Изобретение относится к электротехнике и может быть использовано в электро- приводах постоянного тока.
Целью изобретения является расширение диапазона регулировапия за счет улу пнения ре1 улировоч11ых характеристик в режиме прерывистых токов и улучн1ение энергетических показателей.
На фиг. 1 приведена схема электроприводов; на фиг. 2 и 3 характеристики, поясняющие работу электрогфивода.
Электропривод постоянного тока содержит электродвигатель 1, шунтированный цепью динамического торможения, СОСТОЯНАИЙ из ключа 2 и резистора 3, нос.чедовате.пьио соединенных и подключенный к выходу преобразователя 4, вход которого соединен с первым выходом системы 5 импульспо-фазо- вого управления, первый датчик 6 тока в цепи преобразователя, второй датчик 7 тока в цепи динамического торможепия, последовательно соединенные датчик 8 частот1 1 вращения, регулятор 9 частоты вращения, снабженный вторым выходом, и первый регулятор 10 тока, выход которого соединен с входом системы 5 импульспо-фазового управления, блок 11 управления с двумя входами и выходом, соедипенны.м с ключом 2, нуль- орган 12, вход которого соединен с нс;звь м датчиком 6 тока, а выход - с первым входом блока 11 управления, интегратор 13 с обнулением и с тремя входами, первый из которых соединен с первым датчико 5 6 тока, а второй - - с вторым выходом системы 5 импульспо-фазового управления.
Электропривод также содержит блок 14 регулируемой индуктивности, вк,чюченп1з1Й в цепь ди11амичсеко1Ч) торможения, третий датчик 15 тока, включенный в цепь э:1ек- тродвигателя 1 и выходом соединенный .: соответствующим входом первого регулятора 10 тока, второй регулятор 16 тока, выходом соединенный с входом блока 14 регулируемой индуктивности, причем входы второго регулятора 16 тока соедине1П)1 с выходами соответственно интегратора 13 и второго датчика 7 тока, третий вход И1::тегра- тора 13 подключен к второму выходу регулятора 9 частоты вращения, второй вход блока 11 управления соединен с третьим выходом системы 5 импульсно-фазового управления. Сглаживающий дроссель 17 включен последовательно в цепь преобразователя 4.
Устройство работает следующим образом.
Система 5 импульсно-фазового управления обеспечивает поочередную- подачу импульсов управлепия на тириеторный преобразователь 4. Контроль режима работы преобразователя осуществляется при помощи датчика 6 тока, включенного в цепь тири- сторного преобразователя. Выход датчика 6 .через нуль-орган 12 еоединен с блоком 1 унравлепия тиристорногч) ключа 2.Бла1Ч)- даря такому включени О па выходе Г1ул1 0
5
0
5
0
органа 12 в случае спижепня тока преобразователя до нуля появляется сигнал. Этот сигнал в м()М(пт токочой паузы преобразователя воздействует па блок 11 унравлепия С ф1Ормироваппый блоком 1 1 управления им- ny.ibc подается на уг1равляюп 1ий электрод тиристорпого ключа 2. Тириеторпый ключ включается, замыкая цень резистора динамического торможения через регулируемую индуктивность 14 и датчик 7 тока на якорную цень двигателя. По цепи динамического торможения протекает тормозной ток, который еозд;ает тормозной момент, и двигатель начинает тормозиться. Вследствие этого его скорость уменьщается и механическая характеристика в зоне прерывистых токов стано- ится более жесткой. Отключение тиристор- Hoi o ключа осуществляется в момент подачи импульса управления с системы 5 импульс- но-сразового управления на блок 1 1 управления с одновременным включением тиристоров преобразователя 4. Благодаря индуктивности 14, включен11ой последовательно ре- :и1стору 3 динамического торможения, тормозной ток возрастает по эксноненциально.му : акону до величины, онределяемой значением ЭДС двигателя и суммарпы.м сопро- 1-иплепнем якорной цепи в режиме динами- ческог о торможения. Значение тор.моз- ного тока контролирубтся датчиком 7 тока. Степень выравнивания механичеекой ха- рактериетики в зоне прерывистых токов, как с.педует из фиг. 2, завиеит от величины тока динамичеекого торможения. Средняя величина этого тока при задаппой скорости двигателя определяется разностью среднего значения тока преобразователя, создающего двигательный режим, и тока двигателя в нредположепии линейности механической характеристики, т.е.
