а:
00 О1
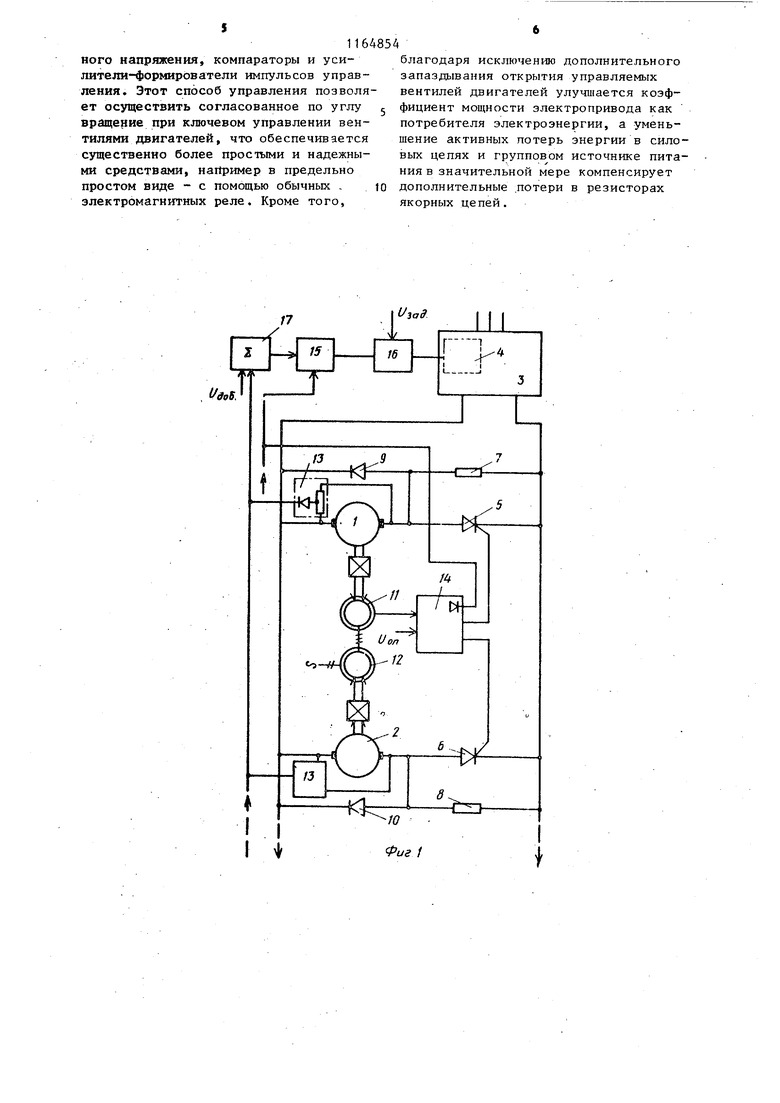
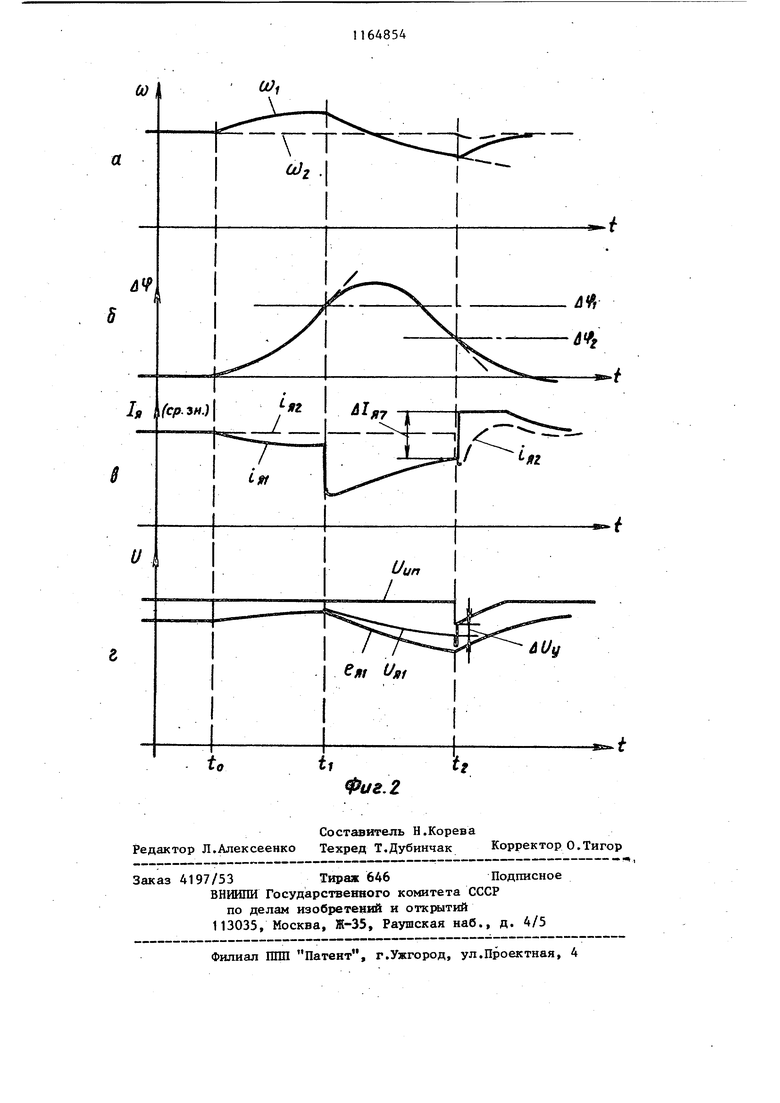
NJ Изобретение относится к электротехнике и может быть использовано для управления широко применяемым в. металлургической и других отраслях промышленности многодвигательным электроприводом постоянного тока с синхронизацией двигателей по углу поворота, содержащим групповой управ ляемый нереверсивньй источник питания, Известен способ управления многодвигательными электроприводом постоянного тока, согласно которому непре рывно измеряют угловое положение валов двигателей, сравнивают между собой измеренные значения и уменьшают вращающий момент опережающего двигателя посредством соответствующего регулятора }. Недостаток данного способа заключается в невысокой надежности изза аппаратурной сложности электропри вода при многодвигательном его испол нении. Наиболее близким к изобретению по технической сущности является . способ управления многодйигательным электроприводом постоянного тока, 3аключаницийся в том, что непрерывно измеряют угловое положение валов дви гателей, сравнивают полученные значе ния между собой и при возникновении углового рассогласования между валами уменьшают ток якоря опережающего двигателя. Это осуществляют с помощью индивидуального управляемого вен тиля путем дополнительного сдвига импульсов управления этим вентилем относительно импульсов управления вентилями источника питания 2j. Недостаток данного способа управления заключается в невысокой надеж ности из-за сложности апаратурной реализации систем дополнительного фазового сдвига импульсов управления вентилями двигателей. Цель изобретения - повышение надежности . Поставленная цель достигается тем, что согласно способу управлени многодвигательным электроприводом постоянного тока, заключакицемуся в тон, что непрерывно измеряют угловое положение валов двигателей, сравнивают полученные значения между собой и при возникновении углового рассог ласования между валами уменьшают то якоря опережакжцего двигателя, определяют момент увеличения углового рассогласования между валами до первого заданного значения и скачком уменьшают ток якоря опережающего двигателя, затем определяют момент уменьшения углового рассогласования между валами до второго заданного значения, измеряют напряжения на якорях двигателей, выделяют из них наименьшее, суммируют его с предварительно заданной уставкой и скачком уменьшают напряжение источника питания до полученной величины, увеличивают скачком напряжение на якоре опережающего двигателя до напряжения источника питания и плавно увеличивают напряжение источника питания до прежнего значения. На фиг. 1 представлена схема многодвигательного электропривода постоянного тока (для простоты показаны только два двигателя), в которой