Изобретение относится к сельскому хозяйству, в частности к устройствам автоматизации почвообрабатывающих машин.
Цель изобретения - исключение нежелательного смещения подъемного механизма.
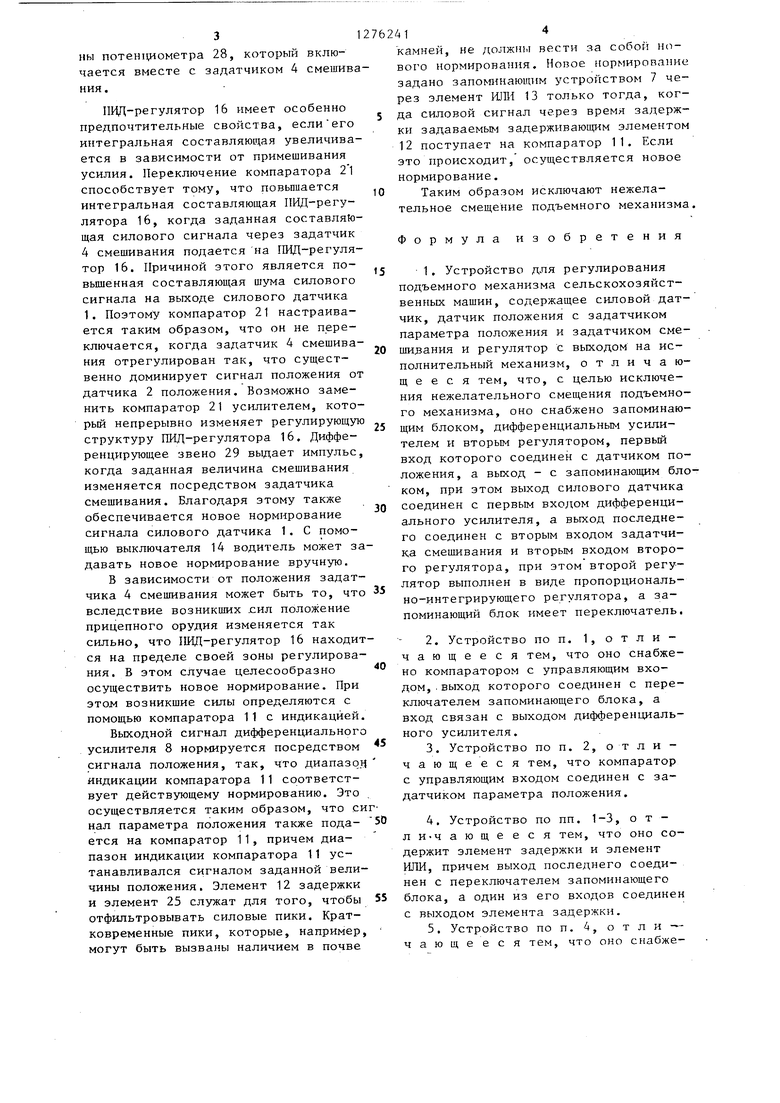
На фиг. 1 представлено устройство для регулирования механизмов сельскохозяйственных машин; на фиг. 2 - то же,с компаратором.
Устройство содержит силовой датчик 1, датчик 2 положения с задатчиком 3 параметру положения, задатчик 4 смешивания и регулятор 5, исполнительный механизм 6, запоминающий блок 7, дифференциальньш усилитель 8, второй регулятор 9, выполненный в виде пи-регулятора, а запоминающий блок 7 имеет.переключатель 10. Устройство снабжено компаратором 11 с управляющим входом, а также элементом 12 задержки, элементом ИЛИ 13, ручным выключателем 14, схемой 15 приоритета, ПИД-регулятором 16.
Схема 15 приоритета содержит параллельно включенные диод 17, резистор 18 и конденсатор 19. Задатчик 4 смешивания связан со смесителем 20. Компаратор 21 связан с диодами 22 и 23 и резистором 24. Элемент И 25 связан с входом элемента ИЛИ 13. Дифференцирующее звено 26 связано с триггером 27.
Потенциометр 28 связан с дифференцирующим звеном 29. Компаратор 30 выходом связан с триггером 27, а датчик 2 положения связан с задатчиком 3 параметра положения через резисторы 31 и 32.
Устройство работает следующим образом.