Г1
где 1лг -- относительное среднее значение тока динамического торможения, соответствующее линейной механической характеристике; i;ii. - относительное среднее значение
тока преобразователя; i, - - относительное среднее значение тока двигате я в нредиоложении линейности м(ханической характе-. ристики.
Разность этих средних значений, опре- деляюни1х ток задания цепи динамического торможения, непрерывно с)авпивается с действительным средним значением тока динамического торможения на входе регулятора 16 тока.
Полученный па выходе интегратора сигнал тока задания цeп дипамичеекого торможения подается на первый вход второго регулятора 16 тока, второй вход этого регулятора соединен с выходом второго датчика 7 тока. На выходе второго регулятора 16
тока получают сигнал управления, который воздействует на вход блока 14 регулируемой индуктивности. Пропорционально сигналу управления меняется индуктивность в цепи динамического торможения, изменяя форму тока и, следовательно, его среднее значение.
Возврат интегратора 13 в нулевое положение производится в момент подачи очередного импульса на тиристоры преобразователя 4. Для этого выход системы 5 импульсно-фазового управления соединен со сбрасывающим входом интегратора 13.
Цепь, состоящая из регулятора 16 тока цепи динамического торможения регулируемой индуктивности 14, включенной после- довательно резистору 3 динамического торможения, двигателя I и датчика 7 тока, представляет собой контур стабилизации тока динамического торможения, который предназначен для спрямления механической характеристики систе.мы привода.
Включение в цепь регулятора тока динамического торможения блока с регулируемой индуктивностью позволяет при заданном среднем значении тока получить требуемую форму тока динамического тормо- жения, исключив токовую паузу. В результате получают линейные механические характеристики на всем диапазоне регулирования и улучшенные энергетические показатели. С целью получения минимально возможной индуктивности в цепи динамического торможения сглаживающий дроссель включен последовательно в цепь тиристорного преобразователя.
Контур динамического торможения работает с момента появления токовой паузы тиристорного преобразователя до момента подачи на его вход очередного импульса управления. При это.м одновременно отключается и тиристорный ключ 2.
Второй контур тока, состоящий из регулятора 10 тока, тиристорного преобразователя 4 с системой 5 импульсно-фазового управления, сглаживающего дросселя 17, двигателя 1 и датчика 6 тока, предназначен для стабилизации тока двигателя.
С подачей очередного импульса управления на преобразователь 4 работа систе- мы повторяется.
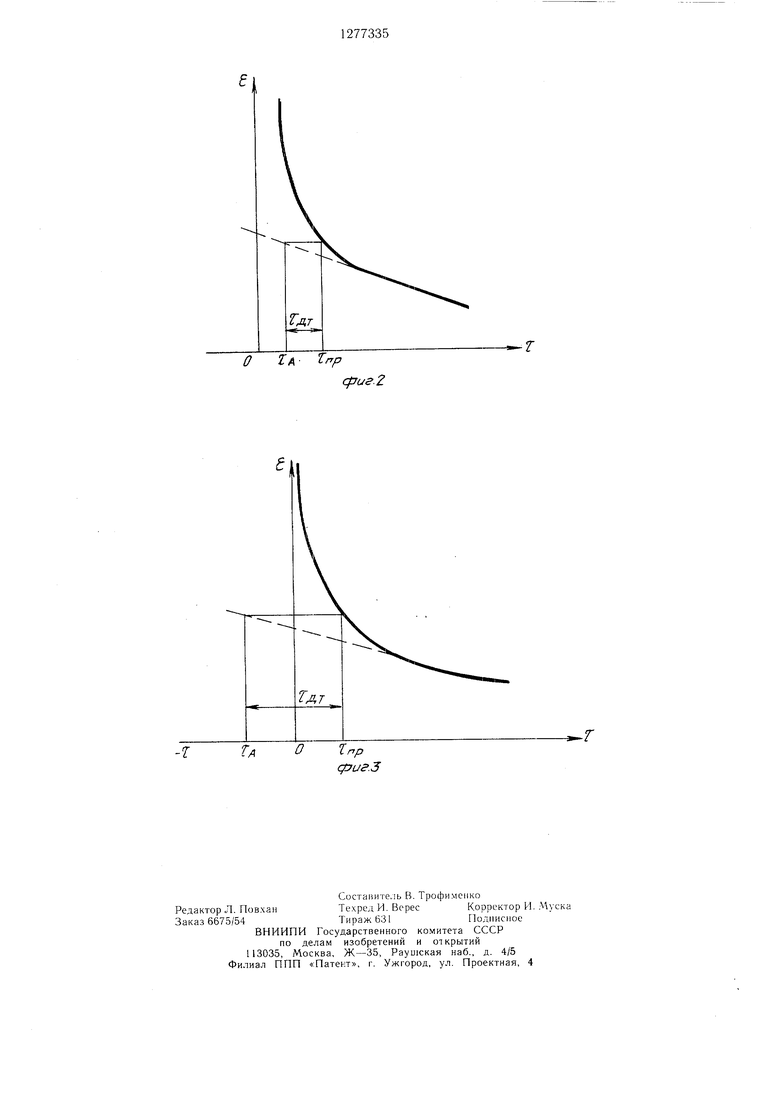
В случае перемены знака статического момента ток динамического торможения увеличивается, а ток якоря меняет свой знак (фиг. 3), и двигатель работает в режиме динамического торможения, т.е. рабочая точ- ка находится во втором квадранте на продолжении механической характеристики систем ы.
