчатных плат. З -тройство для зачистки печатных iLiiaT работает следующим образом. Привод подачи рабочего инструмента к обрабатываемой поверхности осуществляется с помощью пневмоцилиндра 9, При подаче сжатого воздуха D его штоковую полость odecneiftiBaется рабочего инструмента 21 к плате, находящейся в зоне обработки между рабочим инструментом 21 и опорньм барабаном 57. Благодаря контакту платы хотя бы с одним из датчиков 61 вал 58, поворачиваясь, воздействует на преобразователь 59, который, в свою очередь, включает электромагнит гидроклапаиа 17, Рабочая жидкость гидродилиндра 12, перетекая пз по.лости 14 в полость 13 через трубопроводы 16 и 15, гидроклапан 17, обеспечивает возможность перемещения поршня гидроцилиндра 12, его штока.
поворотной рамы 1 и рабочего инструмента 21, по мере его износа, к обрабатываемой плате под воздействием пневмоцилиндра 9. При этом гидроцилиндр 12 с клапаном 17 работает ИР качестве демпфера, гася механические колебания системы.
При выходе платы из зоны обработки ее контакт с датчиками 61 прерывается и вал 58 под воздействием пру жины 60 возвращается в исходное положение, выключая через преобразовател 59 электромагнит гидроклапана 17, которьй разъединяет полости 13 и 14 гидроцилиндра 12. Следовательно, пор шень со штоком гидроцилиндра 12 стопрится, препятствуя повороту рамы 1 и контакту инструмента 21 с опорным барабаном 57.
Привод вращения рабочего инструмента 21 осуществляется от электродвигателя 20 через муфту 23, шпонку 24 и вал 22. По мере износа рабочего инструмента 21 его вал 22 под воздействием пневмолдилигздра 9, поворачивающего раму 1, приближается к опорному барабану 57, обеспечивая постоянный контакт рабочего инструмента 21 с платой с заданным усилием При этом вместе с рамой 1 поворачивается ось 18 с плитой 19 и электродвигателем 20, обеспечивая соосное расположение электродвигателя 20 и приводного вала 22. Одновременно с поворотом рамы 1 и ролика 53 перемещается рейка 54, поворачивающая зубчатое колесо 55 и ось регулятора скорости, увеличивающего частоту вращения электродвигателя 20 при постоянной линейной скорости рабочей поверхности рабочего инструмента 21.
Привод осевого перемещения рабочего инструмента 21 осуществляется от привода 52 через цепь 51, вращающую звездочки 47 и 48 валов 49 и 50, осуществляющих транспортировку плат,звездочку 45, зубчатое колесо 44, шестерню 43, кулачок 41 и толкатель 39, превращающие вращательное движение в возвратно-поступательное, и ползун 38.
Ползун 38, перемещаясь в корпусе 27, через подшипники 37 передает возвратно-поступательное движение валу 22, второй конец.которого осциллирует с подшипником 30, наружной 31 и внутренней 32 втулками в корпусе 29 опоры 28. Передача вращающего момента на осциллирующий вал 22 осуществляется через полумуфту 25, связанную с валом 22 через скользящую шпонку 24.
При повороте рамы 1 кинематическая цепь передачи осцилляции на рабочий инструмент 21 не нарушается благодаря установке кулачка на оси 2 являющейся осью поворота рамы.
В пневмоцилиндр 9, штоковую его полость, подают воздух с заданньм давлением, обеспечивающим усилие прижима инструмента 21 к обрабатываемой плате в зависимости от типа применяемого инструмента и ширины плат.
Перевод рабочего инструмента 21 в рабочее положение и автоматическая его подача осуществляется в момент, когда плата войдет в контакт хотя бы с одним из датчиков 61,. в результате чего гидроклапан 17 соединит полости гидроцилиндра 12 и под действием пневмоцилиндра 9 провернется поворотная рама 1.
