(54) РЕГУЛЯТОР
| название | год | авторы | номер документа |
|---|---|---|---|
| Адаптивный регулятор | 1984 |
|
SU1149215A1 |
| Регулятор | 1980 |
|
SU907511A1 |
| Устройство для согласования производительности технологических участков | 1982 |
|
SU1100607A1 |
| Система управления | 1985 |
|
SU1285430A1 |
| Регулятор с переменной структурой для объектов с запаздыванием | 1981 |
|
SU1004970A1 |
| Система регулирования | 1985 |
|
SU1298711A1 |
| Система управления объектом с запаздыванием | 1984 |
|
SU1200241A1 |
| Прогнозирующий регулятор с переменной структурой | 1981 |
|
SU980068A1 |
| СИСТЕМА АВТОМАТИЧЕСКОГО УПРАВЛЕНИЯ | 1994 |
|
RU2128358C1 |
| Адаптивная система регулирования нелинейного объекта,например,шахтной печи | 1985 |
|
SU1297008A1 |
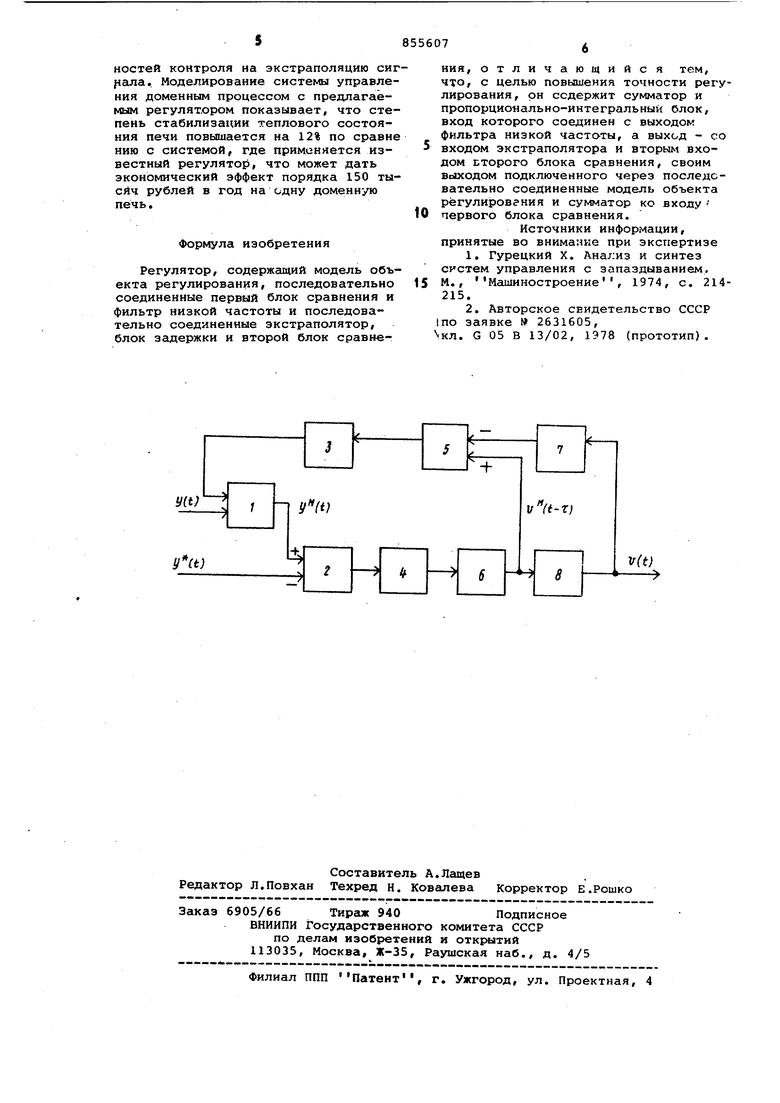
Изобретение относится к автоматическому управлению и регулированию .и может быть использовано для построения систем управления техническиьм объектами, содержащими значительные запаздывания и подверженными влиянию неконтролируемых возмущений. Предполагается, что динамика объекта по каналам регулирования -описывается передаточной функцией . Ие1р-р в которой L(p) и М(р) - полиномы от Р, степень полинома L{p) не превьниает степень полинома М (р) , причем поли ком М(р) выше первого порядка; t время запаздывания. Характеристики внешних воздействий значительно изменяются на интервале времени длительностью Т. Задача управ ления заключается в обеспечении инвариантности регулируемой координаты от внешних сил. Известны регуля тоЕил Смига и Ресвика с косвенным измерением возмущений которые используются для регулирования описанных объектов. В частности, регулятор Ресвика содержит последовательно соединенные первое звено сравнения, обратную модель объекта без запаздывания и второе звено сравнения, а. также звено задержки, вход которого оединен с выходом второго звена сравнения, а выход - со вторым его входом. Такие регуляторы не обеспечивают высокого качества регулирования при действиивысокочастотных помех и наличия ошибок реализации и измерения управлейий {11. Наиболее близким к предлаг-аемому является регулятор, содержащий первое звено сравнения, фильтр низкой частоты включающий третье звено сравнения, усилитель с насыщением и интегратор, обратную модель объекта без запаздывания, в частности, пропорционально-дифференцирующее звено/ второе звено сравнения, экстраполятор и звено задержки. На первый вход первого звена сравнения подается измеряемый сигнал регулируе.мой координаты, на второй вход - заданный сигнал, выход первого звена сравнения подключен к первому входу третьего звена сравнения,, ко второму входу которого подсоединен выход интегратора, на вход которого через усилитель с насыщением подключен выход третьего звена сравнения, выход интегратора соединен также через обратную модель объекта без запаздывания и второе звено сравнения со входом экстраполятора, рыход которого че рез звено защержки подключен ко второ му входу второго звена сравнения и яв ляется выходом регулятора 2. Недостаток известного регулятора заключается в невысокой точности регулирования, которая обусловлена наличием обратной модели объекта без запаздывания. В случае, если модель объекта без запаздывания представлена инерционным звеном первого порядка, что имеет место в известном регу ляторе, достигается достаточная точность преобразования предварительно сглаженного помехозашумленного сигна ла. Если же модель объекта без запаз дывания представлена инерционным зве ном более высокого порядка, то преоб разование даже сглаженного сигнала в обратной модели объекта без запаздывания, содержащей дифференцирующие звенья, приводит к значительным погрешностям. А это, в свою очередь, приводит к понижению точности регули рования. Кроме того, невысокая точность регулирования обусловлена низкой помехозащищенностью регулятора . к ошибкам контроля управляющего воздействия и тяжелым режимом работы экстраполятора, на вход которого поступают через звено задержки высокочастотные Помехи контроля управляющего воздействия. Цель изобретения - повышение точности регулирования. Поставленная цель достигается тем, что в известный регулятор, содержащий модель объекта регулировани последовательно соединённые первый блок сравнения и фильтр низкой часто ты и последовательно соединен 1ые экс траполятор, блок задержки и второй блок сравнения, введены