Изобретение относится к устройствам для передачи энергии между подвижными и неподвижными -объектаьш с с помощью гибких кабелей и шлангов и может быть использовано в промышленном транспорте и различных областях машиностроения.
Цель изобретения - уменьшение габаритов и материалоемкости устройства при увеличении хода подвижного объекта и одновременное повьш1ение технологичности изготовления устройства.
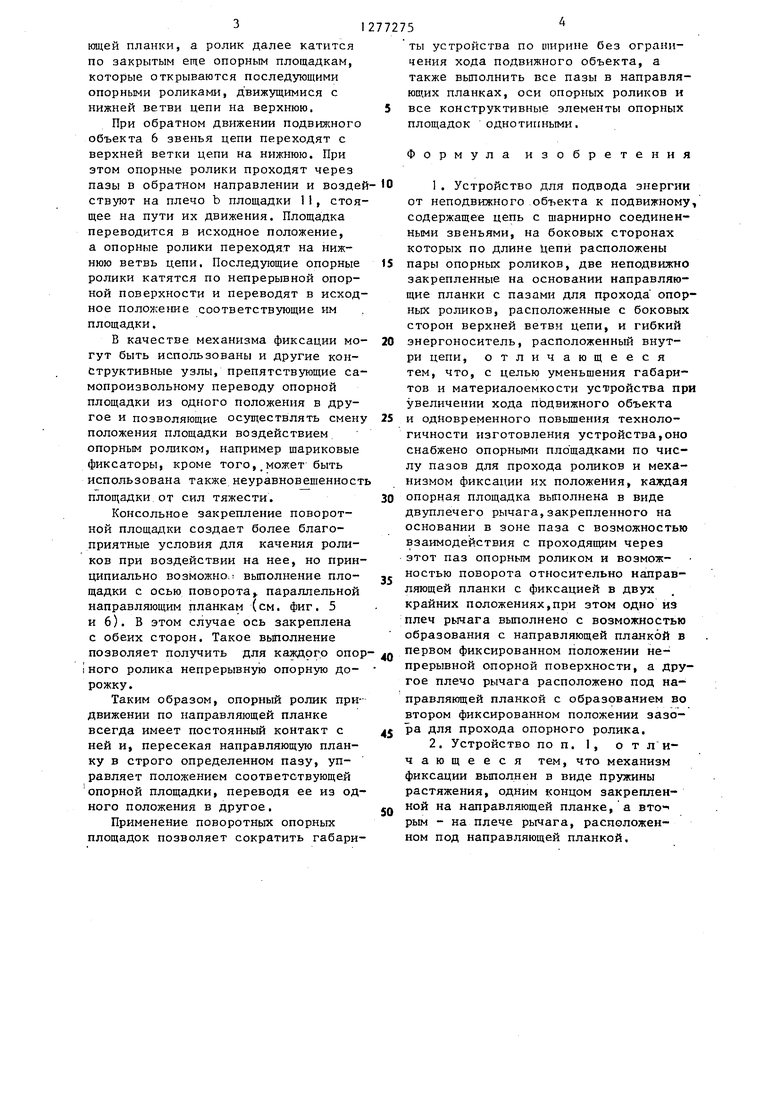
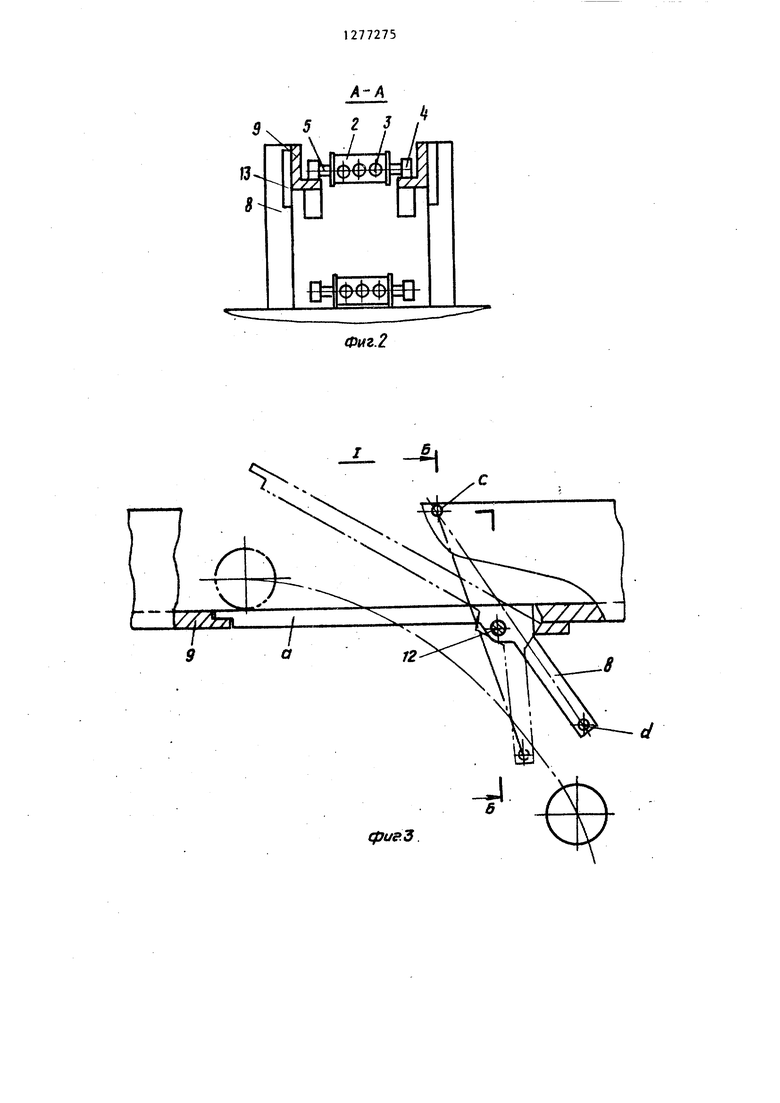
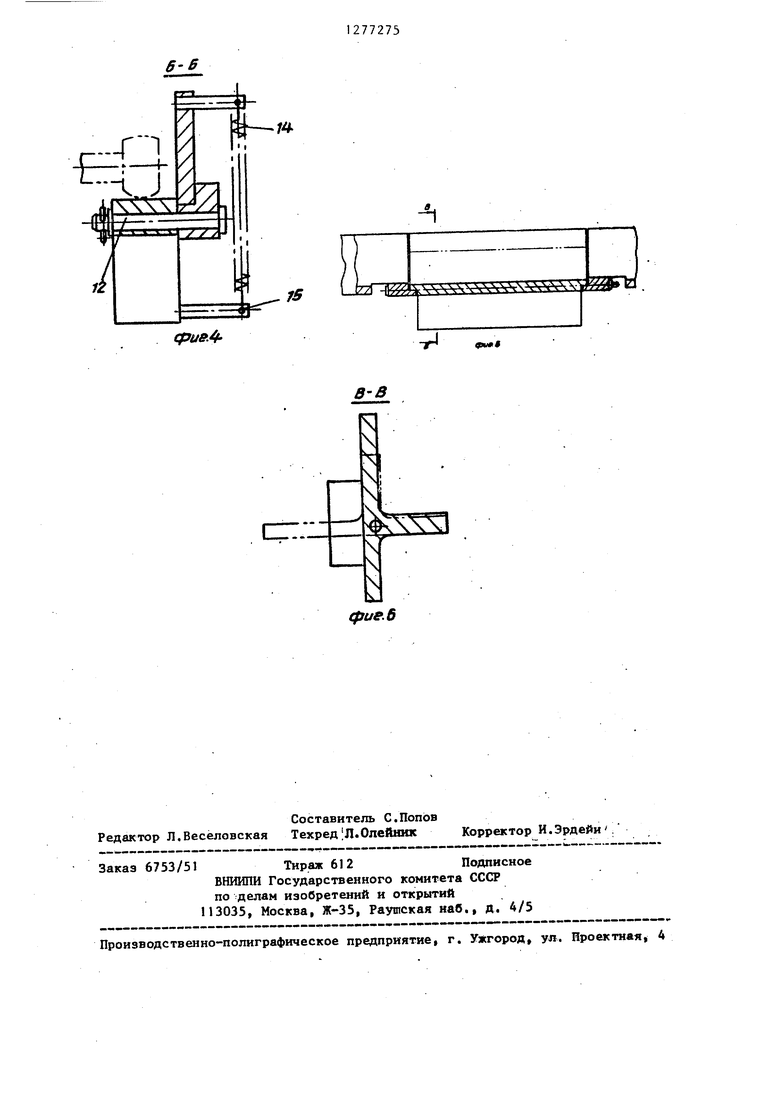
На фиг, 1 показано предлагаемое устройство, обш,ий вид; на фиг. 2 - разрез А-А на фиг. 1; на фиг. 3 - узел I на фиг. 1; на фиг, 4 - разрез Б-Б на фиг. З; н а фиг, 5 --.опорная площадка,вариант исполнения; на фиг. 6 - разрез В-В на фиг. 5.
