to
31581620
Изобретение относится к транспортному машиностроению, а именно к гидроприводу грузовой платформы, используемой пЈи перегрузке груза с одного транспортного средства на другое, с обеспечением точной установки грузаЦель изобретения - повышение надежности и точности синхронизации в расширенном диапазоне скоростей перемещения и поворота грузовой платформы.
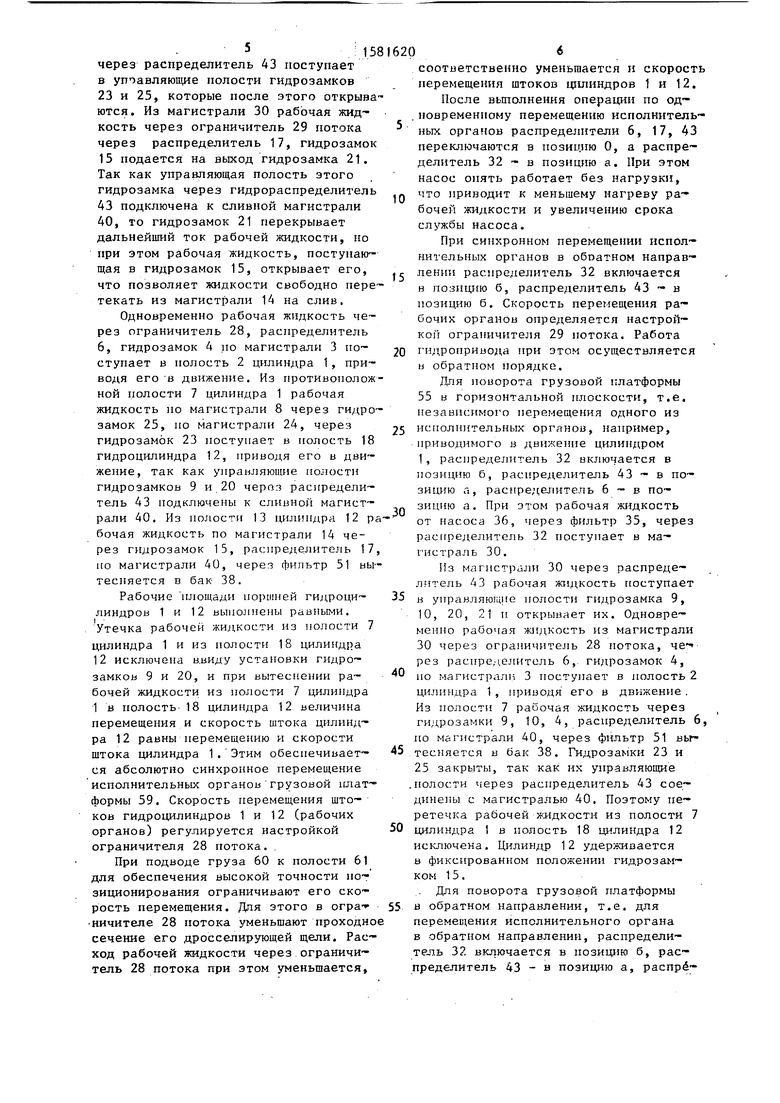
На фиг. 1 представлена функциональная схема гидропривода; на фиг. 2- транспортное средство; на фиг. 3 - узел грузовой платформы, вид в аксонометрии .
Гидропривод грузовой платформы для обеспечения наведения на место груза содержит силовой цилиндр 1 20 (фиг. 1), связанный полостью 2 прямого хода, соединительной магист- ралью 3 прямого хода с выводом двойного гидрозамка 4, соединенного своим входом с рабочей линией 5 первого 25 трехпозиционного четырехлинейного распределителя 6. Полость 7 обратного хода силового цилиндра 1 связана магистралью 8 обратного хода с выходом одинарного гидрозамка 9, связанного своим входом с входом одинарного гидрозамка 10, выход которого связан с вторым выводом гидрозамка 4. Второй вход последнего соединен с рабочей линией 11 распределителя 6.
Силовой цилиндр 12 полостью 13 обратного хода, магистралью 14 связан с выводом двойного гидрозамка 15, соединенного своим входом с рабочей линией 16 второго трехпозиционно- Q го четырехлинейного гидрораспределителя 17. Полость 18 прямого хода цилиндра 12 связана магистралью 19 прямого хода с выходом гидрозамка 20, связанного своим входом с входом гидроэамка 21, соединенного своим выходом с вторым выводом гидрозамка 15, второй вход которого соединен с рабочей линией 22 распределителя 17
Полость 18 цилиндра 12 соединена с выходом одинарного гидрозамка 23, вход которого перепускной магистралью 24 соединен с входом одинарного гидрозамка 25, соединенного своим выходом с полостью 7 цилиндра 1. Распределители 6 и 17 линиями 26 и 27 через ограничители 28 и 29 потока магистралью 30 нагнетания-соединены с линией 31 двухпозиционного трех35
45
50
55
o
0 5
Q
5
5
0
5
линейного распределителя 32, соединенного линией 33, гидролинией 34, через фильтр 35 с насосом 36, соединенным через вентиль ч с баком 38. Линия 39 распределителя 32 сливной магистралью 40 соединена с баком 38, линии 41 и 42 распределителей 6 и 17 - с баком 38.
