Изобретение относится к автоматическому управлению и регулированию и может быть использовано для построения систем управления техническими объектами,содержащими значительные запаздывания и подверженными влиянию неконтролируемых внешних воздействий.
Динамика объекта по каналам регулирования описывается передаточной функцией
ср(р) (p),
где tf0(p) - часть передаточной функции без учета запаздывания, например инерционное звено первого порядка или интегральное звено; время запаздывания, воздействия значительно
лL. -
Внешние
изменяются на интервале времени Ј
Задача управления заключается в обеспечении инвариантности регулируемой координаты от внешних воздействий.
Цель изобретения - повышение точности регулирования.
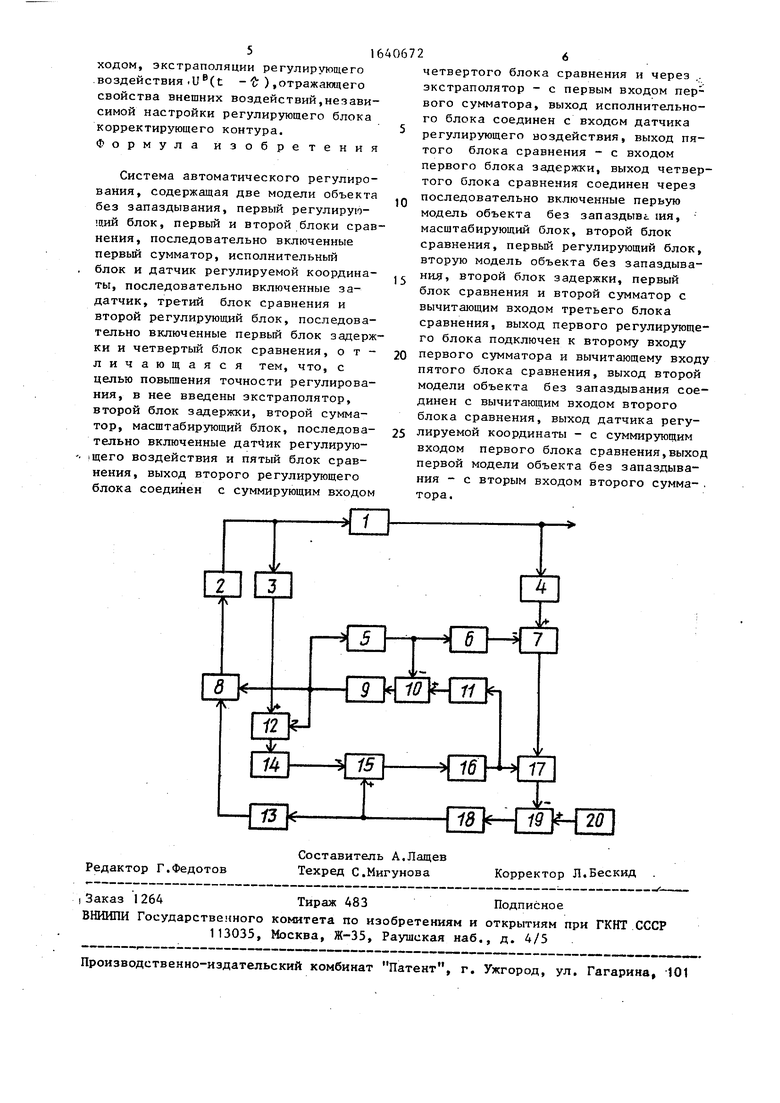
На чертеже изображена блок-схема системы автоматического регулирования.
Система автоматического регулирования содержит подключаемые к объекту 1 регулирования исполнительный блок 2, датчик 3 регулирующего воздействия, датчик 4 регулируемой координаты, а также вторую модель 5 объекта без запаздывания,второй блок 6 задержки, первый блок 7 сравнения, первый сумматор 8, первый регулирующий блок 9, второй блок 10 сравнения, масштабирующий блок 11, пятый блок 12 сравнения, экстраполя- тор 13, первый блок 14 задержки,чето
-U
о о |
N5
вертый блок 15 сравнения, первую модель 16 объекта без запаздывания, второй сумматор 17, второй регулирующий блок 18, третий блок 19 сравнения, задатчик 20.
Работает система автоматического регулирования следующим образом.Основной контур регулирования, включающий блок 14 задержки, блок 15 сравнения, модель 16 объекта регулирования, сумматор 17, задатчик 20,блок 19 сравнения, регулирующий блок 18 и экстраполятор 13, вырабатывает основное регулирующее воздействие, к сигналу о котором в сумматоре 8 алгебраически подсуммируется сигнал о корректирующем регулирующем воздействии, который поступает с регулирующего блока 9 корректирующего контура. Сигнал с сумматора 8 подается на исполнительный блок 2, в котором реализуется регулирующее воздействие на объект 1 регулирования. Выход объекта 1 регулирования измеряется датчиком 4, из выходного сигнала которого в блоке 7 сравнения вычитается сигнал об эффекте корректирующего воздействия, поступающий с блока 6 задержки. Выходной сигнал блока 7 сравнения складывается в сумматоре 17 с выходным сигналом модели 16 объекта без запаздывания и в результате получается сигнал о модельном выходе объекта 1 регулирования.
