Изобретение относится к измерительной технике и может быть использовано в качестве миниатюрного многокомпонентного динамометра для измерения сил и мо- ментов резания в металлообработке ив других технологических процессах, в качестве миниатюрных внутримодельн ых азрО- .динамических весов, для очувствления роботов, в эргономических исследованиях, в приборах и тренажерах спортивного назначения и ТА.
Известен многокомпонентный дат- чик сил и моментов; содержащий сило- восприн и мающую часть, основание и соединяющие их стержни с измеритёльны, мй преобразователями, которым присущи сложность и ctSTl Wfle p fllWH ftocTb конструкций с йёстабильностями во времени и по температуре, .
Цель изобретения - упрощение конструкций и повышение тёхнолртичности её изготовления, повышение точности измерений как в статмке так и в динамике, расширение динамического диапазона измерений и миниатюризации.
На фиг. 1 схематично изображен предлагаемый датчик; на фиг.2 - конструкция одного из стержней с теНзорезисторами; на фиг.З -- рхемэ включения тензорезисторов каждого стержня в мост Уинстона; на фиг.42
XI
Ю О
9 - схемы вычисления компонент измеряемых векторов силы и момента Pz, Ру, Рх, M(z), М(у) и М(х) в показанной на фиг.1 системе координат XYZ,
Датчик состоит из силовоспринимаю- щей части 1, основания 2, шести одинаковых стержней 3, 4, 5, 6, 7 и 8, соединяющих силовоспринимающую часть 1 и основание 2 с помощью заделок 9 Стержни объединены -в пары 3-4, 5-6 и 7-8 под углом # « 108-120°, соединяющиеся между собой у основания 2. Плоскости пар 3-4, 5-6 и 7-8 перпендикулярны силовоспринимающей части 1 и основанию 2 и образуют в их пересечении равносторонние треугольники (пунктирные линии на фиг.1). Каждый стержень 3-8 имеет длину L и прямоугольное сечение со сторонами axb, причем величина L равна или больше утроенной большей стороне сечения (а или Ь) На противоположных сторбнах каждого стержня вдоль его оси в средней части наклеены тенэорезисторы 10 с базой 1, которые преобразуют деформа- цикГрастяжения - сжатия стержня в изменение своего омического сопротивления.
При этом длина L любого стержня равна (или) больше удвоенной величине базы 1. В непосредственной близости от рабочих тен- зорезисторов 10 перпендикулярно осям стержней 3-8 наклеены компенсационные тензорезмсторы 11 Если величины сторон сечений а и b стержней меньше базы тензо- резисторов 11, то последние могут быть наклеены на силовоспринммающей части 1 (например, заштрихованные полости 12 на фиг.2) или на основании 2 вблизи своих стержней,
Все тенэорезисторы 10 и 11 (или 10 и 12) каждого из стержней включены в мосты Уинстона (всего в устройстве шесть мостов - по числу стержней), выходные напряжения которых V3-Ve пропорциональны деформациям растяжения -сжатия соответствующих стержней. Причем рабочие тензо- резисторы 10 каждого стержня включены в противоположные плечи моста Уинстона, а компенсационные тензорезисторы 11 (или 12) - в смежные с первыми плечи моста. Такое известное включение тензорезисто- ров 10, 11 (или 12) обеспечивает компенсацию изгибной деформации стерхшей, минимизирует температурную и временную нестабильность всех шести мостовых схем.
Устройство работает следующим образом.
Воздействующие на силовоспринимающую часть 1 векторы силы и момента (не показаны) приводят к соответствующей де- формации части или всех шести 3-8 стержней. Как показали экспериментальные
исследования, доминирующим видом деформации каждого стержня является растяжение - сжатие, которые и воспринимают рабочие тензорезисторы 10. В результате
выходные напряжения каждого моста N/3-Ve пропорциональны нормальным силам соответствующих стержней 3-8.
