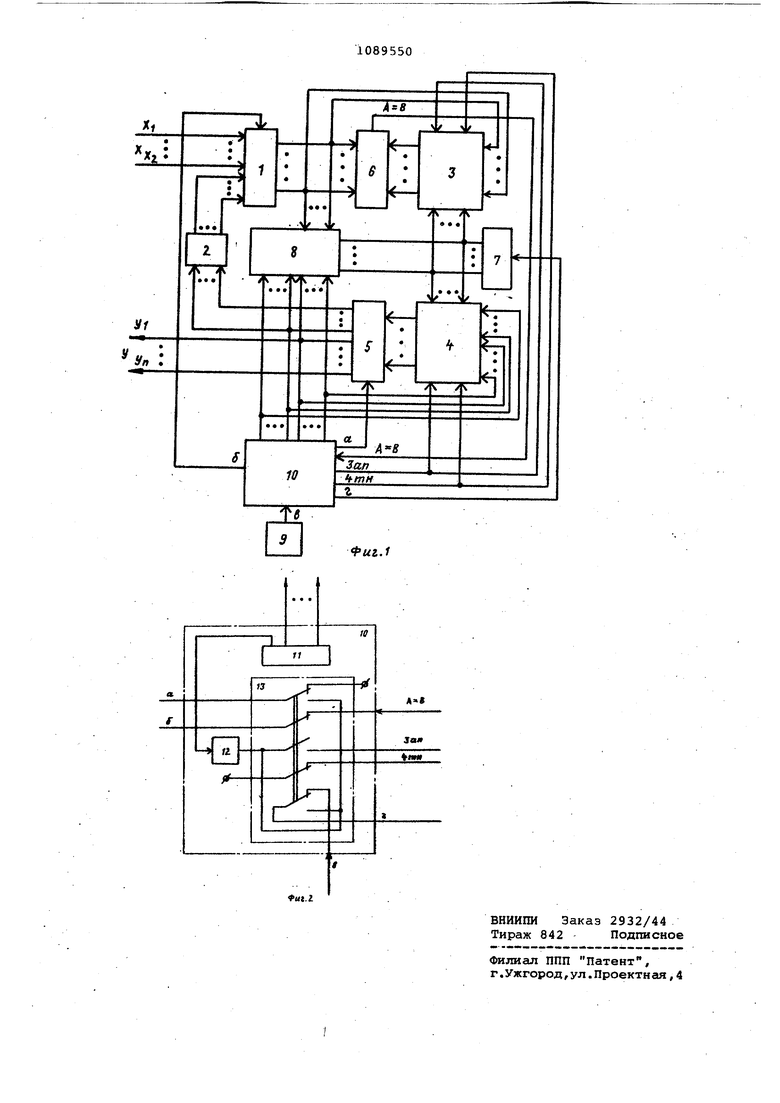
Изобретение относится к системам автоматического управления и может 1быть использовано для управления дц кретньми технологическими процессами, в частности промышленными роботами, манипуляторами, а также подъемно-транспортнБМи, складскими и др гими дискретными технологическими объектами. Известно устройство управления технологическими процессами, содержащее блок памяти ситуаций в виде устройства памяти гипотез и регистр ситуаций в виде устройства памяти команд, которое позволяет осуществлять управление объектами, характе ризуемыми условно-вероятностными за висимостями между входными ситуациями, состоянием объекта и командами управлени я С13. Однако известное устройство имее ограниченные функциональные возможности HL области применения. Наиболее близким техническим реш нием к изобретению является устройство, содержашее регистр ситуаций, подключенный информационными входам к выходам датчиков состояний, выход ми к информационным входам первого блока памяти, а вторыми и третьими входами соответственно к выходам де шифратора и блока задержки, подключенного входом к управляющему входу второго блока задержки, связанного информационными входами и выходами с соответствующими вторьми входами и, выходами первого блока памяти С2 Недостатком такого устройства явл ется необходимость изменения его структуры (перекоммутации диодных матриц) при изменении алгоритма функ ционирования объекта управления. В тех случаях, когда необходимы частые изменения алгоритма функционирования устройства для дискретного управления, устройство не может быть исполь зовано . Цель изобретения - расширение функциональных возможностей путем реализации устройством различных управляюших воздействий без изменения его структуры. Поставленная цель достигается тем что в устройство для дискретного управления, содержашее первый регистр подключенный первьми информационными входами к входу устройства,-а вторыми информационными входами - к выходу блока временных интервалов, первый и второй блоки памяти, введены счетчик адреса, второй регистр, блок сравнения, блок управления, индикатор и генератор импульсов, подключен ный выходом к первому входу блока управления, соединенного первым и вторым входами с управляюшими входами соответственно первого и второго регистров, третьими выходами - с первыми входами блока индикации, входами блока временных интервалов, первыми выходами второго регистра и первыми информационными входами второго блока памяти, а четвертыми выходами - с вторыми входами блока индикации, вторыми выходами второго регистра и вторыми информационными входами второго блока памяти, под1 ключенного первым и вторым управляю-у шими входами соответственно к перво му и второму управляющим входам пер вого блока памяти и к пятому и шестому выходам блока управления, связанного седьмым выходом со счетным входом счетчика адресов, подключенного выходами каждого разряда к соответствующим адресным входам первого и второго блоков памяти и к уретьим входам блока индикации,соединенного четвертыми входами с выходами первого регистра, с первыми вхоДами блока сравнения и с информационными входами первого блока памяти, подключенного выходами к вторым входам блока сравнения, связанного выходом с вторым входом блока управления, На фиг. 1 показана блок-схема устройства; на фиг. 2 - схема блока управления. Устройство содержит первый регистр 1 блока 2 временных интервалов, первый блок 3 памяти, второй блок 4 памяти, второй регистр 5, блок 6 сравнения, счетчик 7 адресов, блок 8 индикации, генератор 9 импульсов, блок 10 управления. Блок 10 управления содержит клавиатуру 11, формирователь 12 импульсов и переключатель 13. Принцип работы устройства основан на распозновании состояний (в дальнейшем - ситуаций), выдаваемых датчиками объекта управления (сигналы и выдачи устройством команд (сигналы У), соответствующих сложившейся ситуации и предназначенных для включения или выключения соответствующих исполнительных механизмов, элементов времени, счетчиков и т.