,
Изобретение относится к автоматическому управлению и регулированию и может быть использовано ,цля построения систем управления объектами, динамика которых описывается мо- делью
y(t) k(t). W(t - Г) (1) Т k(t) + k(t) aU(t).f (t), (2) где y(t) - выходная переменная
объекта регулирования в t-й момент времени , WCt-t) - внешнее координатное
воздействие ,
k(t) - коэффициент передачи. Тих - постоянные времени , U(t) - параметрическое регулирующее воздействие , P(t) - приведенное параметрическое возмущение с нестационарными свойствами i
а ,- постоянный коэффициент Регулирование осуществляют с целью обеспечения инвариантности коэффициента передачи, от параметрически возмущений для обеспечения отслеживания выходной переменной динамики внешнего координатного воздействия.
Примером описанного класса объектов служат информационно-измерительные системы, внутренние параметры которых изменяются под влиянием неконтролируемых факторов и могут оперативно и целенаправленно корректироваться, т.е. быть регулируемыми.
Целью изобретения является повышение точности регулирования за сче подавления параметрических 1зозмуще- ний.
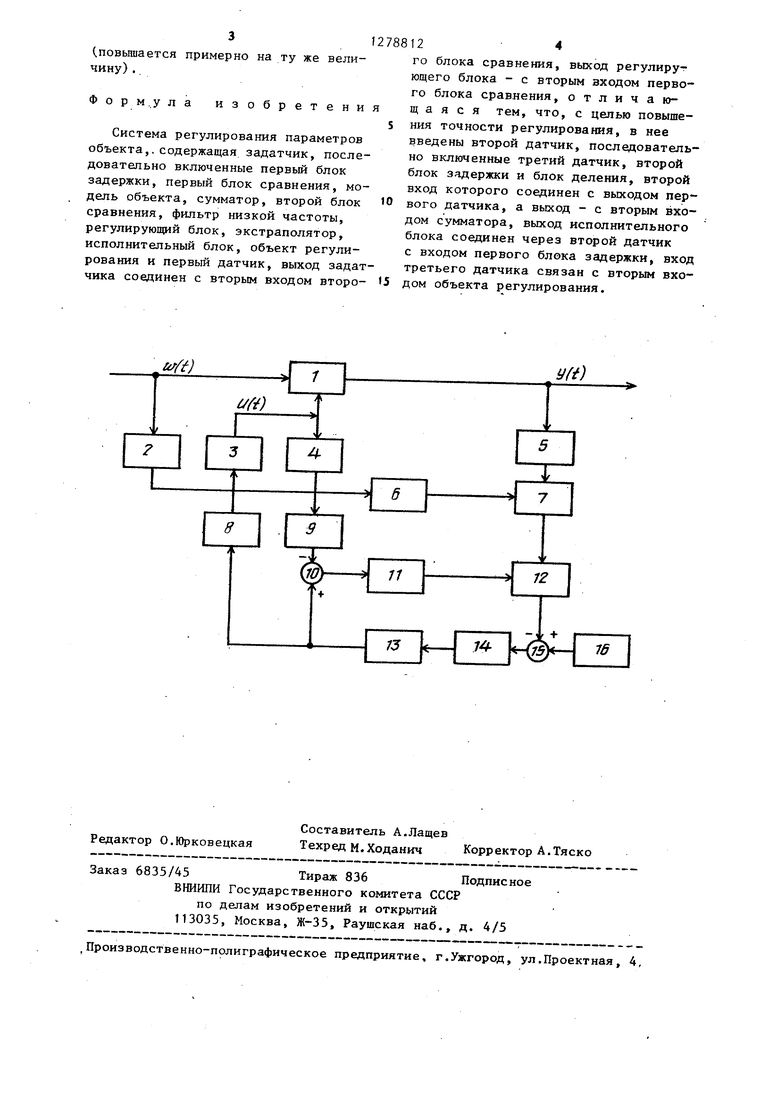
На чертеже приведена блок-схема системы регулирования параметров объекта.
Система содержит объект 1 регулирования, третий датчик 2, исполнительный блок 3, второй датчик 4, первый датчик 5, второй блок 6 задержки, блок 7 деления, экстраполя- тор 8, первьй блок 9 задержки, пер- вьш блок 10 сравнения, модель 11 объекта, сумматор 12, регулирующий блок 13, фильтр 14 низкой частоты, второй блок 15 сравнения и задат- чик 16.
Регулирующий блок 13 функционирует в соответствии, например, с пропорционально-интегральным законо регулирования.
Система работает следующим образом.
Измеряемьй третьим датчиком 2 сигнал о внешнем координатном воз- , действии задержива€ тся во втором блоке 6 задержки на время Т и поступает на первый вход блока 7 деления, на второй вход которого идет сигнал об измеренном первым датчиком 5 значении выходной переменной у. Выходной сигнал блока 7 деления
)
(3)
об оценке коэффициента k на момент времени (t -Т) алгебраически суммируется с выходным сигналом модели 11 объекта по каналу параметрическое регулирующее воздействие - изменение коэффициента передачи, и в результате получается выходной сигнал k (t - ) модельного контура регулирования.
