Изобретение относится к грузозахватным устройствам, предназначенным, преимущественно, для выполнения мон тажных работ.
Целью изобретения является расширение эксплуатационных возможностей устройства.
На фиг. 1 показано устройство, общий вид ; на фиг. 2 - то же, вид сверху; на фиг. 3 - схема соединения силовых дилиндров.
Устройство содержит раму 1 с проушинами 2 для крепления к грузоподъемному механизму и опирающуюся на раму балку 3 с захватными органами 4. Рама выполнена из продольных и поперечных профильных элементов, на которых закреплена плита 5 с отверстием. 6 в средней части. В отверстии 6 размещена закрепленная на балке цапфа 7, снабженная башмаками 8, опирающимися на плиту 5. Привод балки 2 состоит из четырех силовых цилиндров 9-12, одни концы которых шарнирно прикреплены к углам pai-ai, а другие попарно - к кронштейнам 13, установленным на цапфе 7. Для обеспечения равенства рабочих ходов во всех направлениях цилиндры расположены в плане под углом 45° к продольной оси балки. В этом случае отверстие в -пдите 5 может быть лым диаметром Д У, 2s + d, где s - величина рабочего хода из нейтрального положения, d - диаметр цапфы 6, При необходимости иметь разные величины рабочих перемещений в двух на- правлениях цилиндры могут быть установлены под другими углами. При этом отверстие в плите может быть выполнено необходимой формы, обеспе- чивающей свободные перемещения в нем .цапфы.
Нсшример влево (фиг.З), в магист- Одинаковые полости всех цилиндров, 45 раль 20 цилиндров 9 и 10 подводят
давление, а магистраль 20 цилиндров 11 и 12 сообщают со сливом. Распределитель 18 осуществляет подвод рабочего тела, например жидкости, в
50 штоковые полости цилиндров 9 и 10. Из поршневьпх полостей зтих цилиндров жидкость вытесняется по магистралям 21 и 24 через распределитель 27 и 28 магистрали 22 и 25 (магистSS рали 29 и 30 перекрыты), которые посредством распредехштеля 31 соединены с магистралями 23 и 26 соответственно. Из последних жидкость посту
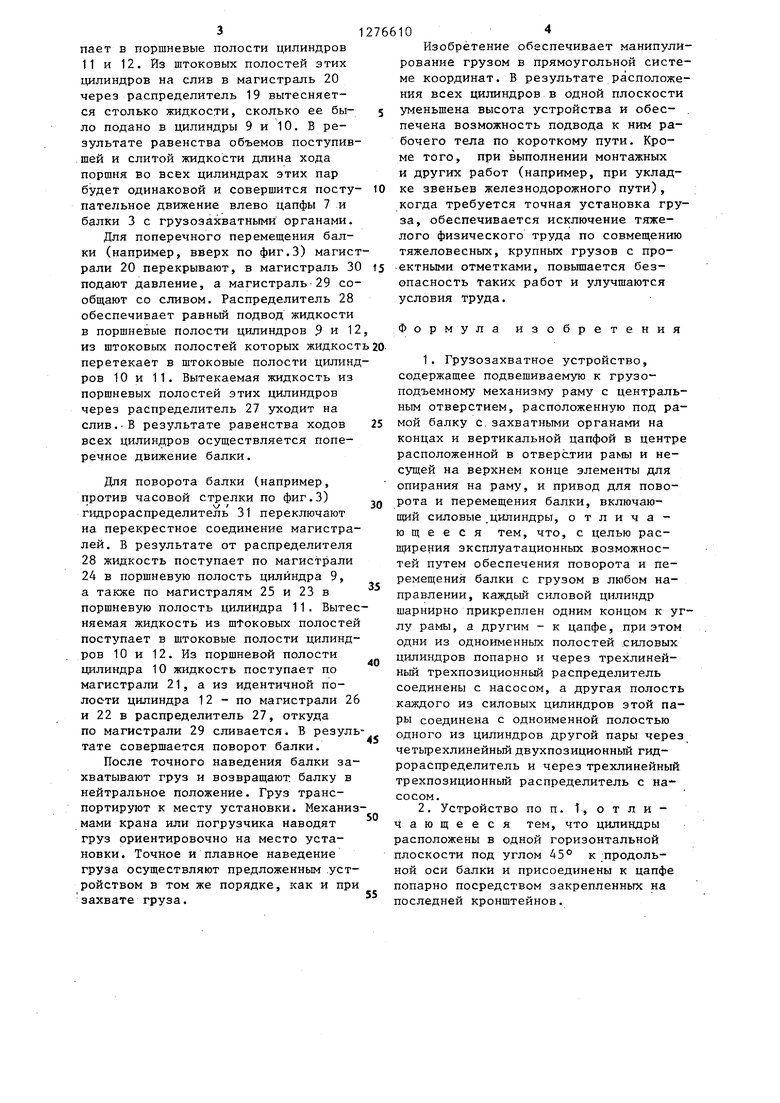
например штоковые, (фиг. 3) связаны попарно магистралями 14, 15 и 16, 17 с трехлинейными трехпозиционныг-ш: распределителями 18 и 19 с соединенными проходами при среднем положении золотника. К распределителям 18 и 19 подведены напорные (сливные) магистрали 20. В результате образованы две пары цилиндров 9, 10 и 11, 12. Эти первые пары цилиндров обеспечивают одно из поступательных перемещений балки, например продольное, относительно рамы.
Противоположные полости всех цилиндров, например порщневые, связаны также попарно магистралями 21, 22, 23 и 24, 25, 26 с дополнительными