д. Привязка устройства к конкретному объекту и вводу соответствующего данному объекту алгоритма управления заключается в подключении входов К устройства к выходам датчиков, а выходов У - к исполнительным органам объектауправления с последующей одноразовой имитацией технологического цикла с помощью блока 10 управления. В процессе этой имитации в блок 3 памяти (ситуаций) автоматически будут занесены коды всевозможных технологических ситуаций, а в блок памяти 4 - соответствующие каждой ситуации коды команд управления. Кроме того, алгоритм функционирования предлагаемого устройства в каждом конкретном случае может быть
задан по .---; гс станленной временной диаграмме у)Д -гы объекта управления путем ее последовательного набора и ввода в устройство с клавиатуры блока 10 управления, количество разрядов первого блока 3 памяти равно количеству разрядов регистра 1, а второго блока 4 памяти количеству исполнительных механизмов объекта управления.
Устройство работает следующим образом.
Сигналы X с датчиков объекта управления, сигналы блока 2 временных интервалов в виде ; комбинаций едиLниц и нулей (кода ситуации) поступают на входы регистра 1, а с выхода последнего - на первые -бходы блока 6 сравнения. На вторые входы блока б сравнения на заданной частоте параллельно-последовательно поступают оды ситуаций, записанные в ячейки блока 3 памяти (ситуаций). Одновременно на входы регистра 5 (команд управлег ния) из блока 4 памяти (команд управления) поступают коды команд. Каждому коду ситуации, записанному в ячейку блока 3 памяти (ситуаций), пи такому же адресу в блоке 4 памяти (команды управления) записан соответствующий код команды включения и выключения исполнительных механизмов, элементов времени и т.д. Блок 3 памяти и блок 4 памяти выдают соответственно код ситуации и код команды . (соответствующий данной ситуации) синхронно при помощи счетчика 7 адресов, который в автоматическом режиме переключается импульсами генератора импульсов через блок 10 управления, при этом после переключения адреса блоков памяти 3 и 4 на входы последних с блока управления 10 поступает импульс, которым считывается содержимое ячеек обоих блоков памяти. При совпадении кодов ситуаций поступивших на входы блока 6 сравнения со стороны регистра 1 и блока 3 памяти, на выходе блока б сравнения появляется импульс, которым через блок 10 управления в регистр 5 (команд управления) записывается код
КОМа-НДЫ, ПОСТУПИЕПГИЙ в ДЛННЫЛ МОМ(ИТ
на его входы. Этим кодом включаются и и выключаются исполнительные механизмы объекта управления, а также элементы блока 2 временных интервалов, задающие необходимые временные задержки. Таким образом, при каждом изменении кода ситуации, поступающего .на входы регистра 1 ситуации , в регистр 5 (команд управления) записывается новая команда управления объектом. Отг аботка исполнительными механизмами заданного цикла заканчивается появлением на входах регистра 1 (ситуаций) новой комбинации сигналов X, которая, в свою очередь, вызывает появление на выходах регистра 5 (команд управления) новой комбинации сигналов V, включающих и выключающих соответствующие исполнительные ме:й.анйзмы и т.д.
