Изобретение относится к радиотехнике и может быть использовано в мнгоканальных системах передачи дискретной информации.
Цель изобретения - повьшение пом хоустойчивости.
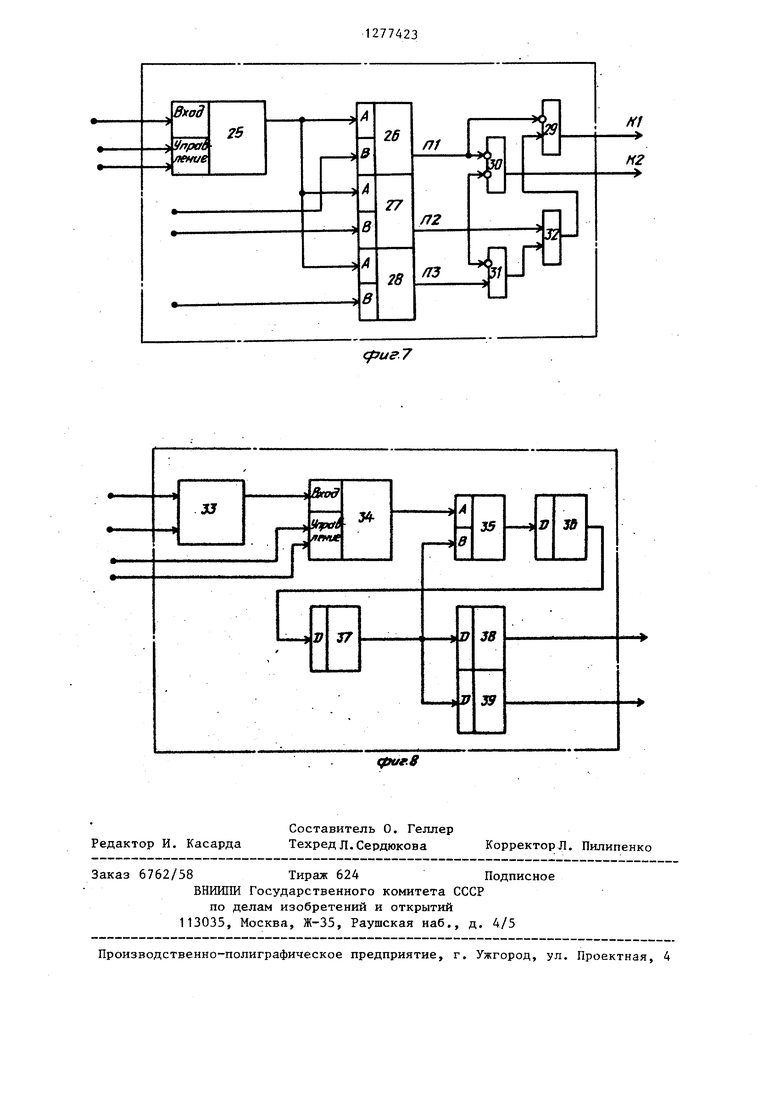
На фиг. 1 изображена структурная электрическая схема демодулятора; н фиг. 2 .- временная диаграмма; на фиг. 3 - структурная электрическая схема блока вычисления разности фаз на фиг. 4 - структурная электрическ схема перекодирующего блокад на фиг. векторная диаграмма сигналов; на фиг. 6 - структурная электрическая схема блока оценки искажений; на фиг. 7 - структурная электрическая схема кодирующего блока; на фиг. 8 структурная электрическая схема блр ка суммирования.
Демодулятор взаимоортогональных синусоидальных сигналов с фазораэно стной модуляцией содержит первые и |вторые активные фильтры 1 и 2, пер- |вый и второй формирователи 3 и 4 - опорных частот, первый и второй коммутаторы 5 и 6, блок 7 вычисления разности фаз, блок 8 оценки иска
жения, блок 9 суммирования,выходной согласующий блок 10. Блок вычисления разности фаз содержит вычислительный блок 11, запоминающий блок 12, преобразователь 13 обратного кода, сумматор 14, перекодирующий блок 15.