Если в работу включен задатчик 3 параметра положения, дифференцирующе звено 25 подает сигнал на ПИД-регулятор 16, при изменении положения рабочего органа сельскохозяйственной мащины срабатывает триггер 27 и одновременно с этим через диод 17 заряжается конденсатор 19.
Диоды 22 и 23 образуют вместе с резистором 24 схему определения максимальных величин. Только максимальная величина, которая поступает к диодам 22 или 23, попадает на вход компаратора 21. Если установлен триггер 27, эта величина имеется на диоде 22. Эта величина служит также для
установки потенциометра второго смесителя 20. Если при этом установлен триггер 27, то на управляющем входе второго смесителя 22 имеется очень
большая величина. Это означает, что потенциометр смесителя 20 установлен так, что только сигнал положения от датчика 2 положения поступает на ПИД-регулятор 16. С помощью определения максимальной величины достигается то, что выходная величина триггера 27 подается на компаратор 21. Через выход компаратора 21 регулирующая структура ПИД-регулятора 16
5 настраивается таким образом, что он имеет только очень слабую интегральную составляющую, т.е. в сущности работает как ДД-регулятор (пропорциональный регулятор с воздействием
0-по производной). Прицепное орудие из первоначального положения очень быстро занимает желаемое, положение. Если отклонение регулирования на вькоде ПВД-регулятора 16 близко к нулю, это определяется с помощью компаратора 30 с индикацией, через выход которого переключается триггер 27, после чего переключается элемент ИЛИ 13 и величина, поданная на выход ПИ-регулятора 9, передается в накопитель запоминающего устройства 7. Конденсатор 19 медленно разряжается через резистор 18. Благодаря этому процессу разрядки потенциометр смесителя
20 медленно перемещается до тех пор, пока он при разряженном конденсаторе 19 не установится так, что только вход задатчика 4 смешивания через по(тенциометр смесителя 20 попадает
0 вход ПИД-регулятора .16. Такой переходный процесс способствует тому,
что переключение от регулирования положения к смешанному регулированию происходит не сразу, а переход осу5 ществляется плавно по переходной функции. Эта переходная функция может быть как угодно сложной. Однако выбор 1-функции дает наиболее простой вид схемы. После разрядки
0 конденсатора 19 параметр от задатчика 4 смешивания включает непосредственно ПИД-регулятор 16. В заданное время напряжение на диоде 22 превышает величину напряжения, поданного