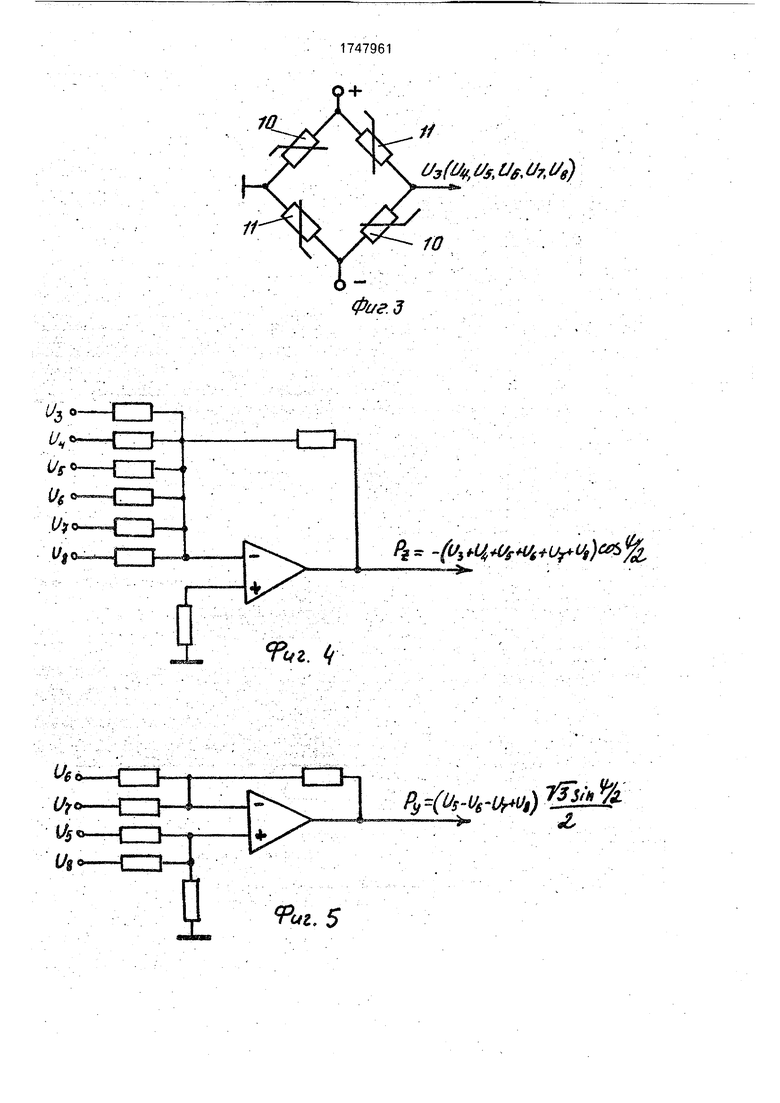
Секторы статических или динамических силы и момента, приложенных к силовоспринимающей части 1, в данной статически определимой конструкции вычисляются из известных шести уравнений равновесия в принятой на фиг.1 системе координат XY с помощью определения трех проекций силы
Рх, Ру, PZ и трех составляющих момента М(х), М(у) и (Mz) по выходным напряжениям мостов Va-Ve. Для решения этой известной задачи используются известные устройства, например шесть сумматоров на операционнЫх усилителях с соответствующими коэффициентами передачи и инверсиями (фиг 4-фиг 9).
Использование заделок 9 концов всех
стержней, а не сферических шарниров , обеспечивает упрощение конструкции устройства и, ее технологичности, Этим же целям служит равенство всех стержней 3-8 по длине и по размерам их прямоугольных
сечений. При сборке устройства стержни могут ввариваться между силовоспринимающей частью 1 и основанием 2 по отдельности или совместно предварительно изготавливаться из листового материала
штамповкой и (или) фрезеровкой имеете с частями силовоспринимающей части 1 и основания 2 с последующей сваркой мест соединений и т.д. Прямоугольное сечение стержней упрощает процедуру наклейки рабочих и компенсационных тензорезисторов 10 и 11. При этом повышается точность измерений как в статике, так и в динамике за счет устранения эффекта гистерезиса, минимизации нелинейности и повышения
жесткости, а с ней низших собственных частот устройства в целом, с повышением прочности и перегрузочной способности, что обеспечивается с помощью попарного объединения стержней 3-4, 5-6, 7-8 под
углом тр 108-120° в трех плоскостях, перпендикулярных силовоспринимающей части 1 и основанию 2 в виде равносторон- k них треугольников, повернутых друг относительно друга под углом 60°. Для
минимизации размеров.устройства экспериментально определены предельные соотношения: длина каждого стержня в три раза превышает размер большей стороны его сечения (а или 0) и в два раза превышает
базу рабочих 10 тензорезисторов 1.