При выходе платы из рабочей зоны 62 положение рабочего инструмента 21 фиксируется гидроцилиндром 12, запертым гидроклапаном 17, относительно опорного барабана 57, с зазором, равным толщине платы, прошедшей через рабочую зону 62. В дальнейшем в процессе работы инструмент автоматически подстраивается на толщину каждой обрабатываемой платы .
Перевод рабочего инструмента 21 в нерабочее положение осуществляется с помощью пневмоцилиндра 9 при подаче воздуха в поршневую полость и ручном включении электромагнита гидроклапана 17.
Замена износившегося рабочего инструмента 21 производится через окно в щеке 5. Для этого предварительно отворачивается гайка 33, снимается опора 28 вместе с внутренней втулкой 32 и манжета 63. С вала 22 снимается рабочий инструмент 21, устанавливается новый и механизм собирается в обратной последовательности.
Работа и регулировка блока приводов инструмента 65 аналогичны.
Формула изобретения
1. Устройство для зачистки печатных плат, содержащее основание, па котором размещены механизм перемещения печатных плат, опорньй барабан для печатных плат, над которым размещен рабочий инструмент с приводом его вращения, снабженный регулятором скорости, механизм перемещения рабочего инструмента на величину его износа и механизм осевого перемещения рабочего инструмента, отличающееся тем, что, с целью повышения качества зачистки печатных плат, механизм перемещения рабочего инструмента на величину его износа выполнен в виде поворотной рамы и гидравлического демпфера, установленного на основании, с возможностью взаимодействия с механизмом перемещения печйтных плат, причем вал рабочего инструмента размещен с возможностью осевого перемещения на поворотной раме, шарнирно закрепленной на основании с возможностью взаимодействия с гидравлическим демпфером.
2.Устройство по п, 1, о т л ичающееся тем, что оно снабжено реечной передачей, зубчатая рейка которой шарнирно закреплена на поворотной раме, а зубчатое колесо закреплено на оси регулятора скорости
вращения рабочего инструмента.
