Изобретение относится к машиностроению, в частности к робототехнике, и может быть использовано для
to
захвата деталей с помощью промышленных роботов.
Цель изобретения - повьшение надежности работы схвата.
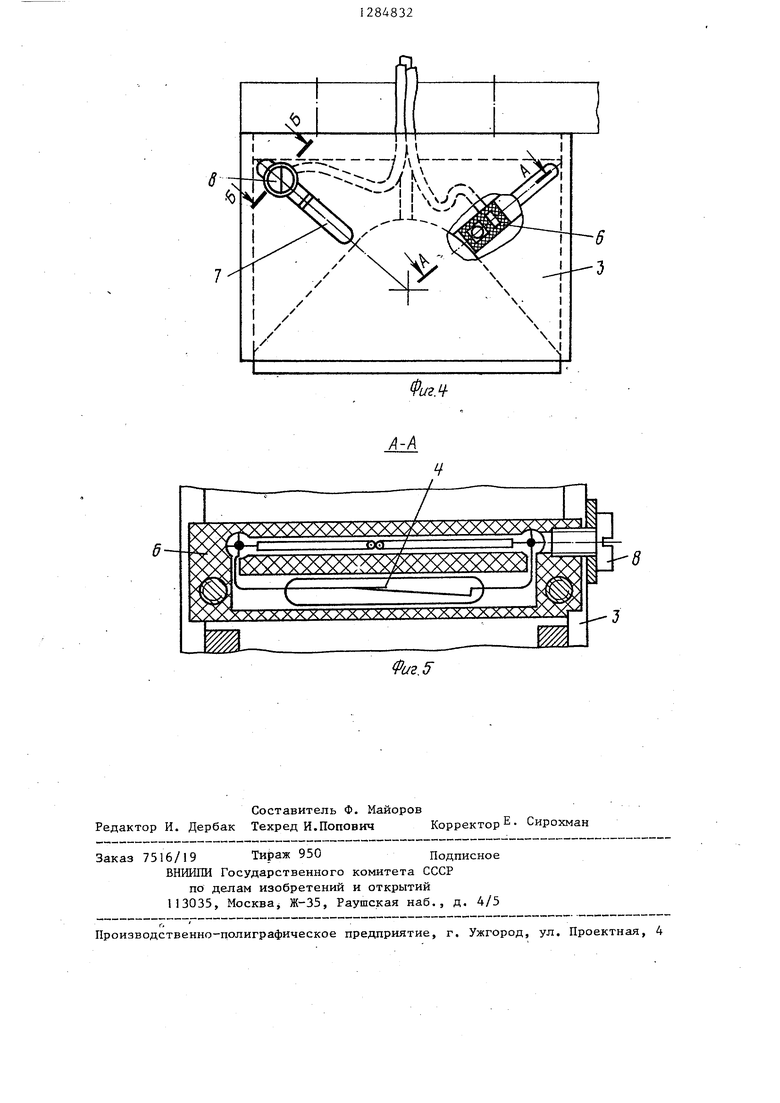
На фиг. 1 изображена схема распределения потоков рассеяния электромагнита при отсутствии заготовок; на фиг. 2 - то же, при наличии одной заготовки в схвате; на фиг. 3 - то же, при наличии двух заготовок в схвате; на фиг. 4 - схват, общий вид; на фиг. 5 - разрез А-А на фиг. 4.
Схват содержит электромагнит 1 с полюсами 2, установленный в корпусе 3, и два магнитоуправляемых контакта 4 и 5, расположенных в обоймах 6 из
немагнитопроводного материала. Обой- управляемых контактов 4 и 5 дости- мы 6 установлены в пазах 7, выполнен- гается путем регулировки положений
чего магнитный поток со стороны маг нитоуправляемых контактов 4 и 5 (герконов) ослабевает и магнитоуп- равляемый контакт 4 (геркон) размыкается. Система управления роботом получает сигнал Наличие заготовки В случае захвата двух и более за готовок 9 (фиг. 3) шунтирующее воздействие на магнитный поток усиливается, в результате чего магнитный поток со стороны магнитоуправляемых контактов 4 и 5 (герконов) еще боль ше ослабевает и магнитоуправляемые контакты размыкаются. Система управ 5 ленмя роботом получает сигнал Наличие двух заготовок, после обработки которого выдает команду Переход к подпрограмме или Останов
ка . Требуемый режим работы магнито
нь:х в корпусе 3, с возможностью параллельного перемещения и фиксации с помощью винтов 8.
