1127
Изобретение относится к вычислительной технике и может быть применено в автоматизированных системах управления для отбора информации от удаленных групп двухпозиционных датчиков .
Цель изобретения - повьшение надежности устройства за счет контроля и увеличения дальности связи.
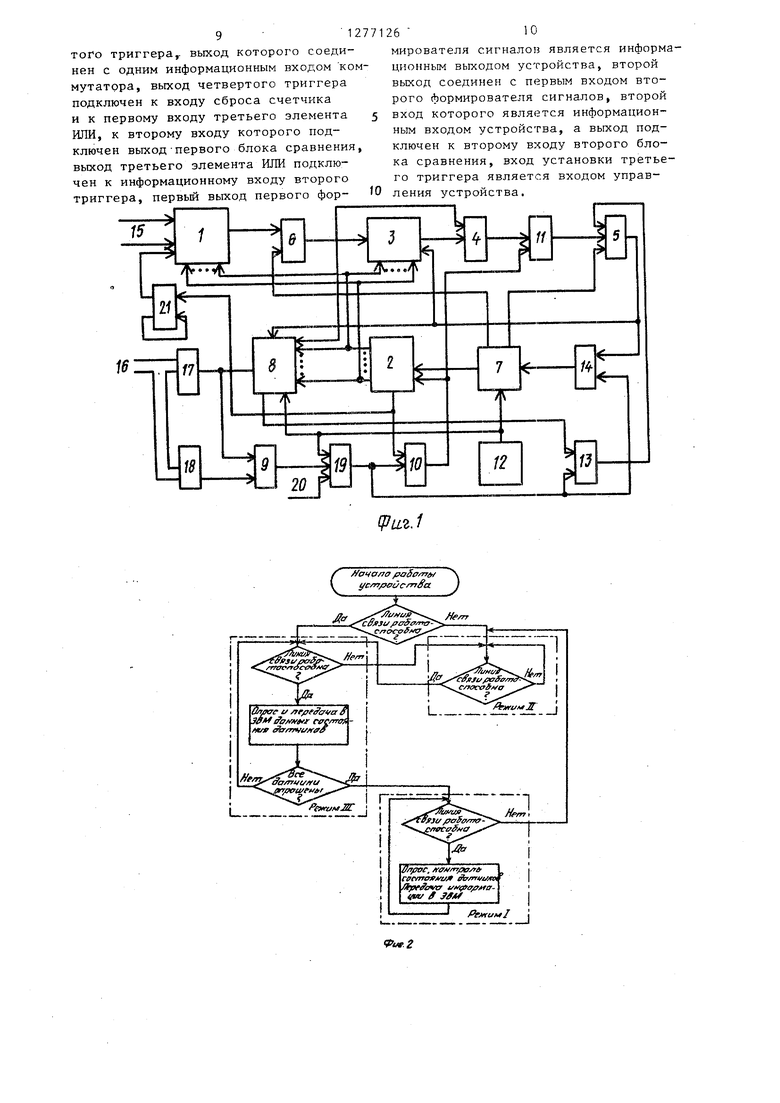
На фиг. 1 представлена блок-схема устройства, на фиг, 2 - алгоритм работы устройства; на фиг. 3-6 - временные диаграммы работы устройства.
Устройство содержит коммутатор 1, счетчик 2, блок 3 памяти, первый блок 4 сравнения, второй триггер 5, первый триггер 6, синхронизатор 7, формирователь 8 кода, второй блок 9 сравнения, четвертьш триггер 10, третий элемент ИЛИ 11, генератор 12 так- товых импульсов, первый и второй элементы ИЛИ 13 и 14, входы 15 данных, линия 16 связи, первый и второй формирователи 17 и 18 сигналов, третий триггер 19, вход 20 запуска устройства, пятый триггер 21.
Связь между устройством и ЭВМ организуется в последовательном коде по интерфейсу токовой петли, Си:гналу VCTon соответствует токовая- посып-
ка, сигналу Старт - бестоковая.
Со стороны ЭВМ линия 16 связи подключается к стандартному устройству
последовательного обмена, обладающему возможностью контролировать параметры входного сигнала таким образом, что при отсутствии тока в линии 16 связи в течение времени, превышающего длительность информационной посылки, вырабатывается специальный сигнал, поступающий в ЭВМ,
Для организации линии 16 связи могут использоваться физические линии, выполненные в виде витой пары, или пары симметричного телефонного кабеля. Питание линии связи осуществляется со стороны ЭВМ.