логическими элементами И представляющих собой распределители 27 и 28, к которым подведены напорные (сливные) магистрали 29 и 30. В результате образованы две вторые пары цилиндров 9,12 и 10,11, обеспечивающие поступательное перемещение балки в поперечном направлении.
Между магистралями 25, 26 и 22, 23 установлен четырехлинейный двухпозиционный гидрораспределитель 31, обеспечивающий соединение либо магистралей 22 и 25 с магистралями 23 и 26 соответственно либо их перекрестное соединение,
при перекрестном соединении указанных магистралей образуются две .новые пары цилиндров 9, 10 и 10, 12, составленные из противоположных цилиндров. Эти цилиндры обеспечивают поворот балки за счет действия пар сил на плечах, величина которых пропорциональна длине кронштейнов 13 и зависят от угла между осями цилиндров и балки.
В исходном (нейтральном) положении магистрали 20, 29 и 30 перекрыты. Сверху устройство может иметь ограждение 32.
Предложенное устройство работает
следующим образом.
Механизмами грузоподъемной машины устройств с нейтрально установленной балкой 3 наводят ориентировочно на груз. Точное наведение захватных органов 4 осуществляется перемещениями балки в продольном, поперечном направлениях и вращением. Для продольного перемещения балки,
пает в поршневые полости цилиндров 11 и 12. Из штоковых полостей этих цилиндров на слив в магистраль 20 через распределитель 19 вытесняется столько жидкости, сколько ее бы- ло подано в цилиндры 9 и 10. В результате равенства объемов поступившей и слитой жидкости длина хода поршня во всех цилиндрах этих пар будет одинаковой и совершится посту- пательное движение влево цапфы 7 и балки 3 с грузозахватными органами. Для поперечного перемещения балки (например, вверх по фиг.З) магистрали 20 перекрывают, в магистраль 30 подают давление, а магистраль-29 сообщают со сливом. Распределитель 28 обеспечивает равный подвод жидкости в поршневые полости цилиндров и 12 из штоковых полостей которых жидкост перетекает в штоковые полости цилиндров 10 и 11. Вытекаемая жидкость из поршневых полостей этих цилиндров через распределитель 27 уходит на слив.-В результате равенства ходов всех цилиндров осуществляется поперечное движение балки.
Для поворота балки (например, против часовой стрелки по фиг.З) гидрораспределитель 31 переключают на перекрестное соединение магистралей. В результате от распределителя 28 жидкость поступает по магистрали 24 в поршневую полость цилиндра 9, а также по магистралям 25 и 23 в поршневую полость цилиндра 11. Вытесняемая жидкость из шфоковых полостей поступает в штоковые полости цилиндров 10 и 12. Из поршневой полости цилиндра 10 жидкость поступает по магистрали 21, а из идентичной полости цилиндра 12 - по магистрали 26 и 22 в распределитель 27, откуда по магистрали 29 сливается. В результате совершается поворот балки.
