2. Устройство по п. 1, о т л ,и чающееся тем, чТо эталонная модель содержит мультивибратор и последовательно соединенные первый ключ, иТчтегратор, пропорциональнодифференцирующее звено, элемент памяти и второй ключ, подключенный выходом ко второму входу интегратора, а вторым входом - к первому выходу мультивибратора, второй вход которого подключен ко второму входу первого ключа.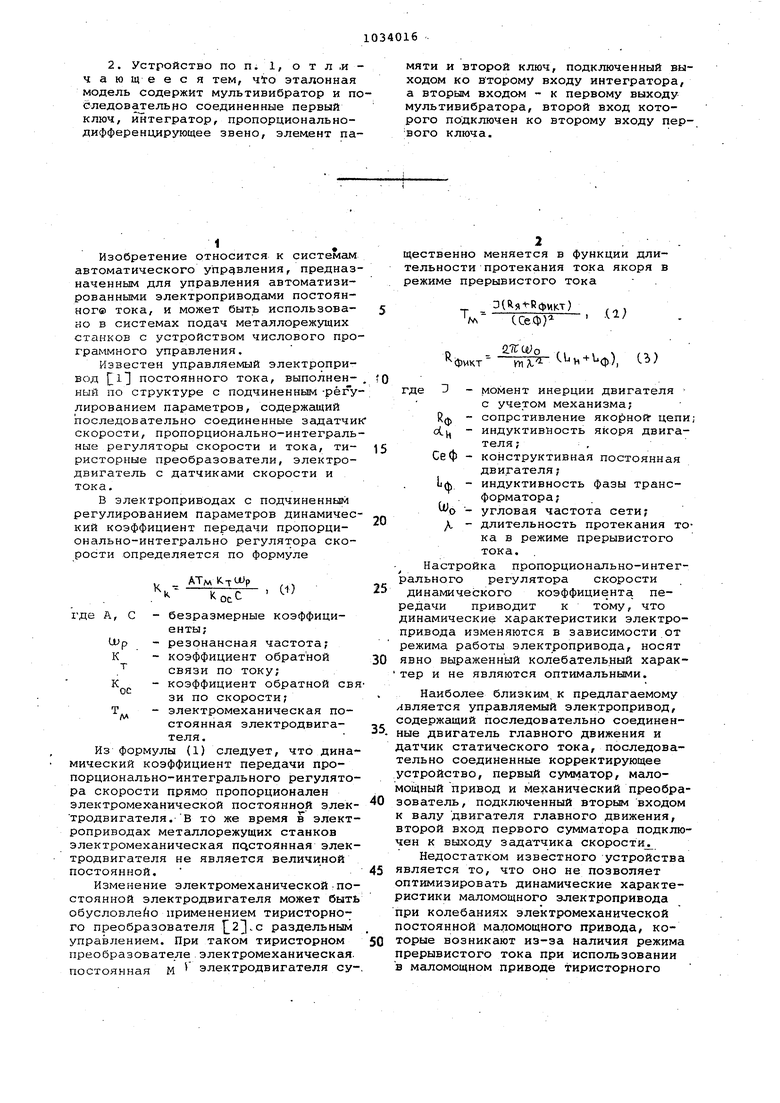

| название | год | авторы | номер документа |
|---|---|---|---|
| ЭЛЕКТРОПРИВОД ПОСТОЯННОГО ТОКА | 1990 |
|
RU2011286C1 |
| СПОСОБ АВТОМАТИЧЕСКОГО УПРАВЛЕНИЯ ПАРАМЕТРАМИ ЭЛЕКТРОМЕХАНИЧЕСКОЙ СИСТЕМЫ И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2010 |
|
RU2414048C1 |
| Система управления электроприводом | 1985 |
|
SU1283712A1 |
| Электропривод постоянного тока с оптимальным управлением | 1986 |
|
SU1471274A1 |
| Самонастраивающаяся система регулирования скорости | 1984 |
|
SU1180844A2 |
| УСТРОЙСТВО ДЛЯ АВТОМАТИЧЕСКОГО УПРАВЛЕНИЯ ЭЛЕКТРОМЕХАНИЧЕСКОЙ СИСТЕМОЙ С ВЯЗКОУПРУГОЙ КИНЕМАТИЧЕСКОЙ СВЯЗЬЮ | 2010 |
|
RU2446552C2 |
| УСТРОЙСТВО ДЛЯ АВТОМАТИЧЕСКОГО УПРАВЛЕНИЯ ЭЛЕКТРОМЕХАНИЧЕСКОЙ СИСТЕМОЙ | 2010 |
|
RU2428735C1 |
| Управляемый электропривод постоянного тока | 1974 |
|
SU499554A1 |
| Способ управления тиристорным электроприводом постоянного тока и устройство для его осуществления | 1982 |
|
SU1061227A1 |
| Самонастраивающаяся система регулирования скорости | 1981 |
|
SU1007083A1 |
1. УПРАВЛЯЕМЫЙ ЭЛЕКТРОПРИВОД, содержащий- последовательно соединенные двигател главного движе.ния и датчик статического тока, последовательно соединенные корректирующее устройство, первый сумматор, маломощный привод и механический преобразователь, подключенный вторым входом к валу двигателя главного движения, второй вход первого сумматора подключен к выходу задатчика скорости ,о т л и ч а ю щ и и с я тем,что,с целью обеспечения инвариантности управляемого электропривода по отношению к электромеханической постоянной времени маломощного привода, электропривод содержит последовательно соединенные второй сумматор, эталонную модель и третий сумматор, подключенный, вторым входом к третьему входу первого сумматора и ко второму выхоО) ду маломощногопривода, подключенного третьим выходом к первому вхоС ду второго сумматора, второй вход которого подключен к выходу датчика е статического тока. . . с О :/ 4 О
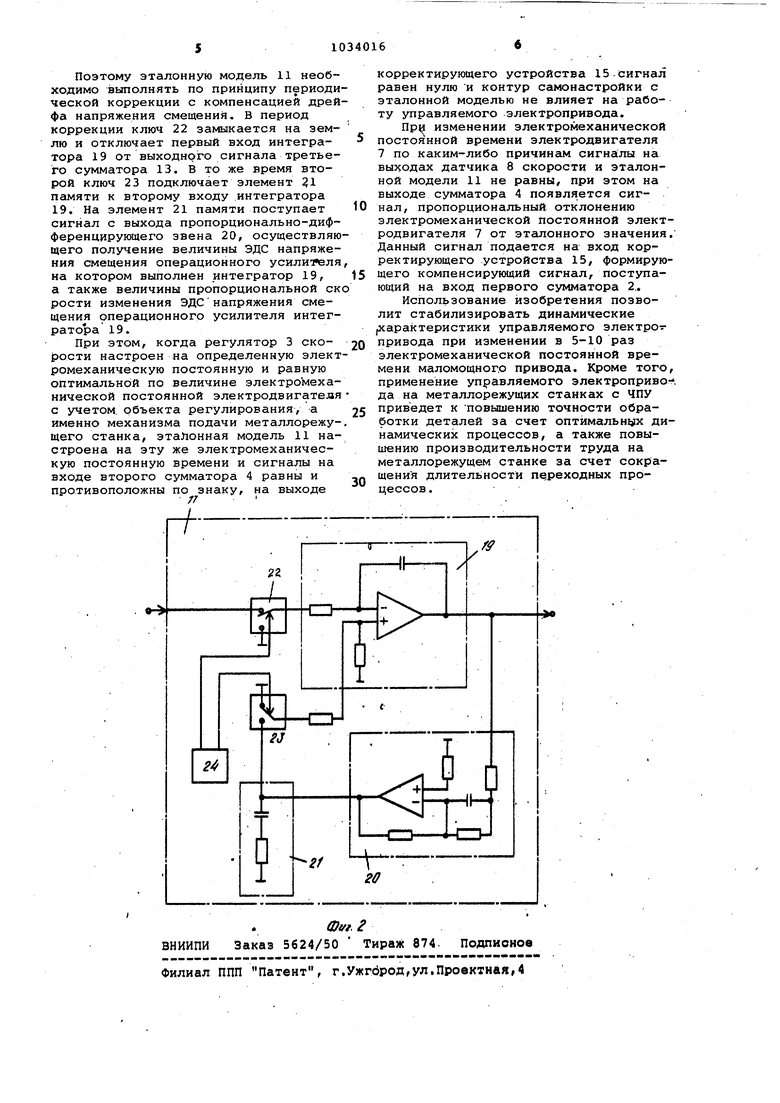