Устройство предназначено для работы в системах сбора и обработки информации с удаленных (до нескольких километров) групп двухпозиционных датчиков. Наличие большого количества распределенных групп двухпозиционных датчиков характерно, в частности.
50
Формирователи 17 и 18 предназначены для согласования устройства с линией 16 связи. Формирователи 17 и 18 имеют гальваническую развязку и состоят из оптрона и транзисторного ключа. При отсутствии питания устрой- для территориально распределенного ства ключ формирователя 17 разомкнут, технологического оборудования городс- Формирователи 17 и 18 являются пере- ких телефонных сетей, датчиком и приемником информациейУстройство обла,дает повышенной насоответственно,дежностью функционирования вследствие
o
5
Формирователь 8 кода предназначен для формирования информадионного слова, передаваемого в линию 16 связи. На вторые информационные входы фор5 мирователя 8 поступает адрес контролируемого датчика, а на первьй информационный вход - его текущее состояние. На управляющий вход формирователя 8 подается сигнал, разрешающий или запрещающий работу шифратора 8. При поступлении на управляющий вход запрещающего сигнала на первом выходе формирователя 8 появляется сигнал уровня стоповой посьтки. На тактовьш вход формирователя 8 от генератора 12 тактовых импульсов поступает последовательность тактовых импульсов, с помощью которых формирователь 8 преобразует поступающую на его информационные входы информацию из параллельного кода в последовательный, дофор- мировывает стартовый, стоповьй и контрольный биты и -по задним фронтам тактовых импульсов выдает биты сформированной последовательной кодовой комбинации со своего первого выхода в формирователь (передатчик) 17 и на первый вход второго блока 9 сравнения. Со второго выхода формирователя 8 на второй вход первого элемента ИЛИ 13 поступает импульсный сигнал, свидетельствующий о том, что формирователь 8 закончил передачу в . формирователь 17 информационного сло35 на,
Пятьй тригг ер 21 является контрольным датчиком. Он изменяет свое состояние на противоположное в каждом Jдиклe опроса датчиков, и информация Ъ каждом изменении передается в ЭВМ.
Второй блок 9 сравнения предназначен для контроля рабочих параметров линии 16 связи.
4 Блоки 1-14, 19, 21 выполнены на . микросхемах средней степени интеграции серии 155 или аналогичных.
Устройство предназначено для работы в системах сбора и обработки информации с удаленных (до нескольких километров) групп двухпозиционных датчиков. Наличие большого количества распределенных групп двухпозиционных датчиков характерно, в частности.
30
50
для территориально распределенного технологического оборудования городс- ких телефонных сетей, Устройство обла,дает повышенной на3
аппаратного контроля рабочих параметров линии 16 связи со стороны устройства, аппаратного контроля рабочих параметров линии 16 связи и готовности устройства со стороны ЭВМ; про- граммного контроля работоспособности устройства со стороны ЭВМ на основе данных о состоянии контрольного датчка; повторной идентификации состояния всех датчиков по запросу от ЭВМ,
Устройство работает в трех режима режим 1 опроса контролируемых двух- позиционных датчиков и передачи в ЭВМ информации о датчике, изменившем свое состояние, режим II ожидания, режим III передачи в ЭВМ данных о текущем состоянии всех датчиков.
Основным рабочим режимом является режим 1. Передача в ЭВМ информации только о датчиках, изменивших свое состояние, позволяет экономить машинное время, необходимое для решения других задач.
В режим ожидания (режим II) устройство переходит автоматически при отклонении параметров линии 16 связи от требуемых значений.
Функционирование устройства в режиме III происходит в начале работы устройства при восстановлении рабо- чих параметров.линии 16 связи или при запросе ЭВМ информации о текущем состоян1 и всех датчиков.
Кроме того, ЭВМ может перевести устройство в режим III с целью конт- роля работоспособности устройства или восстановления информации о текущем состоянии всех датчиков в случае потери последней из-за неисправности ЭВМ.
Механизм программного перевода устройства в режим III состоит в следующем: ЭВМ кратковременно имитирует неработоспособность линии 16 связи путем прекращения подачи тока в ли- нию.
Устройство работает следующим образом.