Для улучшения статических и динамических качеств системы предусмотрена отрицательная обратная связь по скорости и току, которая осуществляется при помощи датчика 8 скорости и датчика 15 тока.
Механические характеристики в зоне прерывистых токов носят линейный характер и не зависят от того, в каком режиме работает двигатель - в двигательном или тормозном. В случае перемены знака статического момента на валу двигателя тормозной режим осуществляется по линейной механической характеристике, что позволяет получить плавный непрерывный ток в якорной цепи двигателя, улучшить энергетические показатели.
Формула изобретения
Электропривод постоянного тока,содержащий электродвигатель, щунтированный цепью динамического торможения, состоящей из последовательно соединенных резистора и ключа, нодключенный к выходу преобразователя, вход которого соединен с первым выходом системы импульсно-фазового управления, первый датчик тока в цепи преобразователя, второй датчик тока в цепи динамического торможения, последовательно соединенные датчик частоты вращения, регулятор частоты вран1,ения, снабженный вторым входом, и первый регулятор тока, выход которого соединен с входом системы импульсно-фазового управления, блок управления с двумя входами и выходом, соединенным с ключом, нуль-орган, вход которого соединен с первым датчиком тока, а выход с - первым входом блока управления, интегратор с обнулением и с тремя входами, первый из которых соединен с первым датчиком тока, а второй - с вторым выходом системы импульсно-фазового управления, отличающийся тем, что, с целью расширения диапазона регулирования за счет улучшения регулировочных характеристик в режиме прерывистых токов и улучшения энергетических показателей, в него введены блок регулир емой индуктивности включенный в цень динамического торможения, третий датчик тока, включенный в цепь электродвигателя и выходом соединенный с соответствующим входом первого регулятора тока, второй регулятор тока, выходом соединеин1)1Й с входом блока регулируемой индуктивности, причем входы второго регулятора тока соединены с выходами соответственно интегратора и второго датчика тока, третий вход интегратора нод- ключен к втором выходу регулятора частоты враи1еиия, второй вход б/юка управ.че- ния соединен с третьим выходом системы имиу;1Ьсно-фаз(Л)()1 О упра1, 1еиия.