Устройство состоит из цепи с шар нирно соединенными звеньями 1 (фиг, между которыми установлены колодки 2 (фиг. 2) с отверстиями 3 для укладки кабелей и шлангов. На цепи с шагом, определяемым из условий «жесткости безопорных участков цепи 1, расположены пары опорных роликов 4. Расстояние между роликами в парах по всей длине цепи постоянно, а сам ролики закреплены на осях 5, закрепленных на звеньях цепи 1.
С помощью цепи связаны подвижный объект 6 и неподвижный источник 7 энергии. Устройство имеет две жестко закрепленные на основании 8 направляющие планки 9 (фиг. 2, 3) с отдельными пазами 10 (фиг. 1) для прохода опорных роликов 4. Пазы расположены в месте отклонения опорных роликов подвижной ветви цепи от направляющих планок и имеют размер, определяемый конструкцией роликов и цепи.
Пазы 10 (фиг. 1) на направляющих планках 9 снабжены поворотными опорными площадками 11, выполненными в виде двуплечего рычага, консольно закрепленного на оси 12 с возмояшо- .стью взаимодействия с проходящим через этот паз опорным роликом и возможностью поворота относительно направляющей планки с фиксацией в -дву положениях. В одном положении (фиг. плечо а пово1 отной площадки 11 закрывает паз 10 и образует с направлющей планкой непрерывную опорную поверхность , в другом положении плечо
5
0
положно.
а поднято над пазом и не закрывает его (показано штрих-пунктиром). Для удержания площадки в одном из крайних положений служит механизм 13 фиксации (фиг, 2), включающий пружину 14 растяжения (фиг, 4), одним концом закрепленную на направляющей планке 9 в точке с, другим концом - на плече Ъ рычага в точке d с помощью кронштейна 15. Плечо Ъ рычага расположено под направляющей планкой с образованием во втором фиксированном положении зазора для прохода опорного ролика, В каждом из фиксированных положений пружина 14 создает момент силы относительно оси 12, препятствующий самопроизвольному повороту площадки в другое положение.
Моменты силы пружины относительно оси I2 в одном и другом положении опорной площадки направлены противо5
положно.
0
5
0
Механизм фиксации вынесен за опор- ную направляющую планку,
Устройство работает следующим образом,
В исходном положении большая часть цепи нахрдится в нижней ветви цепи. Поворотные площадки, закрывающие пазы для прохода опорных роликов, находящихся в нижней ветви цепи, повернуты в первое положение, при котором плечо а закрывает паз. Пружина 14 препятствует смене положения опорной площадки.
При перемещении подвижного объекта 6 звенья цепи 1 с нижней ветви по радиусу переходят на верхнюю ветвь, при этом пары роликов 4, перемещаясь, проходят сквозь пазы 10 снизу вверх, толкая поворотную площадку снизу за плечо а. При этом за счет усилия со стороны ролика преодолевается момент силы пружины 14 и площадка поворачивается во Второе фиксированное положение по мере выхода ролика из паза на направляющую планку 9. При перемещении точки d по окружности вокруг оси 12 перемеща-. ется ось пружины, уменьшая момент силы Пружины относительно оси 12, при дальнейшем перемещении момент силы меняется на противоположный, способствующий дальнейшему переводу площадки в другое положение и 55 удержанию ее в этом положении. После прохождения ролика через паз площадка 1I остается в положении, когда плечо а не касается направля- .
45
50
IS
20
25
ющей планки, а ролик далее катится по закрытым еще опорным площадкам, которые открываются последующими опорными роликами, движущимися с нижней ветви цепи на верхнюю, 5
При обратном движении подвилшого объекта 6 звенья цепи переходят с верхней ветки цепи на нижнюю. При этом опорные ролики проходят через пазы в обратном направлении и воздей- О ствуют на плечо b площадки 11, стоящее на пути их движения. Площадка переводится в исходное положение, а опорные ролики переходят на нижнюю ветвь цепи. Последующие опорные ролики катятся по непрерывной опорной поверхности и переводят в исходное положе1ше соответствующие им площадки.