Режим I. В основном режиме работы устройство работает по следующему алгоритму: считывание состояния контролируемых датчиков; контроль изменения состояния датчиков; передача информации об изменении состояния контролируемых датчиков в ЭВМ.
В режиме считывания состояния контролируемых двухпозиционных датчиков генератор 12 тактовых импуль
5 О
: 5
20
25
30
0
5
0
5
1264
сов вырабатывает последовательность тактовых импульсов (меандр), поступающую в формирователь 8, синхронизатор 7, четвертьй триггер 19.
Если на вход запрета синхронизатора 7 не поступает запрещайщий сигнал, то по переднему фронту kaж- дого тактового импульса формируются последовательно три управляющих сигнала. С первого выхода синхронизатора 7 на первый вход счетчика 2 поступает первый импульс, увеличивающий содержимое счетчика на единицу. На первом выходе счетчика 2 появляется кодовая комбинация, определяющая текущий адрес контролируемого датчика, которая поступает на информационньй вход формирователя 8, адресные входы коммутатора 1 и блока 3 памяти. Результат опроса выбранного входа коммутатора 1 поступает на информационньй вход первого триггера 6.
По коду счетчика 2, соответствующему адресу заданного входа 15, на выходе блока 3 памяти устанавливается сигнал состояния выбранного датчика, записанньй в предьщущем цикле опроса.
По второму управляющему сигналу с второго выхода синхронизатора 7 производится запись информации о состоянии опрошенного датчика в первьй триггер 6, после чего в первом блоке 4 сравнения происходит сравнение состояния этого датчика с его состоянием в предыдущем цикле опроса, записанным в блок 3 памяти.
Если контролируемьй датчик изменил свое состояние, то на выходе первого блока 4 сравнения появляется сигйал, который через третий элемент ИЛИ 11 подается на информационньй вход второго триггера 5 и (при отсутствии активного сигнала на входе сброса второго триггера 5) по третьему управляющему сигналу (с третьего выхода синхронизатора 7) взводит второй триггер 5.
Сигнал с выхода второго триггера 5, поступающий через второй элемент ИЛИ 14, запрещает работу синхронизатора 7. Поступив на вход разрешения записи блока 3, сигнал с выхода второго триггера 5 разрешает запись информации о текущем состоянии датчика в блок 3. Кроме того, этот сигнал разрешает работу формирователя 8,
В формирователе 8 по задним фронтам тактовых импульсов, поступающих от генератора 12 тактовых импульсов, производится преобразование поступаю- Ш;ИХ на информационные входы сигналов, 5 соответствующих адресу и состоянию контролируемого датчика, в последовательную кодовую комбинацию, дополненную контрольными, стартовыми и
1277126 -6
дине битов передаваемой в линию 16 связи информации.
Сигналы с выхода формирователя 18 и первого выхода формирователя 8 поступают на входы второго блока 9 сравнения. Результат сравнения по переднему фронту тактового импульса записывается в четвертый триггер 19. Если в момент поступления переднего
стоповыми битами, поступающую с пер- fO фронта тактового импульса сигналы на
вого выхода формирователя 8 на вход формирователя 17 и с его выхода - в линию 16 СВЯЗИ; По окончаний передачи кодовой комбинации с второго выхода формирователя 8 через первьй элемент ИЛИ 13 на вход сброса второго триггера 5 подается активньй сигнал, сбрасывающий второй триггер 5, останавливающий работу формирователя 8 и (при отсутствии активного сигнала на первом входе второго элемента ИЖ-14) разрешающий работу синхрони- затора. Устройство переходит к опросу состояния следующего датчика.
входах второго блока 9 сравнения сов- Ьадают, то на выходе четвертого триц- гера 19 появляется пассивньш сигнал, не оказывающий влияния на работу устf5 ройства. При несовпадении сигналов на входах второго блока сравнения в момент прихода переднего фронта тактового импульса на выходе третьего триггера 19 появляется активный сиг20 нал, по которому взводится четвертый триггер 10. В момент появления высокого (активного) уровня на выходе четвертого триггера 10 происходит обнуление счетчика 2, подключенного
Если же текущее состояние контро- 25 вторьм входом к выходу четвертого лируемого датчика совпадает с его сое- триггера 10. Второй вход счетчика тоянием в предыдущем цикле опроса, то 1 является фронтовым, и обнуление то при отсутствии активных сигналов на втором входе третьего элемента
счетчика происходит только при по лении на втором входе счетчика 2 п
ИЛИ 11 и первом входе второго элемен- 30 ложительного перепада уровня. Активта ИЛИ 14 выдача информации в линию 16 связи не производится и начинается опрос состояния следующего датчика. После опроса всех датчиков счетчик 2 обнуляется и вьфабатывает сигнал переноса, изменяющий состояние пятого триггера 21, подключенного прямым вькодом к последнему информационному входу коммутатора 1. Таким образом, в каждом цикле опроса проис- ходит изменение состояния контрольного датчика и производится передача информации об изменении состояния последнего датчика в линию 16 связи, после чего устройство переходит к но- ному циклу опроса и передачи данных об изменении состояния датчиков.