3.Устройство по пп. 1 и 2, о тличающеес , что механизм осевого перемещения рабочего инструмента выполнен в виде цилиндрического кулачка и ползуна с толкателем, установленного на валу рабочего инструмента, причем цилиндрический кулачок размещен на оси поворотной рамы с возможностью взаимодействия с толкателем ползуна и механизмом перемещения печатных плат.
| название | год | авторы | номер документа |
|---|---|---|---|
| УСТРОЙСТВО ДЛЯ МЕХАНИЧЕСКОЙ ЗАЧИСТКИ ПОВЕРХНОСТЕЙ | 1991 |
|
RU2022672C1 |
| Автомат для зачистки острых кромок | 1984 |
|
SU1220745A1 |
| Устройство для механической зачистки поверхностей | 1983 |
|
SU1107906A1 |
| ПРИВОДНАЯ СТАНЦИЯ ДЛЯ СТРУГОВЫХ УСТАНОВОК | 1997 |
|
RU2122114C1 |
| УСТРОЙСТВО ДЛЯ МЕХАНИЧЕСКОЙ ЗАЧИСТКИ ПОВЕРХНОСТЕЙ | 1991 |
|
RU2024334C1 |
| Станок для намотки катушек электрических машин на ребро | 1985 |
|
SU1310957A1 |
| МАШИНА ДЛЯ ВЫГРУЗКИ СЫПУЧИХ МАТЕРИАЛОВ ИЗ ЖЕЛЕЗНОДОРОЖНЫХ ВАГОНОВ | 1991 |
|
RU2057700C1 |
| САМОХОДНАЯ УСТАНОВКА ДЛЯ ВОЗВЕДЕНИЯ АНКЕРНОЙ КРЕПИ | 2021 |
|
RU2765002C1 |
| Устройство для установки радиоэлементов на печатные платы | 1988 |
|
SU1631766A1 |
| КОЛЕСНАЯ БРОНЕМАШИНА | 2005 |
|
RU2314478C2 |
Изобретение относится к области производства радиоэлектронной аппаратуры. Цель - повышение качества зачистки печатных плат (ПП). Устройство для зачистки ПП содержит механизмы (М) перемещения ПП, перемещения рабочего инструмента (РИ) на величину его износа, осевого перемещения РИ, приводы и инструмент для зачистки верхней и нижней поверхности ПП.Цель достигается тем,что М перемещения РИ на величину его износа выполнен в виде поворотной рамы 1, установленной осью 2 во втулках щек основания и дополнительно связанной со щеками посредством шарниров 7, 8 с пневмоцилиндром .9, а через шарниры 10, 11 с гидравлическим демпфером, связанным с М перемещения ПП. Для вращения РИ использована реечная передача. В описании дана конструкция М осевого перес е мещения РИ.-Устройство обеспечивает постоянноеусилие прижима РИ к по(Л верхности ПП и улучшает равномерность обработки ПП по ширине. 2 з.п. ф-лы. 4 ил. СП СО О5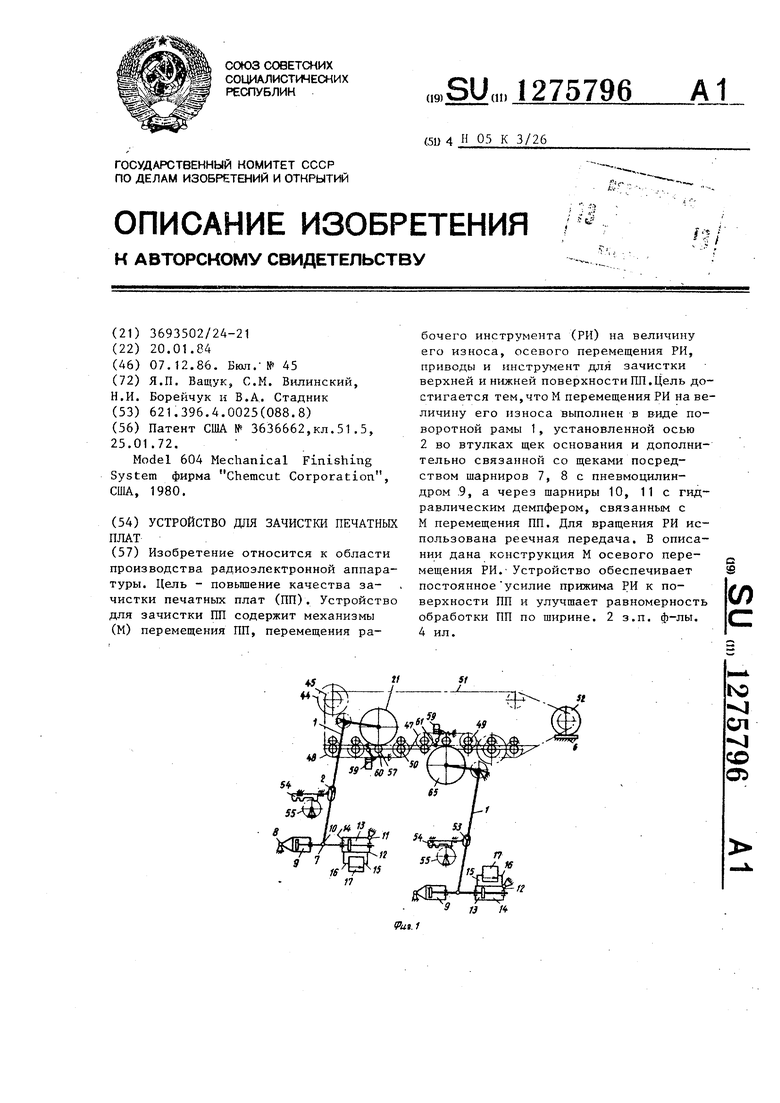
5 2Р 20 « 11/ /
Si ri 1
CSi
| Патент США № 3636662,кл.51.5, 25.01.72 | |||
| ЖЕЛЕЗНЫЙ КАРКАС ДЛЯ ЭЛЕКТРОДВИГАТЕЛЯ | 1922 |
|
SU604A1 |
