Изобретение относится к робототехнике и может быть применено в промышленных роботах и манипуляторах для подачи заготовок из стопы под пресс. Цель изобретения - расширение функциональных возможностей схвата и повышение надежности, захвата путем использования электромагнита с двумя подвижными одна относительно другой обмотками, обеспечивающими перемеш,ение рабочей поверхности схвата с одновременным увеличением усилия захвата. На фиг. 1 изображен схват при захвате объекта манипулирования, общий вид; на фиг. 2 - то же, при манипулировании объектом. Схват содержит установленную в корпусе 1 цилиндрическую обмотку 2, дополнительную цилиндрическую обмотку 3, охватывающую сердечник 4 и жестко с ним связанную, который вместе с дополнительной обмоткой 3 расположен в корпусе 1 внутри обмотки 2 с возможностью осевого перемещения. Обмотки 2 и 3 через контакты 5 и 6 выключателей соединены с источником электрической энергии (не показан). Электромагнитный схват работает следующим образом. В исходном положении контакты 5 и 6 разомкнуты, сердечник 4 с обмоткой 3 находится в нижнем положении на поверхности заготовки 7. При подключении обмотки 3 к источнику электрической энергии с помощью контакта 6 заготовка 7 примагничивается к сердечнику 4. Затем замыкается контакт 5 и сердечник 4 с обмоткой 3 втягиваются в обмотку 2, поднимая заготовку 7. Поскольку втягивание сердечника 4 возможно только при согласных направлениях токов в обмотках 2 и 3, происходит усиление внещнего магнитного поля за счет суммирования магнитных потоков, что повышает силу удержания в схвате заготовки 7, на которую при переносе воздействует инерционная сила. После переноса заготовки 7 сначала размыкается контакт 5 и сердечник 4 с заготовкой 7 опускается до упора, затем размыкается контакт б и заготовка 7 освобождается от схвата. Формула изобретения Электромагнитный схват манипулятора, содержащий установленную в корпусе основную цилиндрическую обмотку и сердечник, размешенный в корпусе внутри обмотки с возможностью осевого перемещения, отличающийся тем, что, с целью расширения функциональных возможностей и повышения надежности, он снабжен дополнительной цилиндрической обмоткой, охватывающей подвижный сердечник и жестко с ним связанной.