5 на диод 23. Переключается компаратор 21 так, что регулирующая структура ПВД-регулятора 16 изменяется. Напря жение на диоде 23 зависит от величины потенциометра 28, который включается вместе с задатчиком 4 смешив ния. ИИД-регулятор 16 имеет особенно предпочтительные свойства, если его интегральная составляющая увеличива ется в зависимости от примешивания усилия. Переключение компаратора 21 способствует тому, что повьпиается интегральная составляющая ПИД-регулятора 16, когда заданная составляй щая силового сигнала через задатчик 4 смешивания подается на ГИД-регуля тор 16. Причиной этого является повышенная составляющая шума силового сигнала на выходе силового датчика 1. Поэтому компаратор 21 настраивается таким образом, что он не переключается, когда задатчик 4 смешива ния отрегулирован так, что существенно доминирует сигнал положения о датчика 2 положения. Возможно заменить компаратор 21 усилителем, кото рый непрерывно изменяет регулирующую структуру ПИД-регулятора 16. Дифференцирующее звено 29 выдает импульс когда заданная величина смешивания изменяется посредством задатчика смешивания. Благодаря этому также обеспечивается новое нормирование сигнала силового датчика 1. С помощью выключателя 14 водитель может за давать новое нормирование вручную. В зависимости от положения задатчика 4 смешивания может быть то, что вследствие возникших .сил положение прицепного орудия изменяется так сильно, что ПИД-регулятор 16 находит ся на пределе своей зоны регулирования. В этом случае целесообразно осуществить новое нормирование. При этом возникшие силы определяются с помощью компаратора 11 с индикацией Выходной сигнал дифференциального усилителя 8 нормируется посредством сигнала положения, так, что диапазол индикации компаратора 11 соответствует действующему нормированию. Это осуществляется таким образом, что си нал параметра положения также подается на компаратор 11, причем диапазон индикации компаратора 11 устанавливался сигналом заданной величины положения. Элемент 12 задержки и элемент 25 служат для того, чтобы отфильтровывать силовые пики. Кратковременные пики, которые, например, могут быть вызваны наличием в почве камней, не должны вести за собой нового нормирования. Новое нормирование задано запоминающим устройством 7 через элемент ШБ1 13 только тогда, когда силовой сигнал через время задержки задаваемым задерживающим элементом 12 поступает на компаратор 11. Если это происходит, осуществляется новое нормирование. Таким образом исключают нежелательное смещение подъемного механизма. Формула изобретения 1.