Изобретение относится к системс1М автоматического управления, предназ наченным для управления автоматизированными электроприводами постоянног® тока, и может быть использовано в системах подач металлорежущих станков с устройством числового про граммного управления. Известен управляемый электропривод l3 постоянного тока, выполненный по структуре с подчиненным -рёзгу лированием параметров, содержащий последовательно соединенные задатчи скорости, пропорционально-интеграль ные регуляторы скорости и тока, тиристорные преобразователи, электродвигатель с датчиками скорости и тока. В электроприводах с подчиненным регулированием параметров динамичес кий коэффициент передачи пропорционально-интегрально регулятора скорости определяется по формуле АТмК-ти р ГЧ . ,, 1де А, С - безразмерные коэффициенты;резонансная частота; коэффициент обратной связи по току; коэффициент обратной св зи по скорости; электромеханическая постоянная электродвигателя. Из формулы (1) следует, что динамический коэффициент передачи пропорционально-интегрального регулятора скорости прямо пропорционален электромеханической постоянной электродвигателя. В то же время в электроприводах металлорежущих станков электромеханическая постоянная электродвигателя не является величиной постоянной. Изменение электромеханической-постоянной электродвигателя может быть обусловлено применением тиристорного преобразователя 2.0 раздельным управлением. При таком тиристорном преобразователе электромеханическая. постоянная М электродвигателя существенно меняется в функции длительности протекания тока якоря в режиме прерывистого тока Э(я- Вфикт) м ССеФ} ЙПС ), - момент инерции двигателя с учетом механизма; йф - сопротивление цепи; сХ.ц - индуктивность якоря двигателя ; Сеф - конструктивная постоянная двигателя; индуктивность фазы трансформатора;угловая частота сети; длительность протекания тока в режиме прерывистого тока. Настройка пропорционально-интегрального регулятора скорости динамического коэффициента передачи приводит к тому, что динамические характеристики электропривода изменяются в зависимости,от режима работы электропривода, носят явно выраженный колебательный характер и не являются оптимальными. Наиболее близким, к предлагаемому лвляется управляемый электропривод, содержащий последовательно соединенные двигатель главного движения и датчик статического тока, последовательно соединенные корректирующее устройство, первый сумматор/ маломощный привод и механический преобразователь, подключенный вторым входом к валу двигателя главного движения, второй вход первого сумматора подключен к выходу задатчика скорости Недостатком известного устройства является то, что оно не позволяет оптимизировать динамические характеистики маломощного электропривода при колебаниях электромеханической постоянной