осуществляется предлагаемый способ; на фиг. 2 - временные диаграммы, иллюстрирующие переходные процессы синхронизации двигателей в схеме согласно фиг. 1. I Многодвигательный электропривод постоянного тока содержит двигатели 1 и 2 (фиг, 1), управляемый нереверсивный источник 3 питания с системой импульсно-фазового управления (СИФУ) 4, к шинам постоянного тока которого подключены через управляемые вентили 5, 6 и резисторы 7, 8 якори двигателей 1 и 2, зашунтированные обратными вентилями 9 и 10. С валами двигателей 1 и 2 связаны датчики 11 и 12 углового положения, например сельсины, включенные в трасформаторном режиме, образующие систему измерения углового рассогласования, а к якорям двигателей 1 и 2 подключены датчики 13 напряжений, образукнцие с помощью диодов схему вьщеления нАименьшего из напряжений на двигателях 1 и 2. С фазочувствительным блоком 14 соединен первый вход ключа 15 сброса, выход которого через задатчик 16 интенсивности связан с СИФУ 4, а второй вход - с выходами сумматора 17, первый вход сумматора 17 связан с датчиками 13 напряжений, а второй - с источником добавочного напряжения (не показан). Предлагаемый способ осуществляется следующим образом. В нормальном режиме на шинах постоянного тока управляемого нереверсивного источника 3 питания существу ет напряжение, которое подается на якори двигателей 1 и 2 через открытые управляемые вентили 5 и 6 и свое величиной определяет рабочую скорост вращения двигателей, при этом угловое рассогласование между вала дви гателей 1 и 2 не превышает первого заданного значения Ч,, меньшего пр величине предельно допустимого для приводимого механизма углового рассогласования валов. Пусть, например, в результате слу чайного уменьшения нагрузки на валу двигателя 1 в момент времени t его скорость вращения несколько увеличи лась (фиг. 2а), а ток якоря соответственно уменьшился (фиг. 2в). В свою очередь, возникшая разница в скоростях вращения вызывает в момент време ни Чр появление углового рассогласования 1(фиг. 2б), которое с помощью сельсинов 11 и 12 (фиг. 1) преоб разуется в электрический сигнал угло вого рассогласования, поступающий в фазочувствительный блок 14. С течением времени это рассогласование увеличивается и в момент времени достигает первого заданного значения Л( (фиг. 26) . В этот момент управляемый вентиль 5 (фиг. 1) закрывается, и питание якоря двигателя 1 осуществляется через резистор 7, в результате увеличения сопрот1тления цепи якоря двигателя 1 ток якоря скачком уменьшается (фиг. 2в) , соот ветственно уменьшается вращающий момент и скорость вращения двигателя 1 начинает уменьшаться (фиг. 2а} Через некоторое время после умень шения тока начинает уменьшаться и угловое рассогласование. При уменьшении углового рассогласования до