Изобретение относится к машиностроительной гидравлике и может найти применение в устройствах с цикловым управлением сервомеханизмами, например, силовыми цилиндрами.
Цель изобретения - упрощение конструкции системы управления.
На чертеже прелчставлена принципиальная схема системы управления сервомеханизмами.
Система управления сервомеханизмами содержит линии 1 и 2 нагнетания и слива, силовые цилиндры 3-5 с упорами 6-11, командоаппарат 12 роторного типа, сообщенный с рабочими полостями 13-18 цилиндров 3-5 и конечными выключателями 19-21 и механически связанный с приводом 22 периодического поворота, имеющим двусторонний цилиндр 23 и распределитель 24 для сообщения полостей 25 и 26 двустороннего цилиндра 23 с линиями 1 и 2 нагне- танин и слива.
Система управления снабжена селектором 27, связанным с конечными выключателями 19--21 и распределителем 24.
Селектор 27 выполнен в виде блока цилиндров 28-30 с рабочими полостями 31- 33 и подвижными исполнительными органами 34-36, опертыми на подпружиненный подвижный элемент 37, механически взаимодействующий с органом 38 управления выпускного распределителя 39, причем конеч- ные выключатели 19-21 выполнены в виде трехпозиционных четырехлинейных распределителей 40-42, каждый из которых установлен в линии 43-45 связи цилиндров 28-30 с линиями 1 и 2 нагнетания и слива.
Командоаппарат 12 снабжен дополнитель-35 36 соответствующего цилиндра 28-30 выдным цилиндром 46 привода периодического поворота, полости 47 и 48 которого сообщены через дополнигельный распределитель 49 с линией I нагнетания.
Система управления снабжена также запорным 50 и пусковым 51 распределителями.
Система управления работает следующим образом.
Для включения системы подается сигнал па пусковой распределитель 51. При этом переключается распределитель 24, и полости 25 и 26 двустороннего цилиндра 23 сообщаются с линиями 1 и 2 нагнетания и слива. Привод 22 периодического поворота поворачивается па определенный угол. При этом посредством командоанпарата 12 происходит переключение подачи питания в силовые цилиндры 3-5 в соответствии с заданной программой. Упоры 6-9 и 10, 11 цилиндров 3-5 перемещаются в крайнее положение. В начале хода упоры 6-11 освобождают конечные выключатели 19-21 и при этом четырехлинейные трехпозиционные распре40
45
50
55
винут, показывая эти.м место неисправности.
Формула изобретения
1. Система управления сервомеханизмами, содержащая линии нагнетания и слива, силовые цилиндры с упорами, установленными на щтоках, конечные выключатели, механически взаимодействующие с упорами, командоаппарат роторного типа, сообщенный с рабочими полостями цилиндров и конечными выключателями и механически связанный с приводом периодического поворота, и.меющим двусторонний цилиндр и распределитель для сообщения полостей двустороннего цилиндра с линиями нагнетания и слива, и селектор, связанный с конечными выключателями и распределителем, отличающаяся тем, что, с целью упрощения конструкции, селектор выполнен в виде блока цилиндров с рабочими полостями и подвижными исполнительными органа.ми, опертыми на подпружиненный подвижный элемент, механически взаимодействующий с органом
делители 40-42 устанавливаются в нейтральные положения, сообщая при этом рабочие полости 31-33 цилиндров 28-30 с линией 2 слива. Подвижные исполнительные органы 34-36 цилиндров 28-30 выдвигаются и нажимают на подвижный элемент 37, который, механически воздействуя на орган 38 управления, открывает выпускной распределитель 39. В конце хода упоры 6-11 взаимодействуют с конечными выключателями 19-21 и устанавливают их в положение, при котором рабочие полости 31-33 цилиндров 28-30 сообщаются с линией 1 нагнетания. Когда исполнительный орган 36 последнего из цилиндров 30 убран, выпускной распределитель 39 закрывается с помощью подвижного элемента 37, механически связанного с органом 38 управления.
При невозможности установки в системе конечных выключателей 19-21 и распределителей 40-42 система имеет возможность управления по временной схе.ме за счет управления приводом 22 командоаппа- рата 12 от дополнительного двустороннего цилиндра 46, который управляется дополнительным распределителем 49 по необходимой программе. Для останова системы в любом положении необходимо пусковой распределитель 51 перевести в первоначальное положение. Каждый из цилиндров 28- 30 постоянно связан с соответствующим ему четырехлинейным трехпозиционны.м распределителем 40-42 и выполняет при этом функцию индикатора отказа. В случае обрыва одной из линий 43-45 связи или отказа цилиндра 28-30 исполнительный орган 34винут, показывая эти.м место неисправности.
Формула изобретения
1. Система управления сервомеханизмами, содержащая линии нагнетания и слива, силовые цилиндры с упорами, установленными на щтоках, конечные выключатели, механически взаимодействующие с упорами, командоаппарат роторного типа, сообщенный с рабочими полостями цилиндров и конечными выключателями и механически связанный с приводом периодического поворота, и.меющим двусторонний цилиндр и распределитель для сообщения полостей двустороннего цилиндра с линиями нагнетания и слива, и селектор, связанный с конечными выключателями и распределителем, отличающаяся тем, что, с целью упрощения конструкции, селектор выполнен в виде блока цилиндров с рабочими полостями и подвижными исполнительными органа.ми, опертыми на подпружиненный подвижный элемент, механически взаимодействующий с органом
j12784934
управления выпускного распределителя, при-2. Устройство по п. 1, отличающееся тем
чем конечные выключатели выполнены в ви-что командоаппарат снабжен дополнительде трехпозиционных четырехлинейных рас-ным двусторонним цилиндром привода пепределителей, каждый из которых установ-риодического поворота, полости которого
лен в линии связи рабочей полости одногосообщены через дополнительный распредецилиндра с линиями нагнетания и слива.литель с линией нагнетания.