с/мматор и прЬпорционально-интегральный блок, вход которого соединен с выходом фил тра низкой частоты, а выход - со вхо дом экстраполятора и вторым входом второго блока сравнения, своим выходом подключенного через последовател но соединенные модель объекта регули рования и сумматор ко входу первого блока сравнения. Точность регулирования в предлага мом регуляторе повышается за счет то го, что отсутствует обратная модель объекта без запаздывания. Производит ся неявное обращение модели объекта без запаздывания с помощью замкнутого контура, содержащего модель объек та без запаздывания, сумматор, фильтр низкой частоты и пропорционально-интегральный блок. Кроме того, точность регулирования повышается за счет того, что высокочастотные ошибки контроля управляющего воздействия не поступают непосредг ственно на экстраполятор, а сглаживаются моделью объекта без запаздывания На чертеже приведена блок-схема егулятора. Схема регулятора содержит сумматор , первый блок 2 сравнения, модель 3 объекта регулирования, фильтр 4 низкой частоты, второй блок 5 сравнения, пропорционально-интегральный блок б, блок 7 задержки и экстраполятор 8. На чертеже обозначено: У(Ь) - измеряемый выходной сигнал объекта управления (регулируемая координата); y(t) - заданный сигнал (задание на регулируемую координату); V(t) - управляющий сигнал; y(t) - выходной сигнал модельного контура регулирования; V(t-T) - управляющий сигнал модельного контура регулирования. Регулятор работает следующим образом. В сумматоре 1 выходной сигнал объекта управления суммируется с выходным сигналом модели 3 объекта регулирования, в результате получается выходной сигнал (t) модельного контура регулирования. Сигнал y(t) поступает на блок 2 сравнения, где из него вычитается заданный сигнал y(t). Полученный сигнал поступает на фильтр 4 низкой частоты, содержащий, например, последовательно соединенные блок сравнения, усилитель с насыщением и интегратор (на чертеже не указаны), выход которого поступает на второй вход блока сравнения и является выходом фильтра низкой частоты. В фильтре 4 низкой частоты срезаются отдельные большие выбросы и подавляется высокочастотная составляющая сигнала, что повышает точность его дальнейшего преобразования. С выхода фильтра 4 низкой частоты сигнал поступает на пропорционально-интегральный блок 6 (ПИ - регулятор), на выходе которого получается управляющий сигнал v(t-tr) модельного контура регулирования. Сигнал v(t-t) с выхода пропорционально-интегрального блока 6 поступает на экстраполятор 8, в качестве которого используется, например, реальное фиксирующее звено, В экстраполяторе 8. вырабатывается управляющий сигнал V(t), являющийся выходным сигналом регулятора. В то же время сигнал V(t) подается через блок 7 задержки на один вход второго блока сравнения, где он вычитается из сигнала v(t-K} , пришедшего с выхода пропорционально-интегрального блока 6. Полученный сигнал о разности V(t-C) - V(t-T) подается через модель 3 объекта регулирования на один из выходов сумматора и, таким образом, получается замкнутый контур модельного регулирования. Использование предлагаемого регулятора позволяет повысить точность воспроизведения задания за счет неявного обращения модели объекта регулирования и уменьшения влияния погрешностей контроля на экстраполяцию сиг|iauna. Моделирование системы управления доменным процессом с предлагаемым регулятором показывает, что степень стабилизации теплового состояния печи повышается на 12% по сравне нию с системой, где применяется известный регулятор, что может дать экономический эффект порядка 150 тысйч рублей в год на одну доменную печь.
Формула изобретения
Регулятор, содержащий модель объекта регулирования, последовательно соединенные первый блок сравнения и фильтр низкой частоты и последовательно соединенные экстраполятор, блок задержки и второй блок сравнения, отличающийс я тем, что, с целью повышения точности регулирования, он содержит сумматор и пропорционально-интегральный блок, вход которого соединен с выходом фильтра низкой частоты, а выход - со входом экстраполятора и вторым входом Бторого блока сравнения, свонм выходом подключенного через последовательно соединенные модель объекта регулирования и сумматор ко входу
0 первого блока сравнения.
Источники информации, принятые во внимание при экспертизе
М., Машиностроение, 1974, с. 2145215.
кп. G 05 В 13/02, 1978 (прототип).