Формула изобретения Многокомпонентный датчик сил и моментов, содержащий силовоспринимаю- щую часть, связанную с параллельным ей основанием шестью стержнями с тензоре- зисторами, отличающийся тем, что, с целью повышения точности и уменьшения габаритов, стержни выполнены с прямоугольным сечением и одинаковыми по длине, и скреплены с силовоспринимающей частью и основанием при помощи жестких заделок, а основание и силовоспринимаю- щая часть представляют собой повернутые друг относительно друга на угол 60° треугольники, при этом стержни скреплены поЪ
в
парно в вершинах основания и силовоспринимающей части, и углы при вершинах треугольных граней, образованных стержнями в месте закрепления в силовоспринимающей части Составляют 108-120°, а сами эти вершины находятся в вершинах треугольника силовоспрмнимающей части, при этом треугольные грани с вершинами в си- - ловоспрмнимающей части перпендикулярны плоскости основания и плоскости силовоспринимающей части, а длина каждого стержня в три и более раза превышает длину большей стороны его сечения и в два и более раза превышает базу тензорезисторов.

| название | год | авторы | номер документа |
|---|---|---|---|
| Устройство платформенного типа для многокомпонентного измерения сил и моментов | 1984 |
|
SU1281938A1 |
| МНОГОКОМПОНЕНТНЫЙ ДАТЧИК СИЛЫ РЕЗАНИЯ | 2011 |
|
RU2455121C1 |
| Устройство платформенного типа для многокомпонентного измерения сил и моментов | 1990 |
|
SU1783329A1 |
| Трехкомпонентный динамометр для измерения составляющих усилия резания | 1988 |
|
SU1543262A1 |
| Очувствленное запястье манипулятора | 1984 |
|
SU1308466A1 |
| Многокомпонентный датчик силы | 1989 |
|
SU1677537A1 |
| Устройство для измерения деформаций | 1978 |
|
SU732662A1 |
| ЧУВСТВИТЕЛЬНЫЙ ЭЛЕМЕНТ | 2018 |
|
RU2698073C1 |
| Устройство для замера реакций грунта и силы растяжения в гусеничной цепи при движении гусеничной машины | 1989 |
|
SU1651108A1 |
| Динамометр для измерения сил резания | 1990 |
|
SU1732194A1 |



Использование: область измерительной техники и может быть использовано в качестве миниатюрного многокомпонентного динамометра дл я измерения; сил и моментов резаний в металлообработке, а также в качестве миниатюрных в н утр им отельных аэродинамических весов. Сущность изобретения: датчик содержит силовоспринимающую часть (1), связанную с параллельным ей основанием (2) шестью стержнями (3-8) с тензорезисторамй.при этом стержни (3-8) выполнены с прямоугольным сечением и .6дййа р вы ми П 0 л1йГн КСкйёг1Щнь1 .Ь сйло- воспрйнймаюЧцеЙ частью (1) и основанием
Фиг. 2
11
t/, о
сь
. «
Й/«. 5
X/
l/9()
Фиг.З
4«
,-«--
-(4-,)
,
4t
%+-tn
fah±jf $-$ $) %
Фчг.6
« tfaff
M($ (-У3.Ц,) ШУ2
1 s
Рчг.7
-№-%+ ) (
tpui.g
u
Пч.9
8
2-etsSL
.
/; ; .
| Триер | 1930 |
|
SU29690A1 |
| Печь для непрерывного получения сернистого натрия | 1921 |
|
SU1A1 |
| , Авторское свидетельство СССР № 974155, кл.6 01 С 1/22, 1981. | |||