Устройство работает следующим образом.
При подаче напряжения на электромагнит 1 (фиг. 1) магнитные силовые линии распределяются равномерно относительно полюсов 2 и в целом магнитное поле, действующее на магнитоуправляемые контакты 4 и 5 (герконы) достаточно велико для их срабатывания, т.е. замыкания. Система управления роботом получает сигнал Отсутствие заготовки. При опускании схвата манипулятора на заготовки ,9 электромагнит 1 полюсами 2 захватывает ее. Заготовка 9 (фиг. 2)
оказывает шунтирующее воздействие на магнитный поток, в результате
чего магнитный поток со стороны магнитоуправляемых контактов 4 и 5 (герконов) ослабевает и магнитоуп- равляемый контакт 4 (геркон) размыкается. Система управления роботом получает сигнал Наличие заготовки. В случае захвата двух и более заготовок 9 (фиг. 3) шунтирующее воздействие на магнитный поток усиливается, в результате чего магнитный поток со стороны магнитоуправляемых контактов 4 и 5 (герконов) еще больше ослабевает и магнитоуправляемые контакты размыкаются. Система управ- ленмя роботом получает сигнал Наличие двух заготовок, после обработки которого выдает команду Переход к подпрограмме или Остановка . Требуемый режим работы магнито
обойм 6 в пазах 7 корпуса 3 (фиг.4) с последующим закреплением обойм винтами В..
Формула изобретения
Схват манипулятора, содержащий установленный в корпусе электромагнит и два магнитоуправляемых контакта, один из которых установлен в корпусе параллельно магнитным силовым линиям электромагнита, отличающийся тем, что, с целью повьшения надежности работы схвата, он снабжен двумя обоймами, выполненными из немагнитопроводно- го материала, при этом каждый магни- тоуправляемый контакт закреплен в обойме, а обоймы установлены в корпусе с возможностью параллельного перемещения и фиксации.
/V
Фс/г.З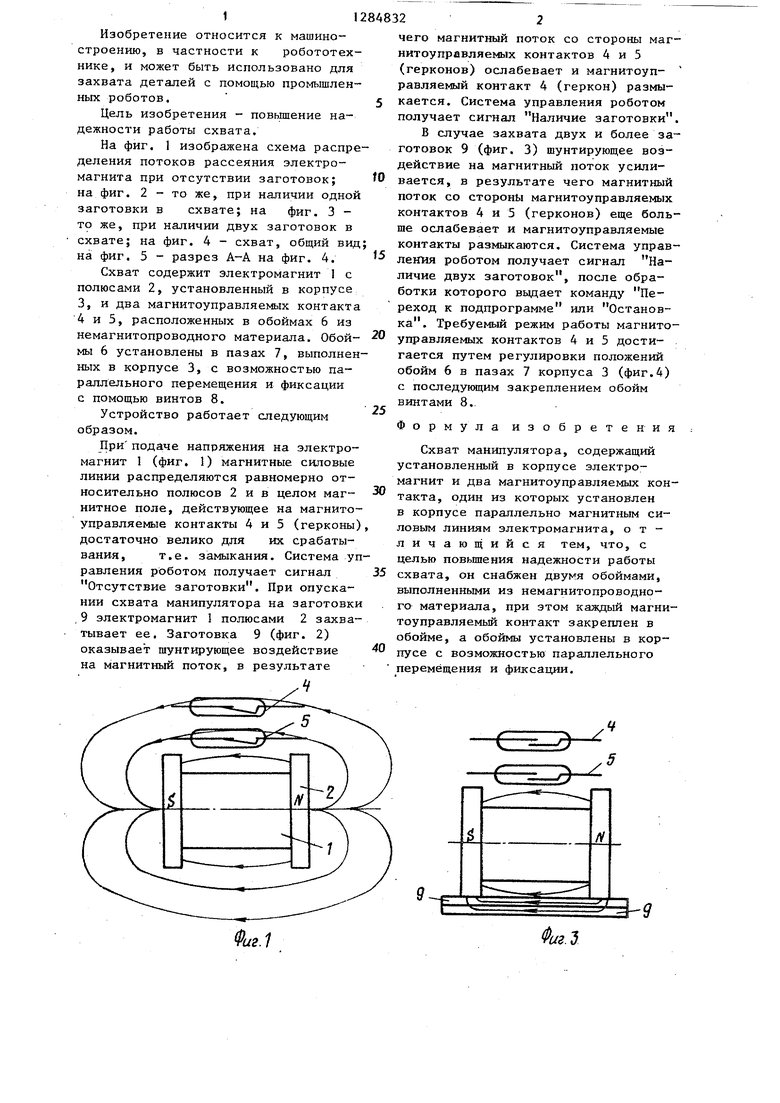
| название | год | авторы | номер документа |
|---|---|---|---|
| Устройство для захвата листовых заготовок | 1989 |
|