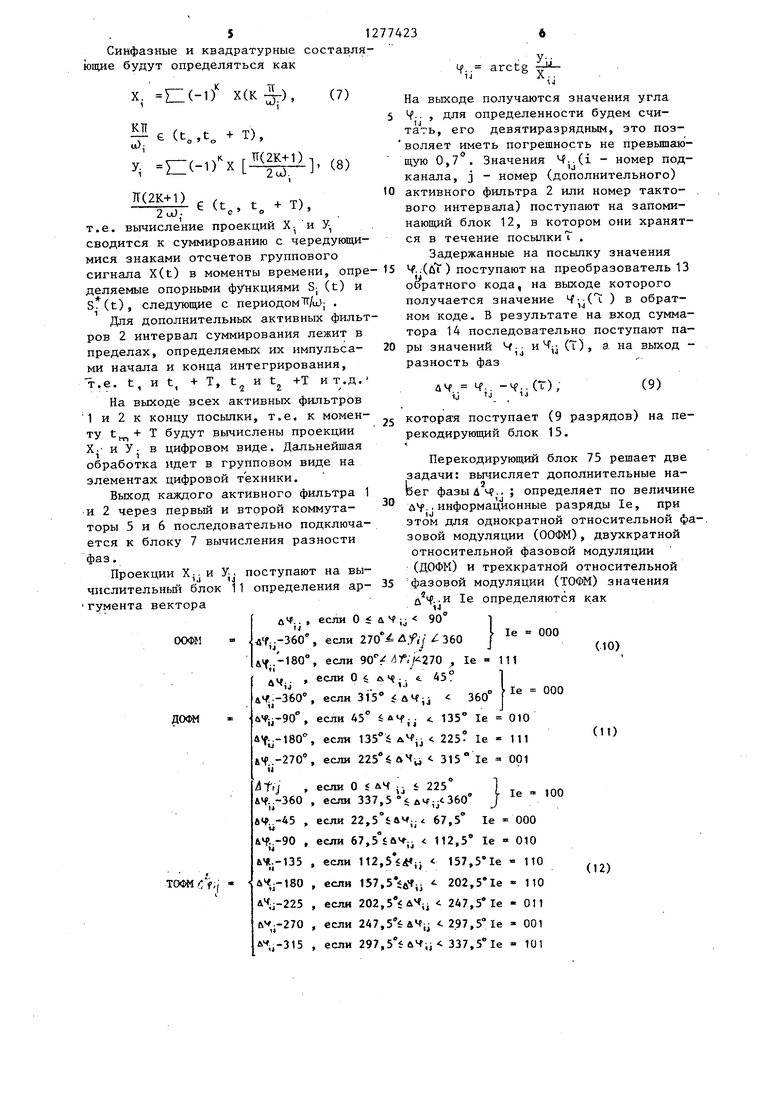
Блок оценки искажений содержит первый сумматор 16, первый регистр 17, первый запоминающий блок 18, первый и второй постоянные запоминающие блоки 19 и 20, второй сумматор 21 с кодером, третий сумматор 22, второй регистр 23, второй запоминающий блок 24. Кодирующий блок содержит регистр 25 сдвига, элементы 26-28 сравнения, элементы И 29-32.
Блок суммирования содержит коммутатор 33, регистр 34 сдвига, сумматор 35, регистр 36, запоминающий блок 37,статистические регистры 38 И 39.
Перекодирующий блок содержит сумматор 40 постоянный запоминающий блок 41.
Демодулятор работает следующим образом.
Активные фильтры 1 и 2 выполняют две функции: разделение ортогональны канальных сигналов и вычисление про
екций X. и У каждого i-ro канального сигнала на соответствующие ему по частотеtJ| квадратурные опорные колебания по формулам
X.,- 1 X(t) sincJ. t dt, (1) X(t) cosu).t dt, (2)
, -T
где X(t) - смесь группового сигнала
с помехой;
t - время начала интегрирования сигнала X(t); Т - интервал ортогональности. Синусоидальные и косинусоидальные колебания подаются на опорные входы активного фильтра 1(2), а сигналы, соответствукяцие началу интегрирования и концу интегрирования t.+T, - на установочный вход формирователя 3(4) опорных частот, при этом интервал интегрирования Т находится в середине посылки.
При выполнении ряда условий в качестве опорных колебаний могут использоваться знаковые функции вида
S,-(t)sign sini.t, S(t)sign соа,
получаемые формирователем 3(4) опор- ных колебаний, выполненным, например, на триггерных делителях частоты с обратными связями.
Блок 7 вычисления разности фаз представляет собой аналоговый или цифровой (для данного случая цифровой) вычислитель, выполняющий следующие операции
У (t.)
ч. (t.)arctg ЗПГТ (3)
u4.(th) 4,(tJ-4;(), (4)
где t и t - моменты времени, соответствующие окончанию соответственно п-1 и п посылок.