Дополнительный трехпозиционный четырехлинейный распределитель 43 соединен с управляющими полостями гидрозамков 9, 10, 20, 21, линией 44 - с управляющими полостями гидрозамков 23 и 25, линией 45 - с магистралью 30, а линией 46 - с магистралью 40. Насос 36 через фильтр 35 соединен с предохранительным клапаном 47.
Для контроля давления в линии высокого давления установлен манометр 48, соединенный через вентиль 49, демпфер 50 с линией 33 распределителя 32. Вход фильтра 51 соединен с демпфером 52 через вентиль 53 с манометром 54.
Цилиндры 1 и 12 (фиг. 3) закреплены поперек рамы 55 транспортного средства, установленного на рельсовых направляющих bt. Цилиндры 1 и 12 связаны с раздвижными направляющими элементами 57, на которых закреплены вертикальные шкворни 58, связанные с грузовой платформой 59. На последней установлен груз 60, загружаемый в полость 61 второго транспортного средства 62, стоящего также на рельсовом пути 56.
Гидропривод( работает следующим образом.
При включении электродвигателя насоса 36 распределитель 32 находится в позиции а и вся рабочая жидкость, поступающая от насоса 36 через фильтр 35, распределитель 32, по магистрали 40, через фильтр 51 поступает в бак 38, т.е. пуск насоса осуществляется без нагрузки.
Для перемещения грузовой платформы 59 поперек транспортного средства при синхронном перемещении исполнитель- ных органов в одном направлении распределитель 32 переключают в позицию б, распределители 6 и 17 включает в позицию а, распределитель 43 - в позицию б. При этом рабочая жидкость от насоса 36 через фильтр 35, распределитель 32 поступает в магистраль 30. Из последней рабочая жидкость
515
через распределитель 43 поступает в управляющие полости гидрозамков 23 и 25, которые после этого открыва ются. Из магистрали 30 рабочая жидкость через ограничитель 29 потока через распределитель 17, гидрозамок 15 подается на выход гидрозамка 21. Так как управляющая полость этого гидрозамка через гидрораспределитель 43 подключена к сливной магистрали 40, то гидрозамок 21 перекрывает дальнейший ток рабочей жидкости, но при этом рабочая жидкость, поступающая в гидрозамок 15, открывает его, что позволяет жидкости свободно пере текать из магистрали 14 на слив.
Одновременно рабочая жидкость через ограничитель 28, распределитель 6, гидрозамок 4 но магистрали 3 поступает в полость 2 цилиндра 1, приводя его в движение. Из противоположной полости 7 цилиндра 1 рабочая жидкость но магистрали 8 через гидро- замок 25, по магистрали 24, через гидрозамок 23 поступает в полость 18 гидроцилиндра 12, приводя его в движение, так как управляющие полости гидрозамков 9 и 20 черт распределитель 43 подключены к сливной магистрали 40. Из полости 13 цилиндра 12 ра бочая жидкость по магистрали 14 через гидрозамок 15, распределитель 17 но магистрали 40, через фильтр 51 вытесняется в бак 38.
Рабочие площади поршней гидроцилиндров 1 и 12 выполнены равными, утечка рабочей жидкости из полости 7 цилиндра 1 и из полости 18 цилиндра 12 исключена ввиду установки гидрозамков 9 и 20, и при вытеснении рабочей жидкости из полости 7 цилиндра 1 в полость 18 цилиндра 12 величина перемещения и скорость штока цилиндра 12 равны перемещению и скорости штока цилиндра 1. Этим обеспечивается абсолютно синхронное перемещение исполнительных органов грузовой платформы 59. Скорость перемещения штоков гидроцилиндров 1 и 12 (рабочих органов) регулируется настройкой ограничителя 28 потока.
При подводе груза 60 к полости 61 для обеспечения высокой точности позиционирования ограничивают его скорость перемещения. Для этого в огра ничителе 28 потока уменьшают проходно сечение его дросселирующей щели. Расход рабочей жидкости через ограничитель 28 потока при этом уменьшается,
620«
соответственно уменьшается и скорость перемещения штоков цилиндров 1 и 12. После выполнения операции по од- . повременному перемещению исполнительных органов распределители 6, 17, 43 переключаются в позицию 0, а распределитель 32 - в позицию а. При этом насос опять работает без нагрузки,
JQ что приводит к меньшему нагреву рабочей жидкости и увеличению срока службы насоса.