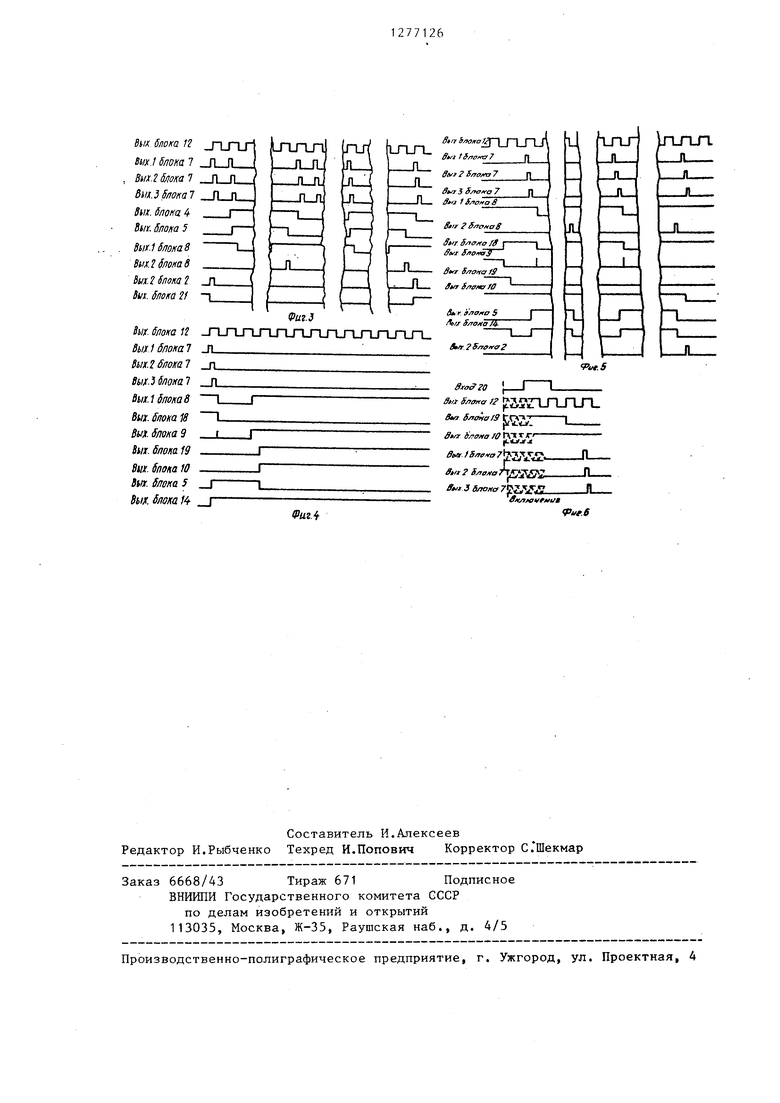
Временная диаграмма работы устройства в режиме 1 приведена на фиг. 3.
Режим II (режим ожидания).
Устройство по каждому тактовому импульсу осуществляет контроль рабочих параметров линии 16 связи путем проверки соответствия сигнала в линии 16 связи сигналу на выходе формирователя 8, Проверка соответствия сигналов производится по передним фронтам импульсов тактовой последовательности, что соответствует сере
входах второго блока 9 сравнения сов- Ьадают, то на выходе четвертого триц- гера 19 появляется пассивньш сигнал, не оказывающий влияния на работу устройства. При несовпадении сигналов на входах второго блока сравнения в момент прихода переднего фронта тактового импульса на выходе третьего триггера 19 появляется активный сигнал, по которому взводится четвертый триггер 10. В момент появления высокого (активного) уровня на выходе четвертого триггера 10 происходит обнуление счетчика 2, подключенного
вторьм входом к выходу четвертого триггера 10. Второй вход счетчика 1 является фронтовым, и обнуление
счетчика происходит только при появлении на втором входе счетчика 2 по05
ным сигналом, появившимся на выходе третьего триггера 19, через первый элемент ИЛИ 13 сбрасывается второй триггер 5 и через второй элемент ИЛИ r 14 останавливается синхронизатор 7. Устройство переходит в режим ожидания и находится в данном режиме до восстановления рабочих параметров линии 16 связи.