второго заданного значения ( (фиг. 25), что происходит в момент времени i, в фазочувствительном блоке 14 (фиг. 1) формируется короткий импульс, воздействующий на ключ 15 сброса, который скачком снижает напряжение на выходе задатчика 16 интенсивности до величины вьп одного сигнала сумматора 17, которое определяется как сумма наименьшего из двух выходных сигналов датчиков 13 напряжений и добавочного напряжения 1/,5, составляющего примерно 10% от , датчика 13 напряжений. Выход задатчика 16 интенсивности соединен с входом СИФУ 4 таким образом, что напряжение на шинах постоянного тока управляемого нереверсивного источника 3 питания, также уменьшившись скачком, остается примерно на 10% больше напряжения на якоре двигателя 1, в момент времени f это напряжение оказывается наименьшим (фиг.2г). Сразу после сброса напряжения управляемого нереверсивного источника 3 питания (фиг. 1) управляемый вентиль 5 открывается, и напряжение на якоре двигателя 1 увеличивается до напряжения на шинах управляемого нереверсивного источника 3 питания, в цепи якоря двигателя 1 проходит выброс тока лЛ (фиг. 2в), амплитуда которого пропорциональна напряжению ди„ и определяет собой скорость двигателя 1 на завершающем этапе переходного процесса компенсаций углового рассогласования, способствуя сокращению длительности этого переходного процесса. Под действием вступившего в работу задатчика 16 интенсивности (фиг. 1) напря-. жение на шинах постоянного тока управляемого нереверсивного источника 3 питания плавно возрастает до прежнего рабочего значения, причем ток якоря двигателя 1 в интервале восстановления напряжения остается приблизительно постоянным. I В случае, если большей оказывается скорость двигателя 2, аналогичным образом работают элементы 6, 8, 10 и 13. Процессы сброса в момент времени 4 tj и последующего восстановления напряжения источника 3 питания оказывают воздействие также на ток якоря и скорость вращения двигателя 2 (фиг. 2а, в), причем результирующий эффект этого воздействия проявляется в общем сокращении переходного процесса компенсации углового рассогласования, т.е. является положительным. Технико-экономическая эффективность редлагаемого способа управления бусловлена исключением необходимоси в создании дополнительного сдвига о фазе импульсов управления управляеыми вентилями двигателей и, как ледствие, исключением сложных фазодвигающих устройств, содержащих, как равило, ждущие генераторы пнлообразного напряжения, компараторы и усилители-формирователи импульсов управления. Этот способ управления позволяет осуществить согласованное по углу вращение при ключевом управлении вентилями двигателей, что обеспечивается существенно более простыми и надежными средствами, найример в предельно простом виде - с помощью обычных , электромагнитных реле. Кроме того,