Далее, в соответствии с принятым алгоритмом кодирования информации каждому значению u4-(t) ставится в соответствие набор информационных
символов. Те, например, в случае одно- однократной относительной фазовой
модуляции, если
-
ТГ
4.(t) -у , то 1е О,
если - u4.(t)
W. то 1е 1.
В выходном согласующем блоке 10 информационные символы 1е каждого подканала последовательно выдаются абоненту. В качестве выходного сог- ласующе го блока 10 может, например, использоваться последовательный регистр с параллельной записью информации .
Необходимо отметить, что длительность интервала ортогональности Т выбирается меньшей длительности посыпки на величину защитного интервала д1 (Т 1 -д 1:з), исходя из противоречивых требований, а именно,увеличение длительности защитного интер вала позволяет работать с каналами связи, имеющими большую неравномерность амплитудно-частотной характеристики и характеристики группового времени запаздывания ГВЗ (проводной канал) или большую разность хода между лучами (многолучевость KB радиоканала) .
При этом часто величина дь является определяющей и выбирается суще- ственно большей (до - - L ) особенно в модемах, работающих по KB радиоканалам.
С другой стороны уменьшение величины Т существенно снижает помехоус- тойчивость по другому параметру - флуктуационным шумам. Действительно, потенциальная помехоустойчивость к флюктуационному шуму определяется отношением используемой энергии сиг- нала Е (Р - средняя мощность сигнала, Т - время его приема - длительность интервала ортогональности)
к спектральной мощности шума V
р (Рц, - средняя мощность шума в
используемой полосе частот F), т.е. величиной
Ь2 i ZaII
V
Использование защитного интервала at приводит к уменьшению полезной .энергии в Y раз.
В модемах отношение ф колеблется
в пределах от 1,1 до 1,5, что эквивалентно проигрьш1у по мощности на 0,8-3,4 дб, при этом дТ достаточно мал (0,79-2,76 мс), что не позволяет без предварительной подготовки работать по коммутируемым телефонным проводным и КБ радиоканалам, так как изменение характеристик ГВЗ лежит в
пределах 6 мс (для шести переприемных участков по низкой частоте, а многолучевости до 3-6 мс.
Формирователь 3(4) опорных частот вырабатывает набор опорных синфазных и квадратурных колебаний, например, вида
Sj (t)sign siniA).(t) ;S sign cosu3.t,
получаемых, например, на триггерных. делителях частоты с обратными связями и импульсы, соответствующие началу интегрирования t к концу интегрирования t,+T активных фильтров 1 и 2 (фиг.26).
Импульсы начала и конца интегрирования поступают на формирователь 4 опорных частот, который последовательно задерживает эти импульсы на вели& л
чину At - , где m - целое число in+1
Таким образом, получается ш дополнительных последовательностей импульсов, причем для первой последовательности импульс начала интегрирования t совпадает с границей посылки интервала t (фиг. 2а,б), а т-й последней последовательности импульс начала интегрирования t отстоит от начала посылки на величину (u . Для всех последовательностей импульс окончания интегрирования отстоит от импульса начала на величину интервала ортогональности Т, а основной интервал ортогональности с началом t расположен посередине дополнительных интервалов.
I
Формирователь 4 опорных частот легко реализуется различными способами на элементах цифровой техники, например, на сдвиговых регистрах,счетчиках, запоминаюш их устройствах.
Последовательность t поступает на первый активный фильтр 2 каждого канала, t, - на второй и т.д. Таким образом, для каждого активного фильтра 1 дополнительно имеется m дополнительных активных фильтров 2.
Все активные фильтры 1 и 2 выполнены одинаково. В качестве опорных колебаний используется знакопеременная последовательность S-функций
s:(t) &-i) S(t-M)
К--0
u)i
(5)
)
К--
(-1)4-1-. (6)
/ uJ с
51277423
Синфазные и квадратурные составляющие будут определяться как
, с:(-1/ х(к-5г).
X
(7)
- (t,t + Т).
)x B|biii,
2иЗ.
(8)
ТГ(2К+1)
2сх).
е (t . t + Т),
На выходе получаются значения угла 5 Ч .. , для определенности будем считать, его девятиразрядным, это поз- воляет иметь погрешность не превышающую 0,7 . Значения Ч-.С - номер подканала, 3 - номер (дополнительного) to активного фильтра 2 или номер такто- . вого интервала) поступают на запоминающий блок 12, в котором они хранятся в течение посылки Т .