В основном контуре регулирования сигнал о модельном выходе у (t) объекта вычитается в блоке 19 сравнения из сигнала задатчика 20 о заданном выходе y(t) объекта. Сигнал о полученной разности преобразуется в регулирующем блоке 18, например, с пропорционально-интегральным законом регулирования и получается сигнал об регулирующем воздействии U (t -Ј), где Ј - время запаздывания в объекте 1 регулирования,который экстраполируется на время С экстраполятором 13 и поступает на первый вход первого сумматора.Фактически реализованное регулирующее воздействие измеряется с помощью датчика 3 и полученный сигнал U(t) идет на блок 12 сравнения, где из него вычитается сигнал о корректи- рующем воздействии fl U(t). На выходе блока 12 сравнения получается сих- нал о реализованном регулирующем воздействии основного контура,кото
0
5
0
5
0
5
0
5
0
рый задерживается в блоке 14 задерж-, ки на время С и вычитается в блоке 15 сравнения из сигнала U6(t -Ј). Полученный сигнал Уои(1 -Ј) преобразуется в модели 16 объекта без запаздывания и поступает на второй вход сумматора 17.
Корректирующий контур САР предназначен для того, чтобы приблизить модельный выход объекта к натурному. Для этого корректирующим контуром вырабатывается такое регулирующее воздействие, чтобы выход модели 16 объекта без запаздывания стремился к нулю. С этой целью выходной сигнал модели 16 объекта без запаздывания поступает на масштабирующий блок 11, коэффициент которого выбирают таким образом, чтобы спрогнозировать свободное движение объекта. В частности, для инерционного звена первого порядка этот коэффициент вычис Г/
ляют по выражению е , где Т - постоянная времени, а для интегрального звена равен единице. Выходной сигнал масштабирующего блока 11 поступает на замкнутый контур неявного обращения оператора модели 5 объекта без запаздывания, включающего кроме этой модели регулирующий блок 9 и блок 10 сравнения. В блоке 10 сравнения из выходного сигнала масштабирующего блока 11 вычитается выходной сигнал модели 5 объекта без запаздывания, сигнал о полученной разности преобразуется в регулирующем блоке 9, например, с пропорционально-интегральным законом регулирования, в сигнал U(t) и поступает на модель 5 объекта без запаздывания и на сумматор 3. Чтобы исключить эффект о U(t) из выхода объекта 1 регулирования, выходной сигнал модели 5 объекта без запаздывания задерживается в блоке 6 задержки на время Ј и вычитается в блоке 7 сравнения из сигнала y(t) о выходе объекта 1 регулирования. Тем самым достигается независимость функционирования основного и корректирующего контуров регулирования. Настройку регулирующего блока 9 выбирают в ориентации на вторую модель 5 объекта без запаздывания.
Повышение точности регулирования в САР достигается таким образом за счет сближения модельного выхода объекта регулирования с натурным выРедактор Г.Федотов
Составитель А.Лащев Техред С.Мигунова
70 НЧ 20
Корректор Л.Бескид .
| название | год | авторы | номер документа |
|---|---|---|---|
| СИСТЕМА РЕГУЛИРОВАНИЯ ОБЪЕКТА С РЕЦИКЛОМ | 2011 |
|
RU2457528C1 |
| СИСТЕМА АВТОМАТИЧЕСКОГО УПРАВЛЕНИЯ | 1994 |
|
RU2128358C1 |
| Система управления | 1984 |
|
SU1244636A1 |
| Система регулирования для объектов с запаздыванием | 1985 |
|
SU1295365A1 |
| Система регулирования | 1985 |
|
SU1298711A1 |
| Регулятор | 1980 |
|
SU907511A1 |
| СИСТЕМА РЕГУЛИРОВАНИЯ ОБЪЕКТА С РЕЦИКЛОМ | 2013 |
|
RU2562362C2 |
| Регулятор | 1989 |
|
SU1789969A1 |
| Устройство для согласования производительности технологических участков | 1982 |
|
SU1100607A1 |
| Адаптивный регулятор | 1984 |
|
SU1149215A1 |
Изобретение относится к автоматическому управлению и регулированию и может быть использовано для построения систем управления техническими объектами, содержащими значительные запаздывания и подверженными влиянию неконтролируемых внешних воздействий. Изобретение позволяет повысить точность регулирования. В устройство введены экстраполятор, второй блок задержки, второй сумматор, масштабирующий блок, что позволяет приблизить регулируемый модельный выход к натурному выходу объекта регулирования, прогнозировать оценки внешних воздействий.1 ил. с Ј
| Регулятор | 1980 |
|
SU855607A1 |
| Кипятильник для воды | 1921 |
|
SU5A1 |
| Регулятор с моделью объекта | 1983 |
|
SU1080118A1 |
| Кипятильник для воды | 1921 |
|
SU5A1 |
