Изобретение относится к силоизме- рт тельной технике и предназначено для многокомпонентного измерения статических и динамических сил и моментов ,
Цель изобретения - повьшение ности и расширение диапазона измерения компонентов сил и моментов.
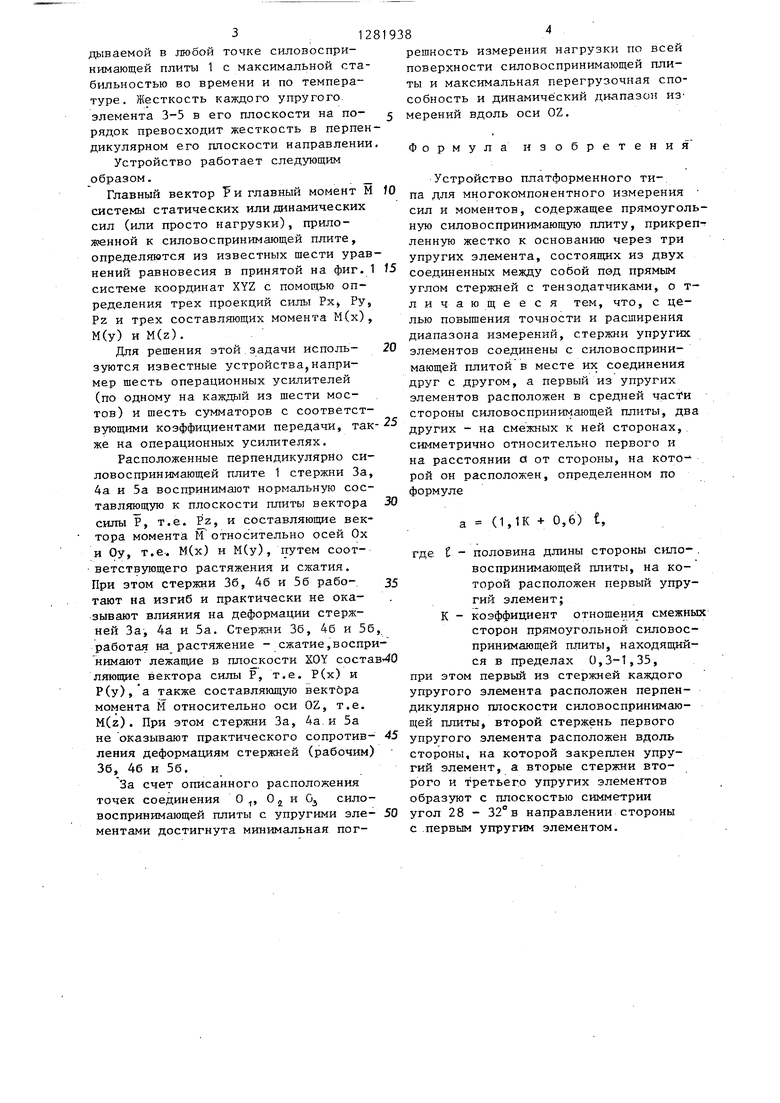
На фиг. 1 схематично изображено устройство, общий вид; на фиг. 2 - пример крепления силовопринимающей плиты к упругим элементам и упругих элементов к основанию..
Устройство платформенного типа для.многокомпонентного измерения сил и моментов состоит из силовосприни- мающей плиты 1, основания 2, -трех одинаковых упругих элементов 3-5, которые присоединены к -основанию и силовоспринимающей плите болтами 6.