В качестве механизма фиксации могут быть использованы и другие конструктивные узлы, препятствующие самопроизвольному переводу опорной площадки из одного положения в другое и позволяющие осуцествлять смену положения площадки воздействием опорным роликом, например шариковые фиксаторы, кроме того,может быть использована также неуравновешенность площадки от сил тяжести.
Консольное закрепление поворотной площадки создает более благоприятные условия для качения роликов при воздействии на нее, но принципиально возможно. выполнение площадки с осью поворота параллельной направляющим планкам (см, фиг, 5 и 6). В этом случае ось закреплена с обеих сторон. Такое выполнение позволяет получить
Iного ролика непрерывную опорную дорожку.
Таким образом, опорный ролик при- движении по направляющей планке всегда имеет постоянный контакт с ней и, пересекая направляющую планку в строго определенном пазу, управляет положением соответствующей опорной площадки, переводя ее из одного положения в другое.
Применение поворотных опорных площадок позволяет сократить габариты устройства по ширине без ограничения хода подвижного объекта, а также выполнить все пазы в направля- юш,их планках, оси опорных роликов и 5 все конструктивные элементы опорных площадок однотипными.
Формула изобретения
1.Устройство для подвода энергии от неподвижного объекта к подвижному, содержащее цепь с шарнирно соединенными звеньями, на боковых сторонах которых по длине Цепи расположены пары опорных роликов, две неподвижно закрепленные на основании направляющие планки с пазами для прохода опорных роликов, расположенные с боковых сторон верхней ветви цепи, и гибкий энергоноситель, расположенный внутри цепи, отличающееся тем, что, с целью уменьшения габаритов и материалоемкости устройства при увеличении хода подвижного объекта
и одновременного повышения технологичности изготовления устройства,оно снабжено опорными площадками по числу пазов для прохода роликов и механизмом фиксации их положения, каждая опорная площадка выполнена в виде двуплечего рычага,закрепленного на основании в зоне паза с возможностью взаимодействия с проходящим через этот паз опорным роликом и возможностью поворота относительно направляющей планки с фиксацией в двух крайних положениях,при этом одно из плеч рычага выполнено с возможностью образования с направляющей планкой в
для каждрго опор- дп фиксированном положении непрерывной опорной поверхности, а Другое плечо рычага расположено под направляющей планкой с образованием во втором фиксированном положении зазора для прохода опорного ролика.
2.Устройство по п. 1, отличающееся тем, что механизм фиксации выполнен в виде пружины растяжения, одним концом закрепленной на направляющей планке, а вто- рым - на плече рычага, расположенном под направляющей планкой.