Задержанные на посылку значения
т.е. вычисление проекций У, сводится к суммированию с чередующимися знаками отсчетов группового
сигнала X(t) в моменты времени, опре- 15Ч..(uY ) поступают на преобразователь 13
деляемые опорными функциями S| (t) иобратного кода, на выходе которого
S(t), следующие с периодом n /u j .получается значение ,j( ) в обратДля дополнительных активных фштьт-ном коде. В результате на вход сумма- ров 2 интервал суммирования лежит втора 14 последовательно поступают па- пределах, определяемых их импульса- 20ры значений Ч- и Ч. (Т), а на выход разность фаз
ми начала и конца интегрирования, т.е. t, и t, + Т, t, и tj, +Т ит.д.
На выходе всех активных фильтров 1 и 2 к концу посылки, т.е. к момен- которая поступает (9 разрядов) на пеЛЧ.. . -Ч-.. (Т), и J -I
(9)
рекодирующий блок 15.
ту t + Т будут вычислены проекции
X. и У- в цифровом виде. Дгшьнейшая
обработка идет в групповом виде на Перекодирующий блок 75 решает две
элементах цифровой техники. задачи: вычисляет дополнительные наВыход каждого активного фильтра 1 Ьег фазыДЦ .. ; определяет по величине и 2 через первый и второй коммута- ° u.jинформационные разряды 1е, при
этом для однократной относительной фа-, зовой модуляции (ООФМ), двухкратной относительной фазовой модуляции
торы 5 и 6 последовательно подключается к блоку 7 вычисления разности фаз.
(ДОФМ) и трехкратной относительной
числительньш блок 11 определения ар- 35 фазовой модуляции (ТОФМ) значения
Проекции X; и у. поступают на вы1J 14
гумента вектора ООФМ
а 41..и 1е определяютс
1е 000
ДОФМ
ТОФМ.. f,;
.. , если О i а Ч ij 90 f. .-360° , если 270 Л.У,7 360 4V..-180°, если .K270 , le « 111
о
if.. , если О 6 А Ч , «- 45 .|
4Ч ..-360°, если 315 /дЧ 360° °°° uS ij-SO , если 45° 135° 1е 010 uf j-ieO, если 135 дЧ.. 225° 1е - 111 ..-270°, если 225% л Ч с 315 1е 001
Atij , если о лЧ .. i 225° 4Ч.,.-360 , если 337,5 Ч 61 4360°
вЧ .-А5 , если 67,5 1е - 000 ЛЧ ;.-90 , если 67,5%ЛЧ;. 112,5° 1е - 010 ЬЧ1;-135 , если 112, 157,5° le - 110 U4.-180 , если 157, 202,5 le « 1 tO , если 202, 247,5 le - Oil 6V--270 , если 247, .297,5°Ie « 001 л ,,-315 , если 297,5°f&4,j 337,5 le « 101
le
100
6
y-.j
arctg rr
Л - .
и
На выходе получаются значения угла Ч .. , для определенности будем считать, его девятиразрядным, это поз- воляет иметь погрешность не превышающую 0,7 . Значения Ч-.С - номер подканала, 3 - номер (дополнительного) активного фильтра 2 или номер такто- . вого интервала) поступают на запоминающий блок 12, в котором они хранятся в течение посылки Т .
Задержанные на посылку значения
рая поступает (9 разрядов) на
ЛЧ.. . -Ч-.. (Т), и J -I
(9)
рекодирующий блок 15.
а 41..и 1е определяются как
1е 000
11
(10)
(11)
le
100
(12)
71277423
формированияй Ч-. ясен из- необходимо лишь учесть: вес разряда - 180, вес седьмого 90 и т.д.; вес младшего
зна
ну ным
360
0,703°. Сигнал ТОФМ
разряда
равен логической 1, когда демодулятор принимает сигналы трехкратной относительной фазовой модуляции, иначе он равен логическому О. Сигнал ООФМ равен логической 1, когда демодулятор принимает сигналы однократной относительной модуляции,иначе он равен логическому О. В постоянный запоминающий блок 41 записан код 1е в соответствии с выражениями (10), (11), (12).
Физический вес величины л Ч-- заключается в следующем.