маломощного привода, которые возникают из-за наличия режима прерывистого тока при использовании в маломощном приводе тиристорного преобразователя с раздельным управле нием., Пульсирующий момент маломощного привода (частота пульсации ЗОСГГц для электроприводов с мостовьоми тиристорными выпрямителями) передается через механический дифференциал на привод главного движения. При этом происходит сглсокивание пульсаций момента, развиваемого маломощным приво дом, как и порождаемБМ упругостью самого механического ди.фференциала ввиду наличия у обоих двигателей большой электромагнитной и электроме ханической постоянной. Причем электромеханическая постоянная времени двигателя главного движения всегда намного больше, чем электромеханическая постоянная времени у двигателя маломощного привода, в связи с тем, что мощность у двигателя главно го движения металлорежущего.станка как правило на порядок больше мощности двигателя механизма подачи. В связи с этим ла выходе .датчика тока привода главного движения (двигателя переменного тока) нккакой информации о пульсациях момента и изменения электромеханической постоянной маломощности привода не будет, вследствие чего известное устройство обладает неудовлетворительными динамическими характеристиками. Цель изобретения - обеспечение инвариантности управляемого электропривода по отношению к электромеханической постоянной времени маломощного привода.. Поставленная цель достигается тем что управляемый электропривод содер жит последовательно соединенные вто рой сумматор, эталонную модель и тре тий сумматор, подключенный вторым входом к третьему входу первого сум матора и ко второму выходу маломощного привода, подключенного третьим (ВЫХОДОМ к первому входу второго сум матора, второй вход которого подклю чен к выходу датчика статического . тока. Кроме того, эталонная модельэ электропривода с:одержит мультивибратор и последовательно соединенные первый ключ, интегратор, пропорционально-Дифференцирующее звено, элемент памяти и второй ключ, подключен ный выходом ко второму входу интегра тора, а вторым входом - к первому вы ходу мультивибратора, второй .выход которого подключен ко второму входу первого ключа. На фиг.. 1 изображена функциональная блок-схема управляемого электропривода; на фиг. 2 - схема эталонной модели. Управляемый электропривод (фиг.1 содержит задатчик 1 скорости, первы сумматор 2, регулятор скорости 3, второй сьмматор 4,. регулятор 5 тока, тиристорный преобразователь 6, электродвигатель 7, датчик 8 скорости, датчик тока 9 с шунтом 10 и эталонную модель 11, датчик 12 статического тока, третий сумматор 13, четвертый сумматор 14, корректирующее устройство 15, маломощный привод 16, механический преобразователь 17, двигатель.18 главного движения. Эталонная модель 11 (фиг. 2) содержит интегратор 19, пропо.