SU1785895A1 |
| Электромагнитный схват | 1985 |
|
SU1306712A1 |
| Устройство контроля захвата листовой заготовки рукой промышленного робота | 1980 |
|
SU925624A1 |
| Устройство для защиты трехфазной электроустановки от обрыва фаз | 1990 |
|
SU1808164A3 |
| Схват промышленного робота | 1986 |
|
SU1313706A1 |
| Тепловой датчик | 1979 |
|
SU829633A1 |
| Магнитоуправляемый выключатель | 1990 |
|
SU1786527A1 |
| Контактор переменного тока с бездуговой коммутацией | 1973 |
|
SU1034084A1 |
| Электромагнитный схват манипулятора | 1985 |
|
SU1268410A1 |
| Переключатель | 1990 |
|
SU1723598A1 |
Изобретение относится к машиностроению, в частности к робототехнике , и может быть использовано для захвата деталей с помощью промышленных роботов. Целью изобретения является повьшение надежности работы схвата. При подаче, напряжения на электромагнит I магнитные силовые .линии распределяются равномерно относительно полюсов 2 и магнитоуправ- ляемые контакты 4 и 5 замкнуты, что соответствует отсутствию заготовки 9 в схвате. При наличии одной заготовки 9 в схвате в результате шунтирования магнитного потока контакт 4 размыкается, что воспринимается системой управления как сигнал о наличии в схвате заготовок. В случае, если при подъеме схвата магнитоуп-, равляемый контакт 5 размыкается, в. результате шунтирующего влияния нескольких заготовок, то этот сигнал поступает в систему управления схва- том. 5 ил. i (Л 1C 00 4 00 СлЭ 1C
ХХХХХХХХХХХЮ ХХХХХХХХХ2
Gg
X XXXXXXXX 7SA - - Составитель Ф. Майоров Редактор И. Дербак Техред И.Попович Корректор Сирохман
Заказ 7516/19 Тираж 950Подписное
ВНИИПИ Государственного комитета СССР
по делам изобретений и открытий 113035, Москва Ж-35, Раушская наб., д. 4/5
Производственно-полиграфическое предприятие, г, Ужгород, ул. Проектная, 4
Фиг, 5
| Устройство контроля захвата листовой заготовки рукой промышленного робота | 1980 |
|
SU925624A1 |
| Видоизменение пишущей машины для тюркско-арабского шрифта | 1923 |
|
SU25A1 |