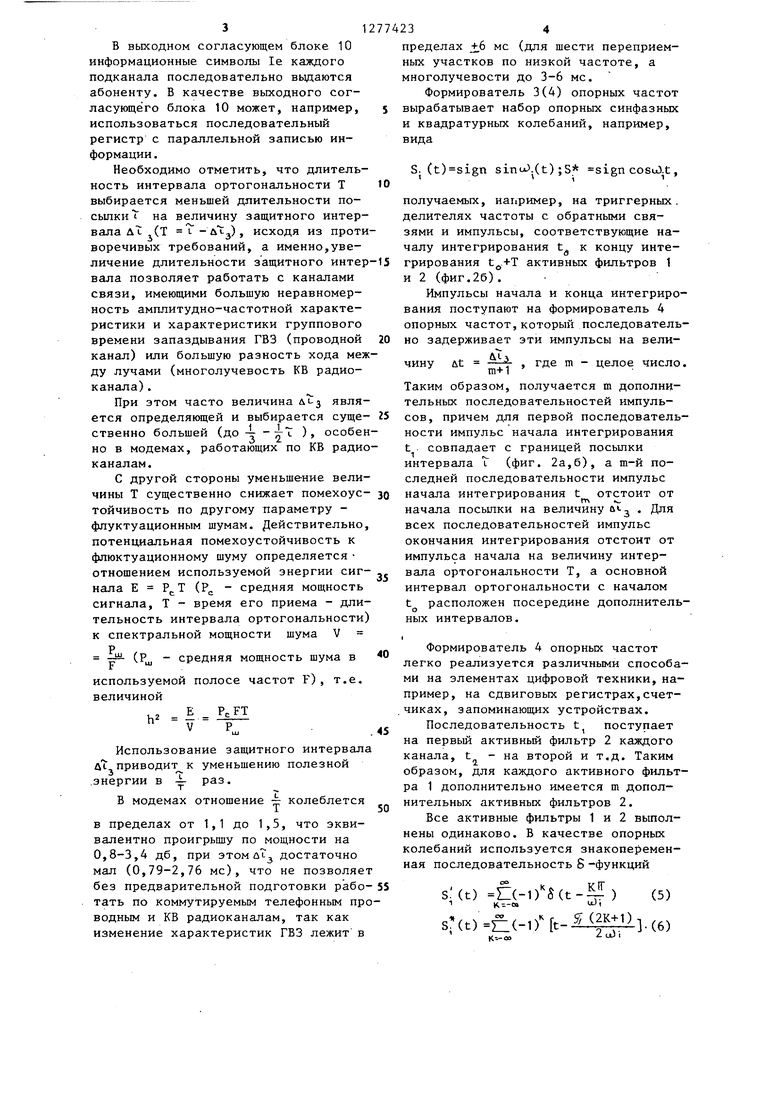
Для простоты рассмотрим случай работы с ДОФМ. На передаче сдвиг фаз между посылками А Ч может принимать значения О,-,7 , (фиг. 5) .Пусть в канале связи искажения достаточно малы и к моменту t переходные процессы закончились. В этом случае активными фильтрами 1 демодулятора будут фиксироваться те же значения u -f , что и на передаче.
По мере приближения начала интегри рования к границе посыпки на сигнал, поступающий на дополнительные активные фильтры, будет накладываться напряжение помехи и (фиг. 5), обусловленное переходными явлениями из-за ограниченности амплитудно-частотной характеристики; нелинейности характе- ристики группового времени запаздывания; явлений многолучевости.
Величина U тем больше, чем ближе начало интегрирования к границе посылки. Наибольшая она для первого дополнительного активного фильтра 2 с началом момента интегрирования t (фиг. 2а,б,в,г,д). Напряжение помехи и, приводит к отклонению фазы принимаемого сигнала от номинальных (эталонных) значений (фиг. 5). Этр отклонение равно величине .. Т. Так как направление вектора помехи U носит случайный характер, то величина-ь Чи тоже случайна. Но необходимо заметит что чем больше модуль помехи U, тем в больших пределах будет изменяться
8
значение ь
Если случайную величину оценить эмпирическим центральным моментом второго порядка как
(&V/t)-m.. (13)
- ii - N
I 1
m
; ,
и (
(14)
где ti - параметр, показывающий, что величина u4ij относится к 1-й посылке. N - число посылок, на которы1
производится оценка параметра S.. и
2
По величине S.. можно судить о степени искажения принимаемого сигнала (величины д.. ). Величина S является состоятельной оценкой дисперсии распределения случайной величины л ... Из приведенной формулы следует, что чем больше разброс величины ,тем
больше S. . tj
Диапазон изменения величины 8Л легко установить. Действительно, минимальное значение S равно нулю,когда U 0. В случае же отсутствия сигнала на приеме, когда принимается один шум, фаза колебаний которого распределена равномерно, определяется как в 0,33331 где 21 - интервал изменения величины . Для разных кратностей модуляции макси- мальное значение S. определяется в соответствии с табл. 1.