Временная диаграмма работы устройства в режиме II приведена на фиг.4.
Режим III (режим передачи в ЭВМ данных о текущем состоянии всех датчиков) .
При восстановлении рабочих параметров линии 16 связи на выходе второго блока 9 сравнения появляется пассивный сигнал, записьгеаемый по
Q переднему фронту тактового импульса в четвертый триггер 19 и далее поступающий через второй элемент ИЛИ 14 на вход запрета синхронизатора 7 и разрешающий его работу.
Начинается работа устройства аналогично работе в режиме 1, за исключением того, что независимо от результата сравнения состояний датчика, поступивших с одного из входов
712771
устройства 15 и выхода блока 3, в линию связи 16 вьдается информация с текущем состоянии датчика и производится запись текущего состояния датчика в блок 3.5
Осуществление выдачи информации в ЭВМ происходит потому, что четвер- тьш триггер 10 находится во взведенном состоянии и активный сигнал с
его выхода, поступая через третий эле мент ИЛИ 11, имитирует на входе вто- рог о триггера 5. несравнение состояния датчиков.
При окончании опроса всех датчиков счетчик 2, который в момент уста- новления режима III бьш сброшен, вновь переходит в исходное (нулевое) состояние. При на втором выходе счетчика 2 появляется сигнал переноса, сбрасывающий четвертый триггер , Ю, в результате чего снимается активный сигнал на втором входе третьего элемента ИЛИ 11 и устройство переходит в основной рабочий режим 1.
Устройство переходит также в режим III после включения или восстановления питания. При этом на вход 20 запуска устройства подается из блока питания импульс, взводящий тре- тий триггер 19 и через него четвертьй триггер 10. По переднему фронту тактового импульса третий триггер 19 сбрасывается, разрешая работу синхронизатора 7, а четвертый триггер 10 остается в.о взведенном состоянии, имитируя через третий элемент ИЛИ 11 изменение состояния датчиков. Происходит передача в линию 16 связи данных о состоянии всех датчиков.
Временные диаграммы работы устройства в режиме III и при включении питании приведены на фиг. 5 и 6 соответственно.
Использование изобретения позво- ляет контролировать- более удален- ные группы дискретных датчиковj исключить затраты машинного времени на управление опросом датчиков; применять только одну физическую линию вместо шестнадцати для связи устройства сопряжения с ЭВМ.
Таким образом, устройство характеризуется повышенной надежностью.
Формула изобретения
Устройство для сопряжения электронной вычислительной машины с дис26 8
кратными датчиками, содержащее два триггера, блок памяти, первый блок сравнения, счр., синхронизатор и коммутатор, информационные входы которого являются соответствующими входами данных устройства, а адресные входы объединены с адресными входами блока памяти и соединены с выходом данных счетчика, подключенного счетным входом к первому выходу синхронизатора, второй выход которого соединен с синхровходом первого триггера, выход которого подключен к первому входу первого блока сравнения и к информационному входу блока fla- мяти, второй вход первого блока сравнения соединен с выходом блока памяти, третий выход блока синхронизации подключен к синхровходу второго триггера, выход коммутатора подключен к информационному входу первого триггера, отл ичающее- с я тем, что, с целью повышения надежности устройства за счет контроля и увеличения дальности связи, в него введены формирователь кода, второй блок сравнения, три триггера, три элемента ИЛИ, генератор тактовых импульсов, два формирователя сигна лов, выход первого триггера соединен с одним информационным входом форми- рователя кода, другие информационные входы которого соединены с выходом данных счетчика, первый выход формирователя кода соединен с входом первого формирователя сигналов и первым входом второго блока сравнения, выход которого подключен к информационному входу третьего триггера, выход которого подключен к входу установки четвертого триггера и к первым входам первого и второго элементов ИЛИ, второй вход первого-элемента ИЛИ подключен к второму выходу формирователя кода, выход - к входу сброса второго триггера, выход которого подключен к второму входу второго элемента ИЛИ, входу разрешения записи блока памяти и управляющему входу формирователя кода, выход второго элемента ИЛИ подключен к входу запрета синхронизатора, выход генератора тактовых импульсов подключен к тактовым входам синхронизатора, формирователя кода и синхровходу третьего триггера, выход переполнения счетчика подключен к входу сброса четвертого триггера и счетному входу пя9 12771 того триггера выход которого соединен с одним информационным входом коммутатора, выход четвертого триггера подключен к входу сброса счетчика и к первому входу третьего элемента 5 ИЛИ, к второму входу которого подключен выход-первого блока сравнения, выход третьего элемента ИЛИ подключен к информационному входу второго триггера, первьй выход первого форfO
26 -10
мирователя сигналов является информационным выходом устройства, второй выход соединен с первым входом второго формирователя сигналов, второй вход которого является информационным входом устройства, а выход подключен к второму входу второго блока сравнения, вход установки третьего триггера является входом управления устройства.