30
35
45
50
5
й- О 1277275
ты устройства по ширине без ограничения хода подвижного объекта, а также выполнить все пазы в направля- юш,их планках, оси опорных роликов и 5 все конструктивные элементы опорных площадок однотипными.
Фиг.2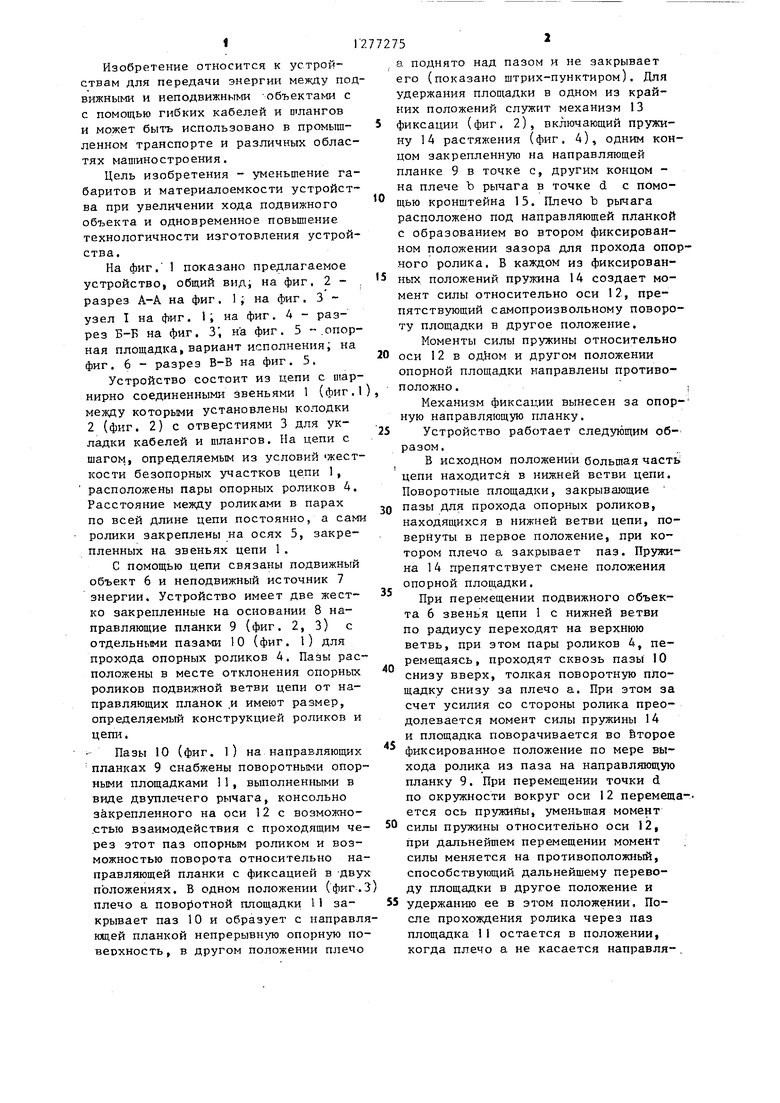
| название | год | авторы | номер документа |
|---|---|---|---|
| ПРУЖИНОНАВИВОЧНЫЙ АВТОМАТ, ЕГО МЕХАНИЗМЫ РУБКИ, ОБРАЗОВАНИЯ УЗЛА, ПЕРЕМЕЩЕНИЯ ЗАГОТОВОК (ВАРИАНТЫ), ИХ УСТРОЙСТВА ЗАХВАТОВ, ПОДВИЖКИ, ОРИЕНТАЦИИ, ЗАЖИМА, КУЛАЧКОВЫЕ СРЕДСТВА | 2002 |
|
RU2199412C1 |
| Устройство для подвода энергии от неподвижного объекта к подвижному | 1986 |
|
SU1372443A1 |
| Устройство для подвода энергии от неподвижного источника к подвижному потребителю | 1981 |
|
SU1042120A1 |
| АВТОМАТИЧЕСКИЙ МЕХАНИЗМ ЗАРЯЖАНИЯ ПУШКИ | 2001 |
|
RU2195617C1 |
| ТУРНИКЕТ | 1993 |
|
RU2049900C1 |
| Устройство для подачи многослойного настила к вырубочному прессу | 1981 |
|
SU1036648A1 |
| Устройство для вывода пачек писем из автоматической письмосортировочной машины | 1977 |
|
SU692766A1 |
| АВТОПОЕЗД | 1997 |
|
RU2131369C1 |
| УСТРОЙСТВО ДЛЯ НАКОПЛЕНИЯ И ХРАНЕНИЯ ШТУЧНЫХ ГРУЗОВ | 1997 |
|
RU2129086C1 |
| Автоматическая линия для многопереходной штамповки | 1987 |
|
SU1565563A1 |
Изобретение, относится к электротехнике и может быть использовано для передачи энергии с помощью гибких кабелей или шлангов. Цель изобретения- уменьшение габаритов и материалоемкости устр-ва при увеличении хода подвижного объекта и одноврв1-1еиное повьштение технологичности. Устр-во содержит цепь с uiap- нирно соединенными звеньям 1 1 , на кото.рых установлены пары опорных роликов (р) 4 и 1гаправляющие планки с пазами 10 для прохода опорных Р 4. В зоне каждого паза 10 установлена опорная площадка 1I, выполненная в виде двупле его рычага, консольно закреплеипого на оси с возможностью взаимодействия с проходяпа- м через этот паз опорным Р 4 и возможностью поворота относительно направляющей пла}п и с фиксацией в двух крайних положениях меха1 измом фиксации, например, в виде пр жины растяжения. Опорный Р 4 при движении по направляющей планке всегда имеет постоян- ньш контакт с ней и, пересекая направляющую плапку в определенном пазу, упраг ляет положенпем соответст- вутощей опорной площадки 1 1 переводя ее из одного положения в другое. Такое выполнение устр-са позволяет сократить его габариты по ширине без ограничения хода подвижного объекта, а также выполнить элементы конструкции однотипньп-1И. I з.н. ф-лы, 6 ил. а С/) «VI rsP О1
фиг.З
| Устройство для гибкого токоподвода от неподвижного энергоисточника к подвижному энергоприемнику | 1981 |
|
SU993373A1 |
| Аппарат для очищения воды при помощи химических реактивов | 1917 |
|
SU2A1 |
| Аппарат для очищения воды при помощи химических реактивов | 1917 |
|
SU2A1 |