Силовоспринимающая плита 1 имеет в плане форму прямоугольника со стоцы стержней в каждом упругом элементе 3, 4 и 5 жестко соединены между собой и основанием 2. Крепление силовоспринимающей плиты 1 в узлах
,д О , Oj и Од стержней и совместная заделка их противоположных концов обеспечивает рабочую деформацию всех шести стержней За, 36, 4а, 46, 5аи 56 в виде растяжения - сжатия,что
fO создает максимальную жесткость уст- ройствй вдоль и вокруг всех трех координатных осей ОХ, OY и уменьшает погрешности измерений динамических нагрузок при обеспечении ми15 .нимального взаимовлияния между всеми ортогональными осями по сравнению с упругими элементами, работ.аищими на изгиб, сдвиг или кручение. При этом упругие элементы
20 расположены так, что плоскость упругого элемента 5 перпендикулярна оси симметрии устройства, а именно оси
„о а плоскости упругих элементов 3 и
ронами 2t и 2Kt, где I - половина дли- ,
„ „ 4 развернуты относительно этой оси
вы стороны параллельной оси ОХ,а , ,оп
... , , i на угол d 28 - 32 таким обраК - коэффициент отношения смежных стозом, что в пересечении всех указанных
плоскостей с плоскостью XOY образуется равносторонний треугольник,, .отмеченный на фиг. 1 штрихпунктирной
рон в пределах 0,3 с К 1,35.
Все упругие элементы 3-5 выполнены в виде плоских Г-образных рам, состоящих из двух расположенных под уг- -зп - « г - -г
„„йг т - тг / /и с с, 30 линией. Упругий элемент 5 находится лом 90 стержней За и Зб, 4а и 46, 5а и 56, м i л
в середине стороны 2 прямоугольной силоБоспринимающей плиты 1, упругие элементы 3 и 4 находятся на смежных ее сторонах 2Kt на расстоянии аот 35 стороны 2 С с упругим элементом 5, удовлетворяющем соотношению:
на которых размещены тензорезисторы. Причем один из стержней в каждой ра- ме„ а именно За, 4а и 5а, перпендикулярен силовоспринимающей плите 1. Рабочей деформацией всех упругих элемен тов является растяжение - сжатие входящих в их состав стержней..Вдоль осей каждого стержня наклеены по два рабочих тензорезистора 7 (каждый с противоположной стороны сечения) и вблизи ни2г по два компенсационных (для температурной компенсации) тен- зореэистора 8 перпендикулярно осям стержней. Все тензорезисторы каждого стержня включены в соответственно ка:ждый из шести мостов Уинстона так, чтобы выходные сигналы мостов были .пропорциональны деформациям растя- ления.- сжатия стержней, не чувствовали деформации изгиба и были подвержены минимальной feмпepaтypнoй и временной нестабильности.
Силовоспринимгйющая плита 1 жестко соединена с каждым упругим элементом 3, 4 и 5 в узлах О ,, 0 и Oj , образованных соединением концов стержней За и 36, 4а и 4б, 5а и 56 в каждой раме 3, 4 и 5, а другие концы стержней в каждом упругом элементе 3, 4 и 5 жестко соединены между собой и основанием 2. Крепление силовоспринимающей плиты 1 в узлах
О , Oj и Од стержней и совместная заделка их противоположных концов обеспечивает рабочую деформацию всех шести стержней За, 36, 4а, 46, 5аи 56 в виде растяжения - сжатия,что
создает максимальную жесткость уст- ройствй вдоль и вокруг всех трех координатных осей ОХ, OY и уменьшает погрешности измерений динамических нагрузок при обеспечении ми.нимального взаимовлияния между всеми ортогональными осями по сравнению с упругими элементами, работ.аищими на изгиб, сдвиг или кручение. При этом упругие элементы
расположены так, что плоскость упругого элемента 5 перпендикулярна оси симметрии устройства, а именно оси
30 линией. Упругий элемент 5 находится , м i л
в середине стороны 2 прямоугольной силоБоспринимающей плиты 1, упругие элементы 3 и 4 находятся на смежных ее сторонах 2Kt на расстоянии аот 35 стороны 2 С с упругим элементом 5, удовлетворяющем соотношению:
а (1,1К + 0,6) , мм,
где - половина длины стороны, сое- 40 диненной с упругим элементом 5., мм;
К - коэффициент отношения смежных сторон силовоспринимающей плиты 1, при этом 45 0,3 К 1,35.
Использование трех двухстержне- вых.упругих элементов 3-5 по сравнению с шестью отдельными стержнями
50 позволяет вдвое сократить Количеств точек крепления силовоспринимающей плиты 1 (точки 0,0 и О, на фиг. 1), что повьш ает технологич- ность изготовления устройства (сни55 жает требования к точности его изготовления) и уменьшает его гистерезис, и дает возможность измерения шести компонент нагрузки (например трех сил и трех моментов), прикладываемои в люоои точке силовоспри- кимающей плиты 1 с максимальной стабильностью во времени и по температуре. Жесткость каждого упругого элемента 3-5 в его плоскости на по- рядок превосходит жесткость в перпендикулярном его плоскости направлении
Устройство работает следующим образом.