Устройство для регулирования подъемного механизма сельскохозяйственных машин, содержащее силовой датчик, датчик положения с задатчиком параметра положения и задатчиком смешизания и регулятор с выходом на исполнительный механизм, отличающееся тем, что, с целью исключения нежелательного смещения подъемного механизма, оно снабжено запоминающим блоком, дифференциальным усилителем и вторым регулятором, первый вход которого соединен с датчиком положения, а выход - с запоминающим блоком, при этом выход силового датчика соединен с первым входом дифференциального усилителя, а выход последнего соединен с вторым входом задатчика смешивания и вторым входом второго регулятора, при этом второй регулятор выполнен в виде пропорционально-интегрирующего регулятора, а запоминающий блок имеет переключатель. 2.Устройство по п. 1, о т л и чающееся тем, что оно снабжено компаратором с управляющим входом, .выход которого соединен с переключателем запоминающего блока, а вход связан с выходом дифференциального усилителя. 3.Устройство по п. 2, отличающееся тем, что компаратор с управляющим входом соединен с задатчиком параметра положения. 4.Устройство по пп. 1-3, о т л ИЧ а ю щ е е с я тем, что оно содержит элемент задержки и элемент ИЛИ, причем выход последнего соединен с переключателем запоминающего блока, а один из его входов соединен с выходом элемента задержки. 5.Устройство по п. 4, о т л и -чающе еся тем, что оно снабжено ручным выключателем, связанным с вторым входом элемента ИЛИ.
6. Устройство по пп. 1-5, о т л и чающееся тем, что оно снабжено схемой приоритета и пропор
ционально-интегрально-дифференцирующим регулятором, один вход которого соединен с первым регулятором, при этом один вход последнего связан с эадатчиком положения через схему приоритета.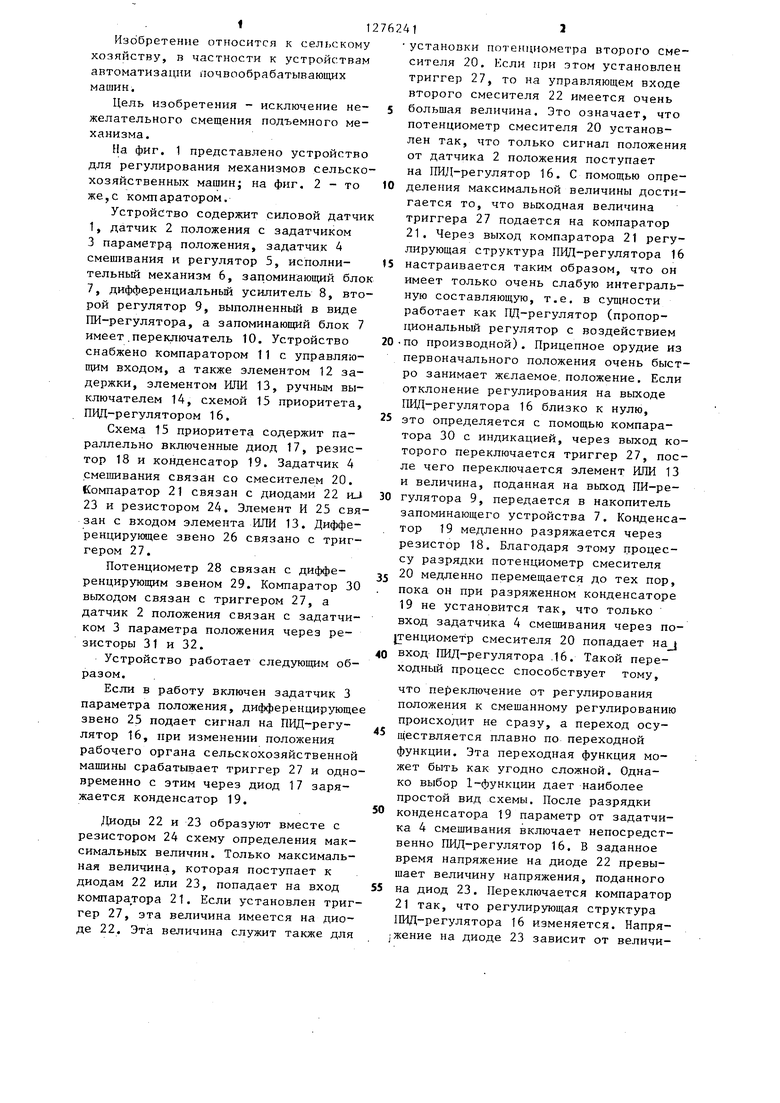
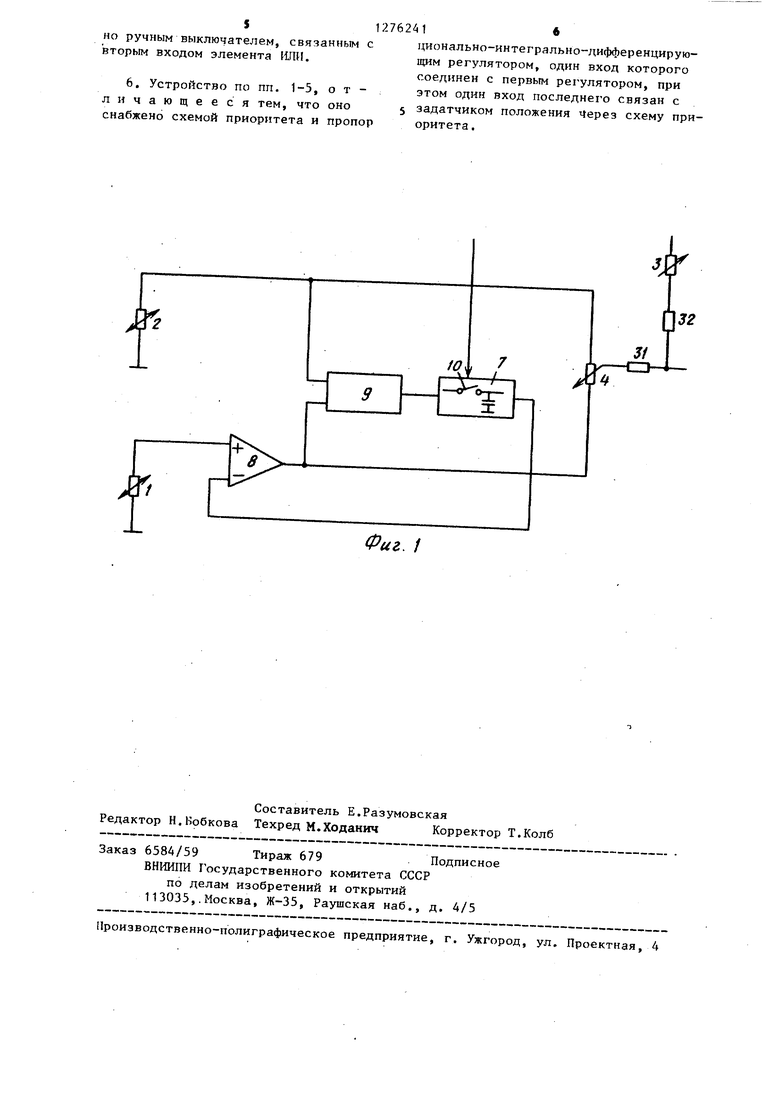
Изобретение относится к автоматизации почвообрабатьгаающих машин. Цель изобретения - исключение нежелательного смещения подъемного механизма. Устройство содержит силовой датчик 1, датчик 2 положения с задатчиком 3 параметра положения, за датчик 4 смешивания, регулятор 5, запоминающий блок 7, дифференциальньй усилитель 8,.регулятор 9, пропорционально интегрально-дифференцирующий (ЦИД) регулятор 16. Если в работу i включен задатчик 3 параметра положения, дифференцирующее звено 26 поСО дает сигнал на ПИД-регулятор 16 при изменении положения рабочего органа. 5 з.п. ф-лы, 2 ил. // см
| Патент США № 4064945, кл | |||
| Печь для непрерывного получения сернистого натрия | 1921 |
|
SU1A1 |