(Ри.г.1
| название | год | авторы | номер документа |
|---|---|---|---|
| Устройство телесигнализации | 1983 |
|
SU1149297A1 |
| Система телемеханики | 1984 |
|
SU1257686A1 |
| Автоматизированная система контроля радиоэлектронных устройств | 1989 |
|
SU1683038A1 |
| Устройство для сопряжения электронной вычислительной машины с дискретными датчиками | 1982 |
|
SU1084774A1 |
| Система телемеханики | 1990 |
|
SU1711216A1 |
| Устройство для сопряжения вычислительной машины с датчиками | 1988 |
|
SU1605245A1 |
| Устройство для ввода информации | 1988 |
|
SU1522190A1 |
| Система для обмена информацией | 1980 |
|
SU980087A1 |
| Устройство стабилизации амплитуды видеосигнала | 1989 |
|
SU1748283A1 |
| УСТРОЙСТВО ДЛЯ ПЕРЕДАЧИ ИНФОРМАЦИИ В АДАПТИВНЫХ ТЕЛЕМЕТРИЧЕСКИХ СИСТЕМАХ | 1995 |
|
RU2103745C1 |
Изобретение относится к автоматике и вычислительной технике и может быть использовано для сбора информации от удаленных групп дискрет- ньпс датчиков. Цель изобретения - по- вьшение надежности устройства за счет контроля и увеличения дальности связи, достигается введением в устройство формирователя кода, второго блока сравнения, трех триггеров, трех элементов ИЛИ, генератора тактовых сигналов и двух формирователей сигналов с их связями. Введение перечисленных блоков позволяет снизить число информационных связей и увеличить дальность связи. 6 ил.
(тачало foSp/rr А yc/npoacfjfa )
Slftfferc V /reflffoifo f. 3ff tfafmtff cvemoA, fffff
fUlOf l /rrVt/M-fft
/Ул
I
I
.
Wftpoc, ffaMfrTflo A fpnmnfMUJt Ar/Tvam Apfffavtr vififir/ffta- «Kf f JwT
Т
Pe/xuHiI
l
Фиг.З JTJTJTJTJ4JTJlJTjaJTJT nJ-L.
Л .
Vuz. t
8nt ijv/raX I J f
Л-Л-П л
Sf/i Saarfa Z
n/f.S
w Атдто // pi ZT-TLrLrL
вя/tMtvrHUt
Puf.6
Составитель И.Алексеев Редактор И.Рыбченко Техред И.Попович Корректор СГШекмар
Заказ 6668/43 Тираж 671 Подписное ВНИИПИ Государственного комитета СССР
по делам изобретений и открытий 113035, Москва, Ж-35, Раушская наб., д. 4/5
Производственно
-полиграфическое предприятие, г. Ужгород, ул. Проектная, 4
| Устройство для сопряжения | 1979 |
|
SU842775A1 |
| Приспособление для точного наложения листов бумаги при снятии оттисков | 1922 |
|
SU6A1 |
| Устройство для вывода информации | 1983 |
|
SU1124279A1 |
| Приспособление для точного наложения листов бумаги при снятии оттисков | 1922 |
|
SU6A1 |