После точного наведения балки захватывают груз и возвращают, балку в нейтральное положение. Груз транспортируют к месту установки. Механизмами крана или погрузчика наводят груз ориентировочно на место установки. Точное и плавное наведение груза осуществляют предложенным .устройством в том же порядке, как и при захвате груза.
j 10 ts 20 25
5
0
5
0
5
Изобретение обеспечивает манипулирование грузом в прямоугольной системе координат. В результате расположения всех цилиндров в одной плоскости уменьшена высота устройства и обес- . печена возможность подвода к ним рабочего тела по короткому пути. Кроме того, при выполнении монтажных и других работ (например, при укладке звеньев железнодорожного пути), когда требуется точная установка груза, обеспечивается исключение тяжелого физического труда по совмещению тяжеловесных, крупных грузов с проектными отметками, повьштается безопасность таких работ и улучшаются условия труда.
Формула изобретения
1. Грузозахватное устройство, содержащее подвешиваемую к грузоподъемному механизму раму с центральным отверстием, расположенную под рамой балку с.захватными органами на концах и вертикальной цапфой в центре расположенной в отверстии рамы и несущей на верхнем конце элементы для опирания на раму, и привод для поворота и перемещения балки, включающий силовые цилиндры, отличающееся тем, что, с целью рас- ШJ peния эксплуатационных возможностей путем обеспечения поворота и перемещения балки с грузом в любом направлении, каждый силовой цилиндр шарнирно прикреплен одним концом к углу рамы, а другим - к цапфе, при этом одни из одноименных полостей .силовых цилиндров попарно и через трехлинейный трехпозиционный распределитель соединены с насосом, а другая полость каждого из силовых цилиндров этой пары соединена с одноименной полостью одного из цилиндров другой пары через четырехлинейный двухпозиционный гидрораспределитель и через трехлинейный трехпозиционный распределитель с насосом.
2. Устройство по п. I, о т л и - чающееся тем, что цилиндры расположены в одной горизонтальной плоскости под углом 45° к продольной оси балки и присоединены к цапфе попарно посредством закрепленных на последней кронштейнов.
Ч
фи9.2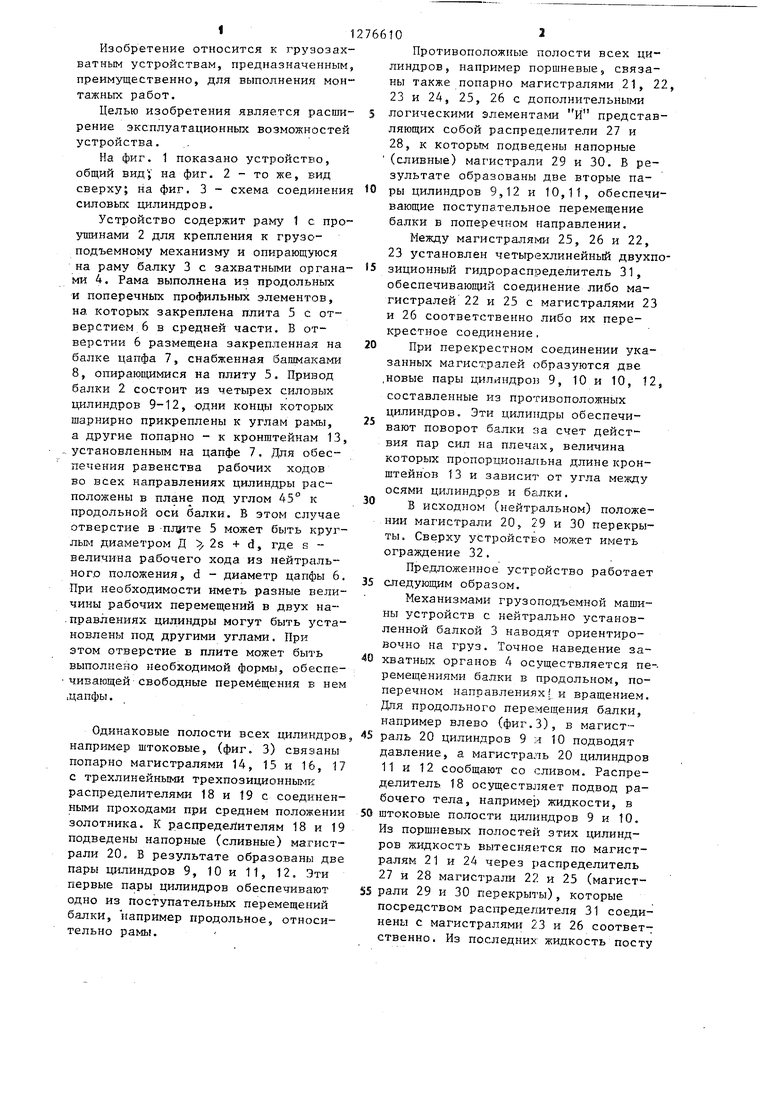