Таблица 1
ДОФМ
45
(26)50
ТОФМ
22,5
(13,0)
Наличие искажений, показатели которых определяются величиной S-, может приводить к появлению ошибок в приеме информации. Так, если под
действием сигнала U величина j достигает значений большего чем 45 для случая ДОФМ, то принимаемая информация исказится. Чем больше величина 5Я , тем больше вероятность искажения принимаемой информации,т.е вероятность ошибки. Для каждого подканала величину S.j можно минимизировать, если рассмотреть новую случайную величину вида
IZ:K дч,
ы -
+ к лч.
(15)
где К- и К. - некоторые веса,Здесь имеется в виду векторное сложение величин и ,
Для того, чтобы величина S была 20 учетом приведенной формулы (16)
минимальной, веса К. и К необходимо выбирать обратно пропорционально значениям S.
и
каждое значение S.. можно сопоставит с весовым коэффициентом в соответс вии с табл, 2,
В табл, 2 приведена четыре значения весовых коэффициентов: 1, 0,5, 0,25 и 0. Это позволяет принимать решение о принятой информации по величине ду с учетом сигналов, снимаемых с активных фильтров 1 и 2, работающих в течение всей посылки. При увеличении искажений на краях посылки вклад соответствуюцщх активных фильтров 1 и 2 автоматически уменьшается, а при очень больших искажениях он становится равным нулю.С другой стороны, при малых переходных искажениях все активные фильтры 1 и 2 будут иметь одинаковые веса, зависящие только от уровня белого шума в канале связи. Это эквивалентно увеличению времени приема на величину защитного интервала до величины длитель кости посылки, что и требуется,.
Блок 6 оценки искажений в двух накапливающих сумматорах 16 и 22 накап..
SZ. ij
(16)
где К - некоторая постоянная.
Удобно для реализации веса К. брать кратными степени 2. Наибольший вес берут равным единице, при этом с этим весом берут величины дЧ-j и лч- которые имеют центральный момент 2 -го порядка такой, при котором вероятность ошибки не превьш1ает некоей Так как для случая
величины Р
-5 °
Р Ю МОЖНО рассчитать максимальные з 1ачения S. / S. кратностей модуляции
для разных
ООФМ - 4
ДОФМ - S.5 10°
ТОФМ - S . 20
каждое значение S.. можно сопоставить с весовым коэффициентом в соответствии с табл, 2,
Таблица 2
ливает сумму в соответствии с выражением (14) и соответственно сумму
AV, 4iZ(u4.)
N
(17)
Легко показать, раскрыв выражение (13), что
S2. -т . +A2. . . U и и
(18)
Деление на N накопленных сумм реализуется тем, что для дальнейших преобразований берутся старшие разряды без шести младших. Таким образом, восемь старших разрядов, соответствующих величине подаются на постоянный запоминающий блок 20, где записан код величины , а с него на вход сумматора 21, а кодером подаются 16 старших разрядов с регистра 23,т.е. величина . На выходе сумматора 21 получается значение S,j , которое
поступает на кодер, представляющее .
собой набор пороговых схем.
5
В кодере значение S.. в зависимост
t J
от режима работы масштабируется сдвиговым регистром 25. В режиме ТОФМ поступает на элементы 26-28 сравнения без изменения, а режиме ДОФМ - сдвигается на 2 разряда, в режиме ООФМ - на 4 разряда. Это позволяет для всех режимов с учетом табл. 2 использовать одни и те же коды порогов. В этом случае коды порогов будут: порог 1 00110010; порог 2 01100101; порог 3 11001010.
На элементах И 29-32 собрана ко- дирующая схема, которая в соответствии с табл. 2 кодирует веса К- ,как это указано в табл. 3.
Таблица 3
I
К1
К2
Блок 9 весового суммирования в соответствии с (15) производит векторное сложение величинам - и аЧ .Для этого отдельно суммируются синфазные и квадратурные составляющие X.. и Х- , У.. и У .
X. 1
У
. у,.
i
(19) (20)
Г к X + к X
Таким образом, блок 9 весового суммирования представляет собой накапливающий сумматор, в котором слагаемые перед сложением масштабируются в соответствии с полученными блоком 8 оценки искажений весами К- .