Главный вектор и главный момент М системы статических или динамических сил (или просто нагрузки), приложенной к силовоспринимающей плите, определ5потся из известных шести уравнений равновесия в принятой на фиг. 1 системе координат XYZ с помощью определения трех проекций силы Рх Ру, PZ и трех составляющих момента М(х), М(у) и M(z).
Для решения этой задачи исполь- зуются известные устройства,например шесть операционных усилителей (по одному на каждый из шести мостов) и шесть сумматоров с соответствующими коэффициентами передачи, так же на операционных усилителях.
Расположенные перпендикулярно си- ловоспринимающей плите 1 стержни За, 4а и 5а воспринимают нормальную сос- тавл5дащую к плоскости плиты вектора силы Р, т.е. , и составляющие вектора момента М относительно осей Ох и Оу, т.е-. М(х) и М(у), путем соответствующего растяжения и сжатия. При этом стержни Зб, 4б и 56 рабо- тают на изгиб и практически не оказывают влияния на деформации стержней За, 4а и 5а. Стержни Зб, 4б и 56 работая на растяжение - сжатие,воспринимают лежащие в плоскости XOY состав ляющие вектора силы Р, т.е. Р(х) и Р(у), а также составляющую вектора момента М относительно оси OZ, т.е. M(z). При этом стержни За, 4а и 5а не оказывают практического сопротив- ления деформациям стержней (рабочим) Зб, 46 и 56.
За счет описанного расположения точек соединения О , О и 0 сило- воспринимающей плиты с упругими эле- ментами достигнута минимальная погрешность измерения нагрузки по всей поверхности силовоспринимающей плиты и максимальная перегрузочная способность и динамический диапазон из мерений вдоль оси OZ.
Формула изобретения
Устройство платформенного типа для многокомпонентного измерения сил и моментов, содержащее прямоуголную силовоспринимающую плиту, прикре ленную жестко к основанию через три упругих элемента, состоящих из двух соединенных между собой пэд прямым углом стержней с тензодатчиками, о т ли чающееся тем, что, с целью повьшпения точности и расширения диапазона измерений, стержни упругих элементов соединены с силовоспринимающей плитой в месте их соединения друг с другом, а первый из упругих элементов расположен в средней части стороны силовоспринимающей плиты, дв других - на смежных к ней сторонах, симметрично относительно первого и на расстоянии d от стороны, на кото- рой он расположен, определенном по формуле
а (1,1К + 0,6) t.
где
t - половина длины стороны сило- воспринимающей плиты, на которой расположен первый упругий элемент;
К - коэффициент отношения смежны сторон прямоугольной силовоспринимающей плиты, находяшдш- ся в пределах 0,3-1,35, при этом первый из стержней каждого упругого элемента расположен перпендикулярно плоскости силовоспринимающей плиты, второй стержень первого упругого элемента расположен вдоль стороны, на которой закреплен упругий элемент, а вторые стержни второго и третьего упругих элементов образуют с плоскостью симметрии угол 28 - 32°в направлении стороны с .первым упругим элементом.
.Pj
5 t- So.
() M(M X
, ju.