Ввод и запоминание устройством программы управления осупцествляется в-режиме ручного управления. По показаниям блока 8 индикации при помощи клавиатуры 11 набираются адрес, код ситуации и код команды, затем сигналом с блока 10 управления осуществляется запись кодов.в блоки 3 и 4 памяти. Корректировка управляющих воздействий на ©бъект управления может осуществляться.в процессе управления, что позволяет оперативно изменять программу управления объектом Т.е. оперативно переориентировать управляющее устройство на выполнение операций управления по измененному алгоритму.
Преимуществом устройства является отсутствие необходимости разработки программного обеспечения, стоимость и сложность которого превосходят эти показатели самой аппаратуры.
Предлагаемое устройство обеспечивет возможность оперативного изменени управляющего алгоритма без изменения ,его структуры, причем исключается и необходимость программного обеспечения. Кроме того, устройство позволяет осуществлять ввод управля1аиего алгоритма путем однсэразовой имитации работы объекта упра-вления.
Xt
Ui,1

| название | год | авторы | номер документа |
|---|---|---|---|
| Устройство для дискретного управления | 1983 |
|
SU1187150A2 |
| Устройство программного управления роботами гальванической линии | 1983 |
|
SU1124250A1 |
| Устройство для обучения операторов | 1987 |
|
SU1492367A1 |
| Устройство для временного программного управления | 1985 |
|
SU1290259A1 |
| УСТРОЙСТВО ОБЕСПЕЧЕНИЯ БЕЗОПАСНОСТИ ТЕХНОЛОГИЧЕСКИХ ПРОЦЕССОВ | 2012 |
|
RU2536368C2 |
| Устройство многоцелевого управления | 1990 |
|
SU1751712A1 |
| Устройство для тестового контроля больших интегральных схем | 1984 |
|
SU1218390A1 |
| УСТРОЙСТВО ДЛЯ СИТУАЦИОННОГО УПРАВЛЕНИЯ | 1991 |
|
RU2102788C1 |
| УСТРОЙСТВО ДЛЯ УПРАВЛЕНИЯ РОБОТОМ - МАНИПУЛЯТОРОМ | 1989 |
|
RU2044619C1 |
| Система автоматического управления процессом крашения | 1987 |
|
SU1527344A1 |
УСТРОЙСТВО ДЛЯ ДИСКРЕТНОГО УПРАВЛЕНИЯ, содержащее первый регистр, подключенный первыми информационными входами к входу устройства, а вторыми информационными входами - к выходу блока временных интервалов, первый и второй блоки.памяти, отличаю.щ е е с я тем, что, с целью расширения функциональных возможностей путем реализации устройством различных управляквдих воздействий без изменения его структуры, в него эведены счетчик адреса, второй регистр, блок сравнения, блок управления/ индикатор и генератор импульсов, подключенный выходом к первому входу блока управления, соединенного первым и вторым выходами с управляющими входами соответственно первого и второго регистров, третьими выxoдa 4H с nepBHNJH входами блока индикации, с входами блока временных интервалов, с первыми выходами регистра и с первыми информациониьми входами второго блока памяти, а четвертыми выходами - с вторыми входами блока индикации, с вторымивыходами второго регистра и с вторыми информационными входами второго блока памяти, подключенного первьм и вторым управляющими входами соответственно к первому и второму управляющим входам первого блока памяти и к пятому и шестс у выходам блоСП ка управления, связанного седьмым выходом со счетным входом счетчика :адресов, подключенного выходами кажг дого разряда к соответствующим адресным входам первого и второго блоков памяти к к третьим входам блока индикации,, соединенного четве{ ть1ми входами с выходами первого регистра, с первыми входа.ми блока сравнения и эр х I с информационнь.и входами первого I блока памяти, подключенного выходами к вторым входам блока сравнения, свяел сд занного выходом с вторым входом блока управления..
| Печь для непрерывного получения сернистого натрия | 1921 |
|
SU1A1 |
| Стохастическая система управления | 1972 |
|
SU562795A1 |
| Кипятильник для воды | 1921 |
|
SU5A1 |
| Аппарат для очищения воды при помощи химических реактивов | 1917 |
|
SU2A1 |
| Устройство для автоматического управления штабелером по заданной программе | 1972 |
|
SU581456A1 |
| Кипятильник для воды | 1921 |
|
SU5A1 |