благодаря исключению дополнительного запаздывания открытия управляемых вентилей двигателей улучшается коэффициент мощности электропривода как потребителя электроэнергии, а уменьшение активных потерь энергии в силовых цепях и групповом источнике питания в значительной мере компенсирует дополнительные потери в резисторах якорных цепей.
| название | год | авторы | номер документа |
|---|---|---|---|
| Многодвигательный электропривод | 1983 |
|
SU1280690A1 |
| Многодвигательный электропривод | 1979 |
|
SU851720A1 |
| Способ управления вентильнымМНОгОдВигАТЕльНыМ элЕКТРОпРиВО-дОМ пОСТОяННОгО TOKA | 1977 |
|
SU803096A1 |
| НЕРЕВЕРСИВНЫЙ ЭЛЕКТРОПРИВОД ПОСТОЯННОГО ТОКА | 1989 |
|
RU2020714C1 |
| Электропривод постоянного тока с реверсором | 1981 |
|
SU1008874A1 |
| Многодвигательный электропривод | 1981 |
|
SU1001420A1 |
| Нереверсивная электрическая машина постоянного тока с вентильно-механическим коммутатором | 1989 |
|
SU1791903A1 |
| Многодвигательный электропривод с бесконтактными электродвигателями постоянного тока | 1973 |
|
SU520684A2 |
| Электропривод шахтной подъемной машины | 1973 |
|
SU650192A1 |
| Электропривод для нереверсивнойНЕРЕгулиРуЕМОй пРОКАТНОй КлЕТи | 1978 |
|
SU807470A2 |
СПОСОБ УПРАВЛЕНИЯ МНОГОДВИГАТЕЛЬНЫМ ЭЛЕКТРОПРИВОДОМ ПОСТОЯННОГО ТОКАjзаключающийся в том, что непрерьшно измеряют угловое положение валов двигателей, сравн1-шают полученные значения между собой и при возникновении углового рассогласования между валами уменьшают ток якоря опережающего двигателя, отличающийся тем, что, с целью повышения надежности, определяют момент увеличения углового рассогласования между валами до первого заданного значения и скачком уменьшают ток якоря опережающего двигателя, затем определяют момент уменьшения углового рассогласования между валами до второго заданного значения, измеряют напряжения на якорях двигателей, выделяют из них наименьшее, суммируют его с предварительно заданной уставкой и скачком уменьшают напряжение источника питания двигателей до полученной величины, увеличивают скачком на(Л пряжение на якоре опережающего двигателя до напряжения источника питания и плавно увеличивают напряжение источника питания до прежнего значения.
/7
/
IfgoS.
| Печь для непрерывного получения сернистого натрия | 1921 |
|
SU1A1 |
| Устройство для автоматического поддержания синфазного вращения автономно работающих электродвигателей | 1977 |
|
SU712917A1 |
| Аппарат для очищения воды при помощи химических реактивов | 1917 |
|
SU2A1 |
| Аппарат для очищения воды при помощи химических реактивов | 1917 |
|
SU2A1 |
| Вентильный многодвигательный электропривод | 1974 |
|
SU535705A2 |
| Аппарат для очищения воды при помощи химических реактивов | 1917 |
|
SU2A1 |