О ТА Тпр
- Г
ери г. 2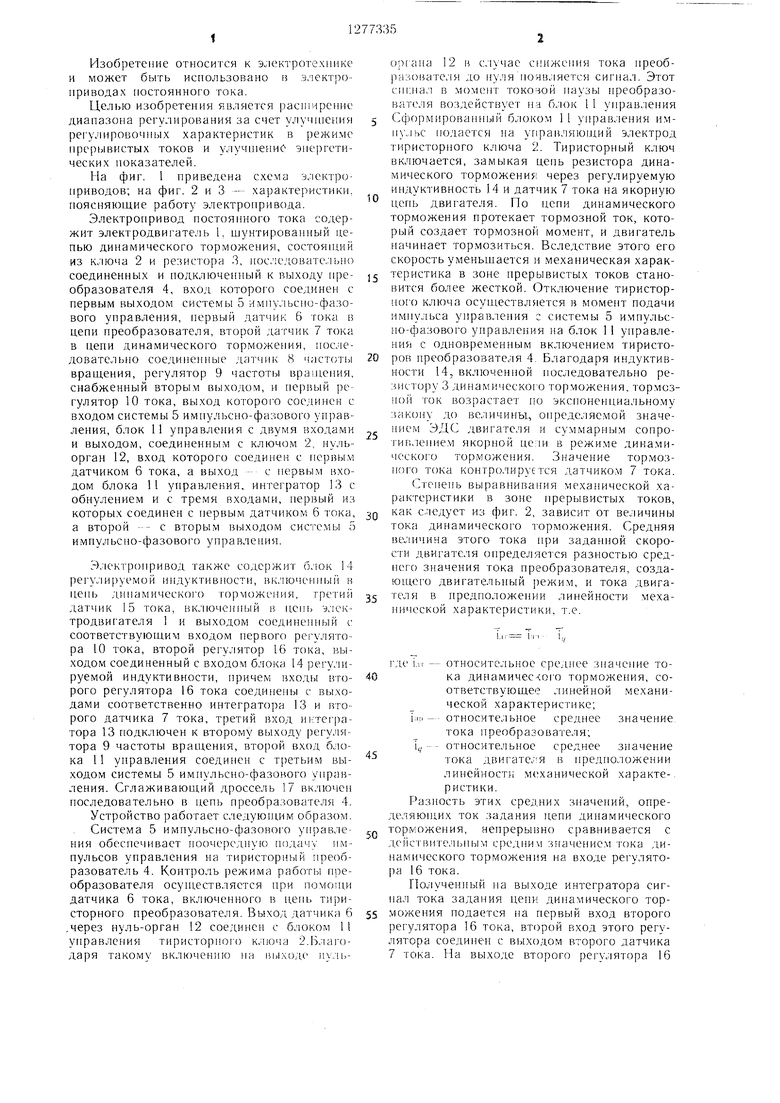

| название | год | авторы | номер документа |
|---|---|---|---|
| СХЕМА ПИТАНИЯ ЭЛЕКТРОПРИВОДА СО СГЛАЖИВАЮЩИМ ДРОССЕЛЕМ В ЦЕПИ ПОСТОЯННОГО ТОКА | 2002 |
|
RU2224350C2 |
| Устройство для управления электро-дВигАТЕлЕМ пОСТОяННОгО TOKA | 1976 |
|
SU797041A1 |
| Электропривод постоянного тока | 1991 |
|
SU1815786A1 |
| Реверсивный вентильный электропривод | 1983 |
|
SU1141552A1 |
| РЕВЕРСИВНЫЙ ТИРИСТОРНЫЙ ЭЛЕКТРОПРИВОД | 1995 |
|
RU2103797C1 |
| Система управления реверсивным тиристорным электроприводом | 1975 |
|
SU566293A1 |
| Управляемый электропривод | 1980 |
|
SU1034016A1 |
| Электропривод постоянного тока | 1977 |
|
SU681528A1 |
| УСТРОЙСТВО УПРАВЛЕНИЯ ЭЛЕКТРОПРИВОДОМ | 1973 |
|
SU375743A1 |
| СПОСОБ РОВЕНСКОГО ДЛЯ УПРАВЛЕНИЯ РЕВЕРСИВНЫМ ВЕНТИЛЬНЫМ ЭЛЕКТРОПРИВОДОМ И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 1986 |
|
SU1833094A1 |
Изобретение относится к электротехнике и может быть использовано в электроприводах постоянного тока. Расширение диапазона регулирования и улучшение энергетических показателей обеспечивается за счет введения блока 14 регулируемой индуктивности и двух датчиков тока 7 и 15 в цепях динамического торможения и якорной обмотки электродвигателя I. Выходы датчиков токов 15 и 7 соединены соответственно со в.ходами регуляторов тока 10, 16, причем выход регулятора тока 16 подключен ко входу блока 14 регулируемой индуктивности. Механические характеристики в зоне прерывистых токов носят линейный характер и не зависят от того, в каком режиме работает двигатель - в двигательном или тормозном. В случае перемены знака статического момента на валу двигателя тормозной режим осун1ествляется по линейной механической характеристике, что позволяет получить плавный непрерывный ток в якорной цепи двигателя и улучшить энергетические показатели. 3 ил. « (/) 1ранссрорматор N3 00 со СП 9аг.1
-I
ТА О Тпр
(риг.З
| Устройство двукратного усилителя с катодными лампами | 1920 |
|
SU55A1 |
| Аппарат для очищения воды при помощи химических реактивов | 1917 |
|
SU2A1 |
| Электропривод постоянного тока | 1984 |
|
SU1203680A1 |
| Аппарат для очищения воды при помощи химических реактивов | 1917 |
|
SU2A1 |