рционально-дифференцирующее звено 20, элемент 21 памяти, первый ключ 22, -второй ключ 23 и мультивибратор 24. При использовании управляемого электропривода в силовом приводе в качестве механического преобразователя может быть, например, механический дифферен 1иал, а в приводе металлорежущего станка - механическая система (станок - приспособление инструмент - деталь). Управляемый электропривод работает следующим образом. Последовательное соединение задатчика скорости 1, первого сумматора 2, регулятора 3 скорости, четвертёго сумматора 14, регулятора 5 тока, тиристорного преобразователя б, электро двигателя 7, датчика 8 скорости -и датчика 9 тока с шунтом 10 образуют двухконтурную систему с подчиненным регулированием параметров. Сигнал с выхода датчика 9 тока подается на второй сумматор 4, к которому поступает также сигнал с датчика 12 статического тока. Датчик 12 статического тока управляемого электропривода выполнен .как датчик тока двигателя 18 главноно- движения в связи с тем, что ток двигателя главного движение является током статической нагрузки маломощного привода. Сигнал с выхода второго сумматора 4 является динамическим током электродвигателя 7 и сигнал на выходе эталонной модели 11 соответствует эталонной скорости электродвигателя 7. Причем эталонная модель 11 описывает часть передаточной функции электродвигателя 7. Переда-, точная функция эталонной модели 11 имеет вид (p)где - сопротивление якорной цепи электродвигателя; СеФ - конструктивная постоянная электродвигателя. Передаточная функция эталонной модели 11 представляет собой интегрирующее звено. При этом выполнении модели 11 на базе операционного усилителя она может входить в насыщение за счет ЭДС смещения операционного усилителя и за счет температурного дрейфа ЭДС смещения.
| Печь для непрерывного получения сернистого натрия | 1921 |
|
SU1A1 |
| Поэднеев А.Д | |||
| Динамика вентильного электропривода | |||
| М., Энергия , 1975, с | |||
| Плуг с фрезерным барабаном для рыхления пласта | 1922 |
|
SU125A1 |
| Аппарат для очищения воды при помощи химических реактивов | 1917 |
|
SU2A1 |
| Автоматизированный вентильный электропривод | |||
| М., Энергия, 1969, с | |||
| Способ получения борнеола из пихтового или т.п. масел | 1921 |
|
SU114A1 |
| Переносная печь для варки пищи и отопления в окопах, походных помещениях и т.п. | 1921 |
|
SU3A1 |
| Кипятильник для воды | 1921 |
|
SU5A1 |