О
У;
Значения Х и X., и У поступают с второго коммутатора 6 демодулятора на коммутатор 33 блока 9 весового суммирования, где поочередно коммутируются на сдвиговом регистре 34. Сдвиговый регистр 34 представляет собой четырехвходовый коммутатор, на первый вход которого входные величины подаются напрямую, на второй вход - с сдвигом на 1 разряд вправо (т.е. как бы уменьшены в два раза), на третий вход - со сдвигом на два разряда
5
0
5
0
5
0
5
0
5
вправо, на четвертый вход подаются нули. На управляющие входы подаются веса К так, что при комбинации 00 выход сдвигового регистра 34 соединяется с первым входом, при комбинации- 10 - с вторым: и т.д. Таким образом, на А-входе сумматора 35 будут произведения входных величин с весами К j . Очевидно, что временные режимы работы блока оценки искажений и блока 9 весового суммирования выбираются так, что каждому i-му значению входных величин X.. и У-- по времени соответствует К..значение веса.
В результате накопления по формулам (19) и (20) в конце посылки в запоминающем блоке 37 получается набор tio числу каналов значений Х . и , которые считьшаются в статические регистры 38 и 39 и поступают через коммутатор 6 на блок 7 вычисления разности фаз. Он используется аналогично второй раз для значений Xj и У;.
На выкоде перекодирующего блока 15 в соответствии с выражениями (10), (11), (12) получаются информационные разряды 1е, которые являются следствием анализа сигнала на всей посылке. Эти разряды поступают на выходной согласующий блок 10, задача которого преобразовать параллельный код полученных информационных разрядов в последовательный, что легко реализуется на регистре сдвига с параллельной записью информации.
Формула изобретения
Демодулятор взаимоортогональных синусоидальных сигналов с фазоразно- стной модуляцией, содержащий блок вычисления разности фаз, первый выход которого соединен с входом выходного согласующего блока, первые и вторые активные фильтры, опорные входы которых подключены к первому выходу первого формирователя опорных частот, второй выход которого соединен с установочными входами первых активных фильтров, сигнальные входы которых объединены с сигнальными входами вторых активных фильтров и являются сигнальным входом демодулятора, выходом которого является выход выходного согласующего блока, отличающийся тем, что, с целью повышения помехоустойчивости, в него введены первый и второй коммутаторы, блок оценки искажений, блок
суммирования и второй формирователь опорных частит, выход которого соединен с установочными входами вторых активных фильтров, выходы которых подключены к п ервым входам первого коммутатора, выходы которого соединены с первыми входами второго коммутатора, выходы которого подключены к перйым входам блока суммирования и к входам блока вычисления разности фаз,