При синхронном перемещении исполнительных органов в обпатном направJ5 лении распределитель 32 включается в позицию б, распределитель 43 - в позицию б. Скорость перемещения рабочих органов определяется настрой- кон ограничителя 29 потока. Работа
20 гидропривода при этом осуществляется в обратном порядке.
Для поворота грузовой платформы 55 в горизонтальной плоскости, т.е. независимого перемещения одного из
25 исполнительных органов, например, приводимого в движение цилиндром 1, распределитель 32 включается в позицию б, распределитель 43 - в позицию а, распределитель 6 - в позицию а. При этом рабочая жидкость от насоса 36, через фильтр 35, через распределитель 32 поступает в магистраль 30.
Из магистрали 30 через распреде- лчтель 43 рабочая жидкость поступает
35 в управляющие полости гидрозамка 9, 10, 20, 21 и открывает их. Одновременно рабочая жидкость из магистрали 30 через ограничитель 28 потока, че рез распределитель 6, гидрозамок 4,
4 по магистрали 3 поступает в полость 2 цилиндра 1, приводя его в движение. Из полости 7 рабочая жидкость через гидрозамки 9, 10, 4, распределитель 6,
по магистрали 40, через фильтр 51 вы- 45 тесняется в бак 38. Гидрозамки 23 и 25 закрыты, так как их управляющие .полости через распределитель 43 соединены с магистралью 40. Поэтому ие- ретечка рабочей жидкости из полости 7 50 цилиндра 1 в полость 18 цилиндра 12 исключена. Цилиндр 12 удерживается в фиксированном положении гидрозам- ком 15.
Для поворота грузовой платформы 5 в обратном направлении, т.е. для перемещения исполнительного органа в обратном направлении, распределитель 32 включается в позицию б, распределитель 43 - в позицию а, распрё30
делитель 6 - в позицию б, Работа гидропривода при этом осуществляется в обратном порядке. Скорость перемещения рабочего органа в обоих случаях определяется настройкой ограничителя 28 потока.
При независимом перемещении второго исполнительного органа, приводимого в движение цилиндром 12, работа гидропривода осуществляется аналогичным образом. При этом распределитель 32 включается в позицию б, распределитель 43 ™ в позицию а, распределитель 17 при подаче рабочей жидкости в тюлость 18 - в позицию а и в позицию б - при подаче рабочей жидкости в полость 13 цилиндра 12. Скорость перемещения штока цилиндра 12 в этом случае определяется настрой кой ограничителя 29 потока. Цилиндр 1 удерживается в фиксированном положении гидрозамком 4.
Формула изобретен-ия
1. Гидравлический привод синхронного и независимого перемещения исполнительных органов грузовой платформы транспортного средства, содержащий два силовых цилиндра двустороннего действия с поршнями и штоками и два трехпозиционных четырехлинейных реверсирующих распределителя, каждый из которых выполнен с напорной, сливной и двумя рабочими линиями, соединенными соответственно с магистралью нагнетания, подключенной к источнику давления, со сливной магистралью и с соединительными магистралями прямого и обратного хода, сообщенными с полостями прямого и обратного хода, силовых цилиндров, причем каждый распределитель выполнен с перекрытой в нейтральной позиции напорной линией, отличающийся тем, что, с целью повышения надежности и
г)
0
5
точности синхронизации в расширенном диапазоне скоростей перемещения и поворота грузовой платформы, он снабжен перепускной магистралью, сообщаю- щей полость обратного хода первого силового цилиндра с полостью прямого хода второго силового цилиндра, одинарными и двойными гидрозамками и идентичным первым двум третьим распределителем, при этом в нейтральной позиции рабочие и сливная линия каждого распределителя сообщены между собой, соединительные магистрали прямого и обратного хода подключены к рабочим распределителям через двойные гид- розамки, в соединительной магистрали обратного хода первого силового цилиндра и соединительной магистрали прямого хода второго силового цилиндра установлено по паре одинарных гидрозамков, отделяющих соответствующие полости силовых цилиндров от соответствующих двойных гидрозамков и подключенных управляющими входами к одной рабочей линии третьего распределителя, в перепускной магистрали установлены два гидрозамка, прерывающих сообщенные между соответствующими полостями силовых цилиндров и подключенных управляющими входами к другой рабочей линии третьего распределителя, а каждый силовой цилиндр выполнен с двумя направленными в противоположные стороны штоками.
2.Привод но п. 1, о т л и ч а ю- щ и и с я тем, что он снабжен ограничителями потока, установленными на входах напорных линий первого и второго распределителей.
3.Привод по п. 1, отличающийся тем, что он снабжен двух- позиционным трехлинейным распределителем для избирательного подключения магистрали нагнетания к источнику давления или одновременно к сливной магистрали.