Фаг.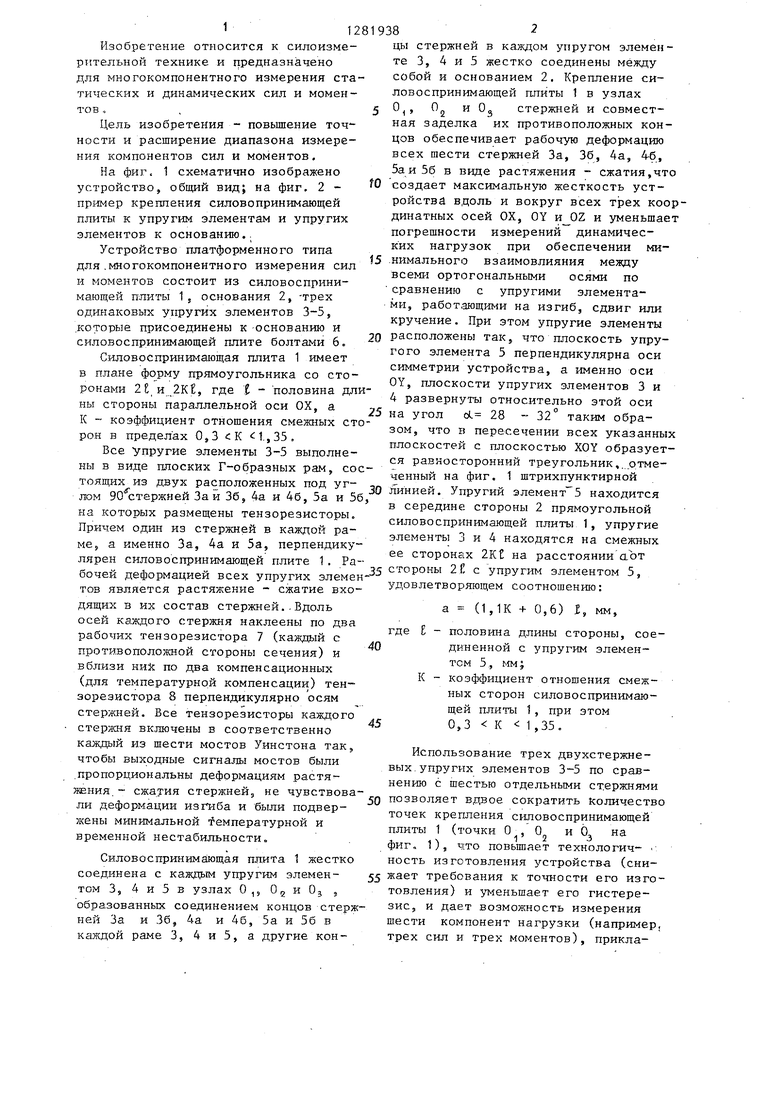
| название | год | авторы | номер документа |
|---|---|---|---|
| Многокомпонентный датчик сил и моментов | 1990 |
|
SU1747961A1 |
| МНОГОКОМПОНЕНТНЫЙ ДАТЧИК СИЛЫ РЕЗАНИЯ | 2011 |
|
RU2455121C1 |
| Устройство платформенного типа для многокомпонентного измерения сил и моментов | 1990 |
|
SU1783329A1 |
| ЧУВСТВИТЕЛЬНЫЙ ЭЛЕМЕНТ | 2018 |
|
RU2698073C1 |
| УСТРОЙСТВО ДЛЯ ИЗМЕРЕНИЯ НАГРУЗОК | 2006 |
|
RU2344385C2 |
| УСТРОЙСТВО ДЛЯ ИЗМЕРЕНИЯ СИЛЫ | 1997 |
|
RU2114406C1 |
| Силомоментный датчик | 1989 |
|
SU1760388A1 |
| Датчик измерения усилий, действующих на модель гребного винта | 1976 |
|
SU588476A1 |
| Устройство для измерения усилий | 1981 |
|
SU979905A1 |
| УПРУГИЙ ЭЛЕМЕНТ ТЕНЗОРЕЗИСТОРНОГО ДАТЧИКА СИЛЫ | 2013 |
|
RU2526228C1 |

Изобретение относится - к сило- измерительной технике и позволяет повысить точность и расширить диапазон измерений компонентов сил и моментов . Устройство состоит из прямоугольной силовоепринимающей плиты 1, соединенной упругими элементами 3 
| Аэродинамические внутримодельные тензометрические весы | 1972 |
|
SU449252A1 |
| Печь для непрерывного получения сернистого натрия | 1921 |
|
SU1A1 |
| ТЕНЗОМЕТРИЧЕСКИЙ ДАТЧИК УСИЛИЙ | 1963 |
|
SU224859A1 |
| Печь для непрерывного получения сернистого натрия | 1921 |
|
SU1A1 |