| название | год | авторы | номер документа |
|---|---|---|---|
| Гидравлический привод синхронного и независимого перемещения исполнительных органов грузовой платформы транспортного средства | 1988 |
|
SU1581620A1 |
| Гидропривод | 1990 |
|
SU1809180A1 |
| Гидрообъемный привод ходовой части транспортного средства | 1985 |
|
SU1303446A1 |
| Гидропривод виброплощадки | 1982 |
|
SU1038234A1 |
| Машина для мойки дорожных покрытий | 1987 |
|
SU1495407A1 |
| Гидроприводной возвратно-поступательный насос | 1982 |
|
SU1084484A1 |
| Гидропривод | 1989 |
|
SU1701995A1 |
| ГИДРОПРИВОДНОЙ СИЛОВОЙ АГРЕГАТ ДЛЯ УСТАНОВОК ВОДОСТРУЙНОЙ РЕЗКИ | 2009 |
|
RU2415309C1 |
| Устройство для подъема крупногабаритных грузов | 1983 |
|
SU1194832A1 |
| ТЯГОВО-ТРАНСПОРТНОЕ СРЕДСТВО | 2002 |
|
RU2232685C1 |
Изобретение может быть использовано в устройствах с цикловым управлением сервомеханизмами. Цель изобретения - упростить конструкцию системы. Для этого селектор, связанный с конечными выключателями (КБ) и распределителем (Р), выполнен в виде блока цилиндров 28-30 с подвижными исполнительными органами (НО) 34-36. ИО оперты на подпружиненный подвижный элемент 37, механически взаимодействующий с органом 38 управления выпускного Р 39. KB 19-21 выполнены в виде трехпозиционных четырехлинейных Р 40-42 установленных в линиях 43-45 связи рабочих полостей силовых цилиндров 3-5 с линиями 1 и 2 нагнетания и слива. При взаимодействии упоров силовых цилиндров 3- 5 с KB последние сообщают полости цилиндров 28-30 .с линиями 1 или 2. ИО 34-36 цилиндров, взаимодействуя с элементом 37, переключают Р 39. Система может также управляться по временной схеме. Для этого командоаппарат 12 снабжают двухсторонним цилиндром 46 привода периодического поворота. 1 з.п. ф-лы, 1 ил. (Л 23 27 ГчЭ оо 4i СО оо f so i,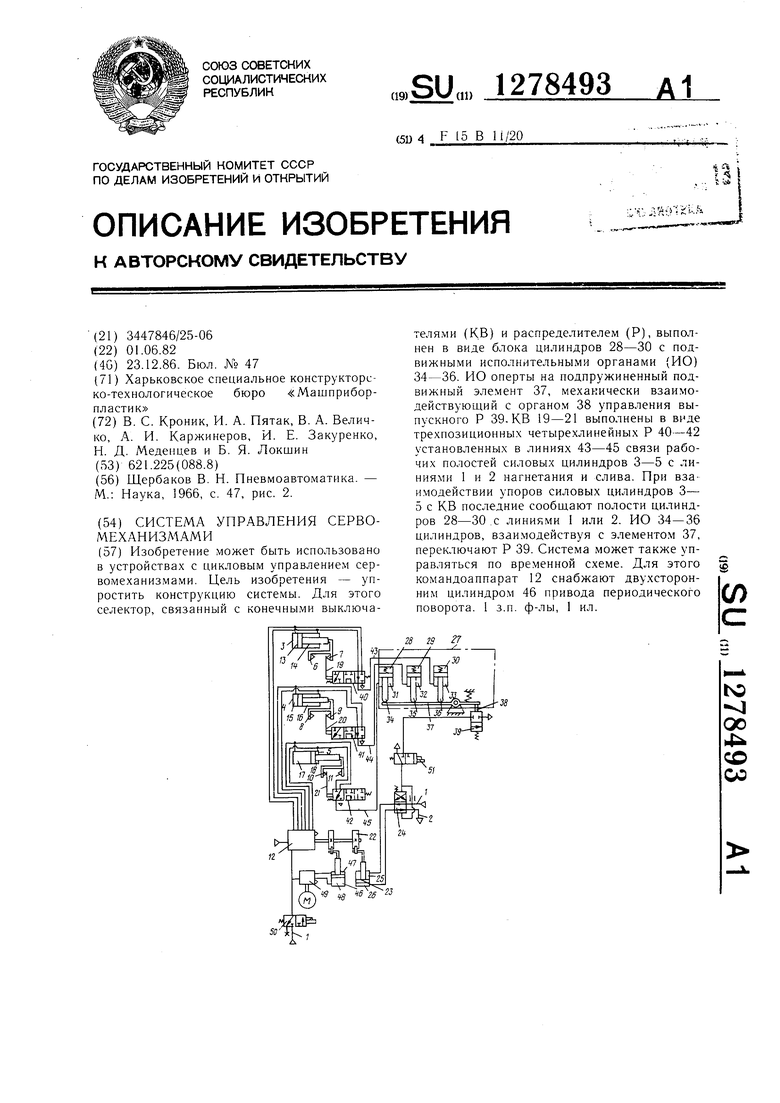
| Щербаков В | |||
| Н | |||
| Пневмоавтоматика | |||
| - М.: Наука, 1966, с | |||
| Способ очищения сернокислого глинозема от железа | 1920 |
|
SU47A1 |
| Аппарат для очищения воды при помощи химических реактивов | 1917 |
|
SU2A1 |