59
1581620
62
56
55
Фиг.2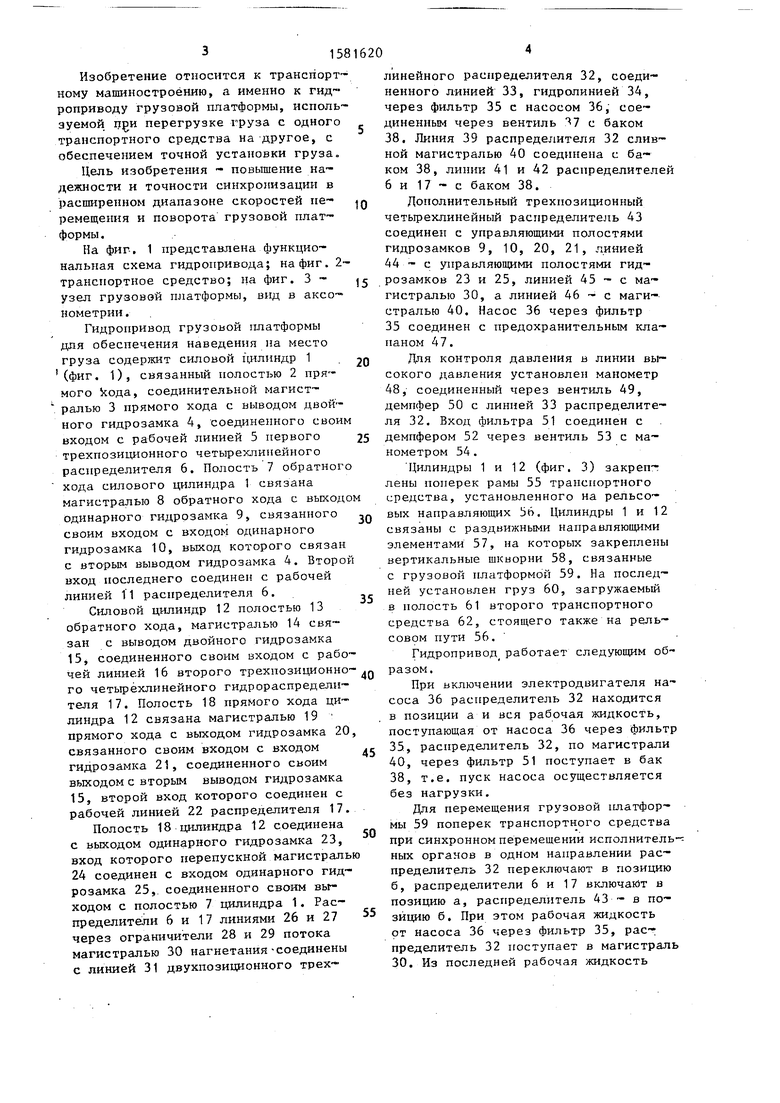
Изобретение относится к перегрузочным системам в транспортном машиностроении. Цель изобретения - повышение надежности и точности синхронизации в расширенном диапазоне скоростей, перемещения и поворота грузовой платформы. Гидропривод содержит силовые цилиндры 1 и 12, связанные магистралями 3, 8, 19 и 14 с распределителями 6 и 17, соединенными магистралью 30 нагнетания с насосом 36 и магистралью 40 слива с баком 38. Гидропривод снабжен перепускной магистралью 24, размещенной между двумя противоположными полостями цилиндров 1 и 12, выполненных с двусторонними штоками, системой одинарных гидрозамков 9, 10, 20, 21, 23 и 25, попарно установленных в магистралях 8 и 19 и соединенных управляющими полостями между собой. Два гидрозамка 23 и 25 установлены в магистрали 24 и соединены управляющими полостями между собой. Распределитель 43 соединен первой линией с управляющими полостями гидрозамков 9, 10, 20 и 21, второй линией - с управляющими полостями гидрозамков 23 и 25, третьей линией - с магистралью 40, а четвертой линией - с магистралью 30. Между полостями цилиндров 1 и 12 и распределителями 6 и 17 установлены двойные гидрозамки 4 и 15. 2 з.п.ф-лы, 3 ил.
S3
Составитель С.Макаров Редактор И.Касарда Техред А.Кравчук Корректор С.Черни
Заказ 2061
Тираж 471
ВНИИПИ Государственного комитета по изобретениям и открытиям при ГКНТ СССР 113035., Москва, Ж-35, Раушская наб., д. 4/5
55
Фиг.З
Подписное
| Захват к погрузчику | 1985 |
|
SU1279945A1 |
| Приспособление для соединения пучка кисти с трубкою или втулкою, служащей для прикрепления ручки | 1915 |
|
SU66A1 |