| название | год | авторы | номер документа |
|---|---|---|---|
| НАТЯЖНОЕ УСТРОЙСТВО СКРЕБКОВОГО КОНВЕЙЕРА ПОГРУЗОЧНОЙ МАШИНЫ | 1992 |
|
RU2057695C1 |
| ГОРНОПРОХОДЧЕСКАЯ МАШИНА С ГИДРОМЕХАНИЧЕСКИМ РАБОЧИМ ОРГАНОМ | 1995 |
|
RU2100598C1 |
| Гидравлический привод синхронного и независимого перемещения исполнительных органов грузовой платформы транспортного средства | 1988 |
|
SU1581620A1 |
| ТЯГОВО-ТРАНСПОРТНОЕ СРЕДСТВО | 2002 |
|
RU2232685C1 |
| ГИДРОСИСТЕМА УПРАВЛЕНИЯ ШПАЛОПОДБИВОЧНЫМ РАБОЧИМ ОРГАНОМ | 1996 |
|
RU2088719C1 |
| Механизм подъема кузова транспортного средства | 1990 |
|
SU1789373A1 |
| Устройство управления переключающим органом | 1990 |
|
SU1749602A1 |
| Передаточная тележка | 1987 |
|
SU1518178A1 |
| Портальное транспортное средство | 1980 |
|
SU958163A1 |
| Устройство для перемещения исполнительного органа проходческой машины | 1983 |
|
SU1094960A1 |

Изобретение относится к подъемно-транспортному машиностроению, в частности к грузозахватным устройствам. Целью изобретения является расширение эксплуатационных возможностей путем обеспечения поворота и перемещения в любом направлении. 6 7 32 О Устройство содержит раму 1. На раму 1 опирается балка 3 с захватными органами 4. На раме 1 закреплена плита 5 с отверстием 6 в средней части, в котором размещена закрепленная на балке цапфа 7, опирающаяся на плиту 5. Балка 3 приводится в движение силовыми цилиндрами, прикрепленными одними концами к углам р амы 1, а другими к цапфе 7. Одна из одноименных полостей цилиндров попарно и через трехлинейный трехпозиционный распределитель соединена с насосом, а другая полость каждого из силовых цилиндров этой пары соединена с одноименной полостью одного из цилиндрдв другой пары через четырехлинейный двух- позиционный гидрораспределитель и через трехлинейный трехпозиционный распределитель с насосом, 1 з.п. ф-лы, 3 ил. а S 8 фие4
Редактор А. Гулько
Составитель Ю. Козлов
Техред и.Попович Корректор. Колб
Заказ 6632/18Тираж /99Подписное
ВНИИПИ Государственного комитета СССР
по делам изобретений и открытий 113035, Москва, Ж-35, Раушская наб.,д. 4/5
Производственно-полиграфическое предприятие, г. Ужгород, ул. Проектная, 4
| Авторское свидетельство СССР № 953796, кл, В 66 С 1/68, 1980. |