Во втором блоке 15 сравнения сигнал
, м,- - ok (, t - (, ; вычитается из сигнала
о его заданном значении, поступающего с выхода задатчика 16, сигнал о полученной ошибке регулирования проходит через фильтр 14 низкой частоты, где подавляются высокочастотные измерительные помехи, на вход регулирующего блока 13 с пропорционально-интегральным законом регули-- рования. Последний вырабатывает образцовое параметрическое регулирующее воздействие U (t на момент времени (t -Т). Для выработки регу- лирующего воздействия на текущий момент времени сигнал о U (t- iT) экстраполируется экстраполятором 8 на
время Т и подается в исполнительный блок 3 для реализации. Сигнал второго датчика 4 об измеренном значении реализованного параметрического регулирующего воздействия U(t) задерживается в первом блоке 9 задержки на время и вьиитается в первом блоке 10 сравнения из сигнала об и (t-T). Сигнал о полученной разности преобразуется в модели 11 объекта
в сигнал о приращении коэффициента, и, так им образом, получается замкнутый контур модельного регулирования.
В системе регулироваз-шя параметров объекта оценивается и стабилизируется значение коэффициента передачи объекта, что ведет к значительному увеличению точности регулирования
(.повышается примерно на ту же величину) .
Форм.ула изобретения
Система регулирования параметров объекта,, содержащая задатчик, последовательно включенные первый блок задержки, первый блок сравнения, модель объекта, сумматор, второй блок сравнения, фильтр низкой частоты, регулирующий блок, экстраполятор, исполнительный блок, объект регулирования и первьш датчик, выход задатчика соединен с вторым входом второ- 5 дом объекта регулирования.
Редактор О.Юрковецкая
Составитель А.Лащев
Техред М.ХоданичКорректор А.Тяско
Заказ 6835/45Тираж 836Подписное
ВНИИПИ Государственного комитета СССР
по делам изобретений и открытий 113035, Москва, Ж-35. Раушская наб., д. 4/5
,Производственно-полиграфическое предприятие, г.Ужгород, ул.Проектная, 4,
го блока сравнения, выход регулирут ющего блока - с вторым входом первого блока сравнения, отличающаяся тем, что, с целью повышения точности регулирования, в нее введены второй датчик, последовательно включенные третий датчик, второй блок задержки и блок деления, второй вход которого соединен с выходом пер вого датчика, а выход - с вторым входом сумматора, выход исполнительного блока соединен через второй датчик с входом первого блока задержки, вход третьего датчика связан с вторым вхо
| название | год | авторы | номер документа |
|---|---|---|---|
| СИСТЕМА РЕГУЛИРОВАНИЯ ОБЪЕКТА С РЕЦИКЛОМ | 2014 |
|
RU2542910C1 |
| Система регулирования | 1985 |
|
SU1298711A1 |
| Система автоматического регулирования | 1989 |
|
SU1640672A1 |
| Система регулирования объекта с запаздыванием | 1986 |
|
SU1397875A1 |
| СИСТЕМА РЕГУЛИРОВАНИЯ ОБЪЕКТОВ, НАПРИМЕР, ПРОКАТНОГО ПРОИЗВОДСТВА | 1996 |
|
RU2113003C1 |
| СИСТЕМА РЕГУЛИРОВАНИЯ ОБЪЕКТА С РЕЦИКЛОМ | 2011 |
|
RU2457528C1 |
| Адаптивная система регулирования нелинейного объекта,например,шахтной печи | 1985 |
|
SU1297008A1 |
| Система автоматического регулирования | 1987 |
|
SU1483429A1 |
| ИНТЕЛЛЕКТУАЛЬНАЯ СИСТЕМА РЕГУЛИРОВАНИЯ | 2002 |
|
RU2251721C2 |
| Адаптивная система регулирования объекта с нестационарной характеристикой,например,дуговой сталеплавильной печи | 1983 |
|
SU1068891A1 |
Изобретение относится к автоматическому управлению и позволяет повысить точность регулирования. Система содержит последовательно соединенные второй датчик, первый блок задержки, первый блок сравнения, модель объекта, сумматор, второй блок сравнения, фильтр низкой частоты, регулирующий блок, экстраполятор, исполнительный блок, выход которого подключен к входам объекта регулирования и второго датчика, последовательно соединенные третий датчик, второй блок задержки, блок деления, выход которого подключен к второму входу сумматора, выход объекта регулирования соединен с входом первого датчика, выход которого подключен к блоку деления, выход регулирукнцего блока подключен к второму входу первого блока сравнения, вход третьего датчика соединен с .входом объекта регулирования, вход блока сравнения подключен к задатчику. 1 ил. СО С.
| Регулятор | 1980 |
|
SU855607A1 |
| Кипятильник для воды | 1921 |
|
SU5A1 |