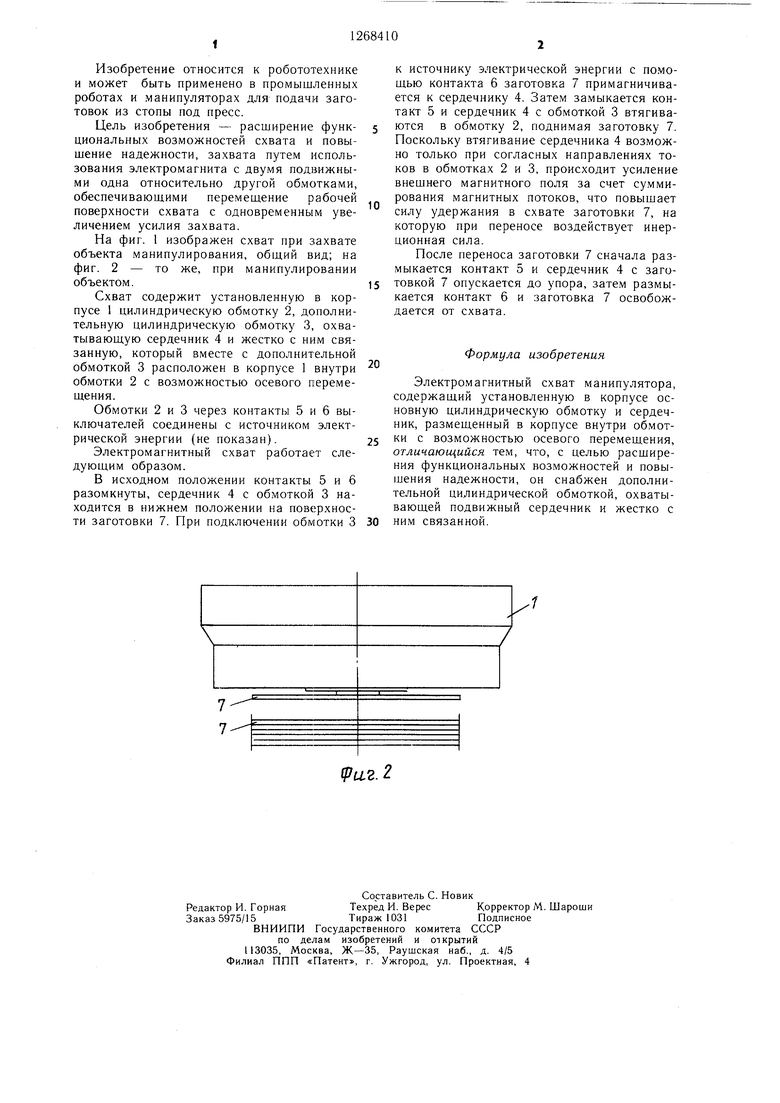
| название | год | авторы | номер документа |
|---|---|---|---|
| Схват промышленного робота | 1986 |
|
SU1313706A1 |
| Электромагнитный схват | 1985 |
|
SU1296407A1 |
| Электромагнитный схват | 1984 |
|
SU1288055A1 |
| Схват манипулятора | 1985 |
|
SU1284832A1 |
| Схват манипулятора | 1980 |
|
SU965765A1 |
| Схват манипулятора | 1991 |
|
SU1811479A3 |
| УСТРОЙСТВО ДЛЯ ЗАХВАТА И ПЕРЕМЕЩЕНИЯ ПРЕДМЕТОВ | 2005 |
|
RU2284897C1 |
| Промышленный робот | 1990 |
|
SU1729740A1 |
| Автоматизированный комплекс для листовой штамповки заготовок с внутренним асимметричным контуром | 1984 |
|
SU1253699A1 |
| Электромагнитный захват | 1982 |
|
SU1074800A1 |
Изобретение относится к робототехнике и может быть применено в промышленных роботах и манипуляторах для подачи заготовок из стопы под пресс. Целью изобретения является расширение функциональнь х возможностей схвата и повышение надежности. Электромагнитный схват, содержит установленную в корпусе 1 основную цилиндрическую обмотку 2, внутри которой с возможностью осевого перемешения установлен сердечник 4 с дополнительной обмоткой 3. При включении обмотки 3 происходит захват заготовки 7, которая затем при включении обмотки 2 приподнимается над стопой. При этом за счет суммирования магнитных потоков, создаваемых обмотками, сила удержания заготовки 7, на которую при переносе воздействует инерциопная сила, увеличивается. Выключение схвата происходит в обратной последовательности. 2 ил. ш (О ю О5 СХ) 4;: О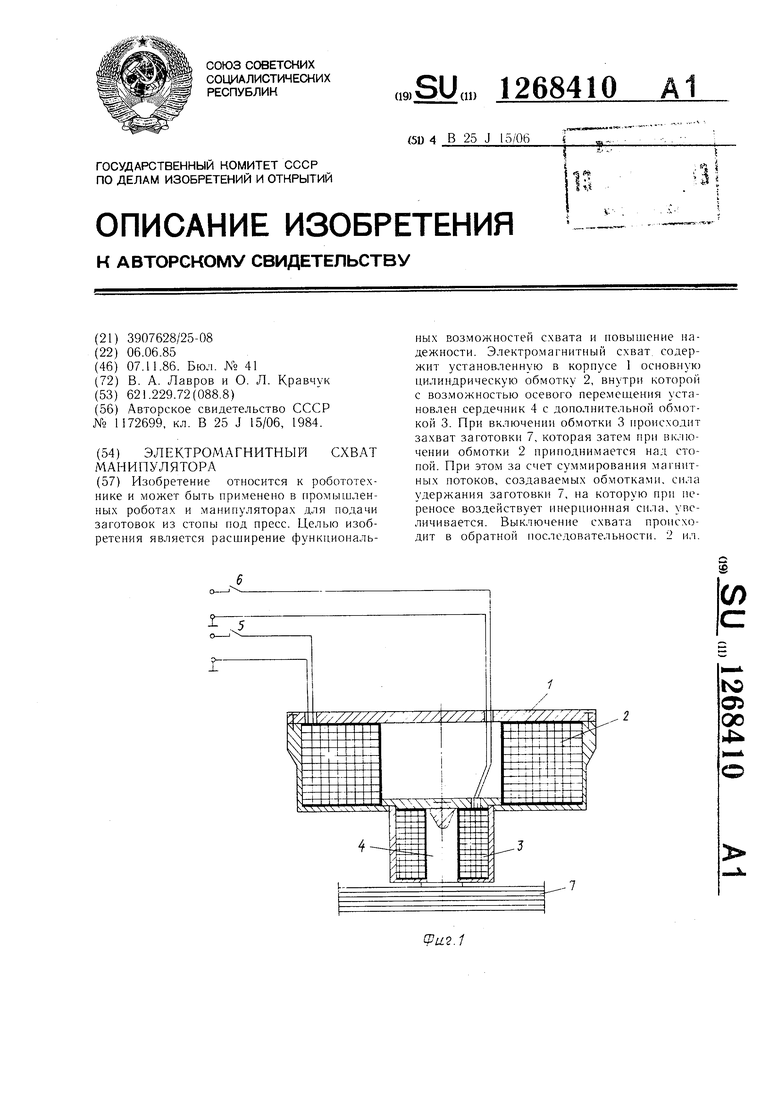
7 7
(pu2.2
| Электромагнитный схват | 1984 |
|
SU1172699A1 |
| Видоизменение пишущей машины для тюркско-арабского шрифта | 1923 |
|
SU25A1 |