второй выход которого соединен через блок оценки искажений с вторым входом блока суммирования, выходы которого подключены к вторым входам второго коммутатора, при этом вход второго формирователя опорных частот подключен к установочным входам первых активных фильтров, вькоды которых соединены с вторыми входами первого коммутатора.
Гт
Cpu&Z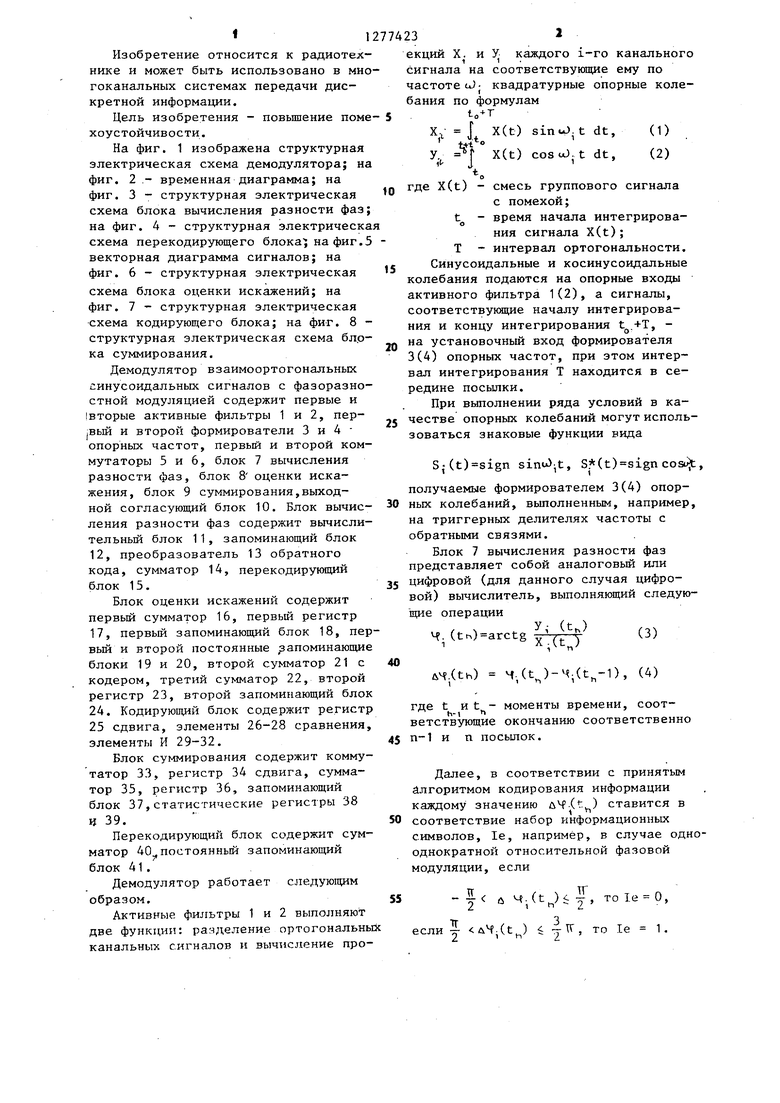



| название | год | авторы | номер документа |
|---|---|---|---|
| Анализатор сигнала тактовой синхронизации | 1990 |
|
SU1781834A2 |
| Многоканальный модем | 1985 |
|
SU1297250A1 |
| УСТРОЙСТВО ДЛЯ ДЕТЕКТИРОВАНИЯ СИГНАЛОВ С ДВУХКРАТНОЙ ОТНОСИТЕЛЬНОЙ ФАЗОВОЙ МАНИПУЛЯЦИЕЙ | 1991 |
|
RU2007886C1 |
| ПРИЕМНОЕ УСТРОЙСТВО ГИДРОЛОКАТОРА БОКОВОГО ОБЗОРА | 1993 |
|
RU2060516C1 |
| Анализатор сигнала тактовой синхронизации | 1988 |
|
SU1587656A1 |
| СПОСОБ И УСТРОЙСТВО ДЛЯ ПЕРЕДАЧИ И ПРИЕМА СИГНАЛОВ С ОГРАНИЧЕННЫМ СПЕКТРОМ (ВАРИАНТЫ) | 2004 |
|
RU2265278C1 |
| Устройство для детектирования фазоманипулированных сигналов | 1982 |
|
SU1042203A1 |
| ФОРМИРОВАТЕЛЬ СИГНАЛОВ МНОГОЧАСТОТНОЙ ЧАСТОТНОЙ ТЕЛЕГРАФИИ | 2002 |
|
RU2212110C1 |
| СПОСОБ КОМПРЕССИИ-ДЕКОМПРЕССИИ ДАННЫХ И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2011 |
|
RU2488960C2 |
| Устройство для приема узкополосных телеграфных сигналов | 1987 |
|
SU1587651A1 |

Изобретение относится к радиотехнике и повышает помехоустойчивость. Устройство содержит активные фильтры 1 и 2, формирователи 3 и 4 опорных частот, коммутаторы 5 и 6, блок 7 вычисления разности фаз, блок 8 оценки искажений, блок 9 суммирования,выходной согласукиций блок 10. Блок 7 содержит вычислительный блок, запоминающий блок, преобразователь обратного кода, сумматор, перекодирующий блок. Блок 8 содержит два сумматора, сумматор с кодером, два регистра,два запоминающих блока, два постоянных запоминающих блока, кодирукмций блок содержит регистр сдвига, три злемента сравнения, четыре злемента И. Блок 9 содержит коммутатор, регистр сдвига, сумматор, регистр, запоминакнций блок, два статистических регистра.Перекодирующий блок содержит сумматор, постоянный запоминаюдий блок. Уменьшение интервала интегрирования существенно снижает помехоустойчивость по флукту- ационным шумам. Потенциальная помехоустойчивость к флуктуационному шуму определяется отношением используемой энергии сигнала к спектральной мощности шума. 8 ил. с СЛ
13
/4
15
срие.З
Редактор И. Касарда
Составитель О. Геллер Техред Л. Сердюкова
Заказ 6762/58Тираж 624Подписное
ВНИИПИ Государственного комитета СССР
по делам изобретений и открытий 113035, Москва, Ж-35, Раушская наб., д. 4/5
Производственно-полиграфическое предприятие, г. Ужгород, ул. Проектная, 4
ue7
tpi/f.e
Корректор Л. Пилипенко
| Окунев Ю.Б | |||
| Теория фазоразност- ной модуляции | |||
| М., Связь, 1979, с | |||
| Раздвижной паровозный золотник со скользящими по его скалке поршнями и упорными для них шайбами | 1922 |
|
SU147A1 |
