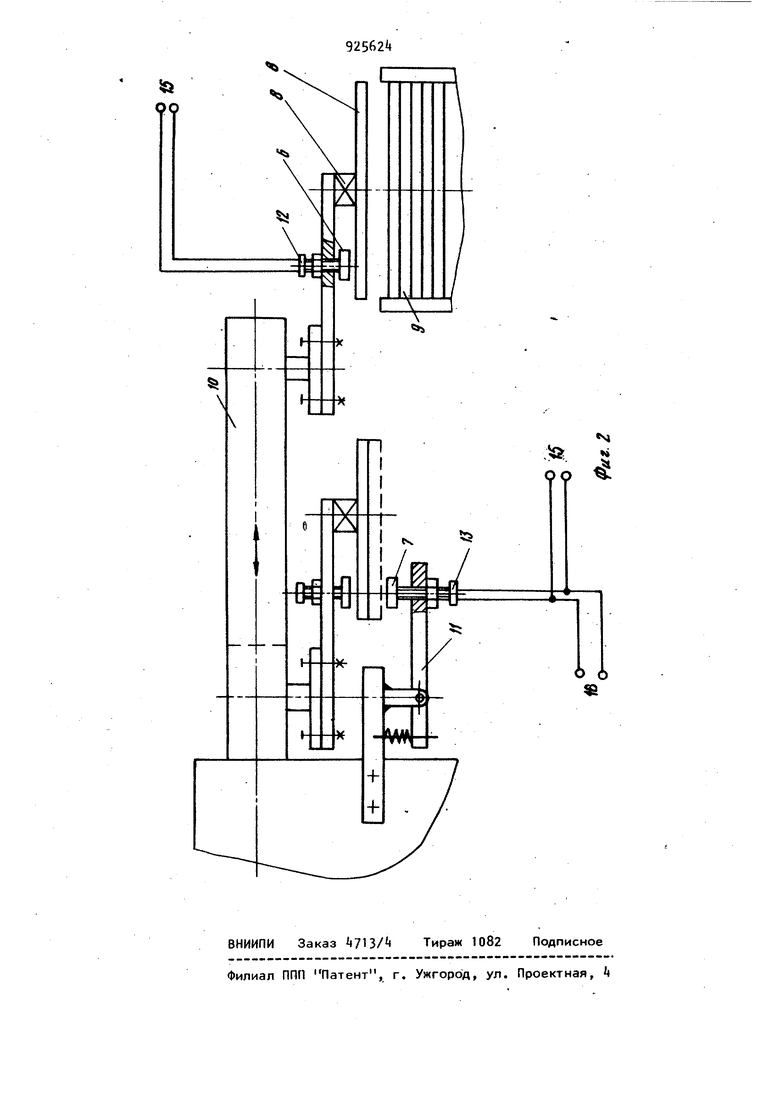
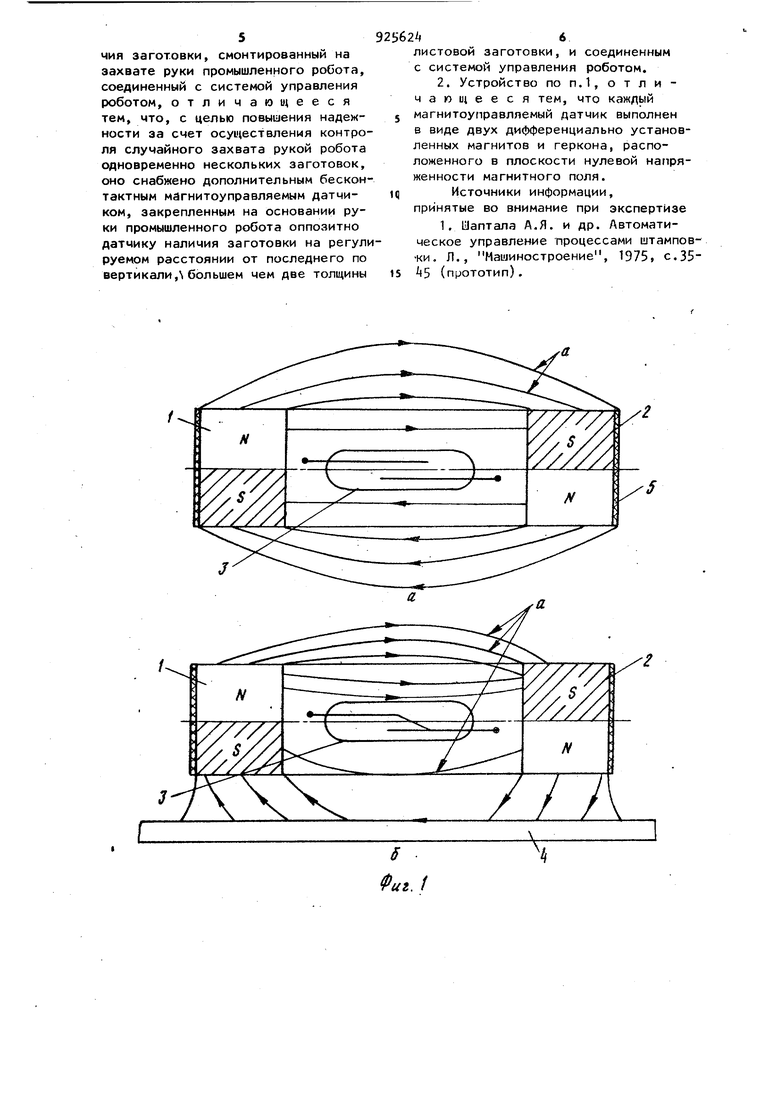
Изобретение относится к области автоматизации процессов листовой тамповки с использованием промышленных роботов Известно устройство контроля захвата листовой заготовки рукой промышленного робота, содержавшее бесконтактный магнитоуправляемый датчик наличия заготовки, смонтированный на захвате руки промышленного робота, соединенный с системой управлени роботом С1. Недостатком устройства является . невозможность осуществлять контроль захвата рукой робота одновременно нескольких заготовок. Кроме того, в таком устройстве сложно взаимно располагать датчик и магнит при конт роле заготовок объемной (1юрмы, что связано с необходимостью увеличения расстояния между датчиком и магнитом с соответствующим увеличением напряженности магнитного поля. Целью изобретения является повышение надежности ее работы. Поставленная цель достигается . тем, что устройство контроля захвата листовой заготовки рукой промышленного робота, содержащее бесконтактный магнитоуправляемый датчик наличия заготовки, смонтированный на захвате руки промышленного робота, соединенный с системой управления роботом, снабжено дополнительным бесконтактным магнитоуправляемым датчиком, закрепленным на основании руки промышленного робота оппозитно датчику наличия заготовки на регулируемым расстоянии от последнего по вертикали, большем, чем две толщины листовой заготовки, и соединенным с системой управления роботом. Каждый , магнитоуправляемый датчик выполнен в виде двух дифференциально установленных магнитов геркона, расположенного в полости нулевой напряженности магнитного поля. На фиг.1 (а и б) показан датчик, ,на фиг.2 - схема расположения датчиков на руке промышленного робота и схема их подключения в цепи управления роботом, и цепь электромагнитных захватов. На чертежах обозначены дифференциально расположенные магниты 1 и 2, геркон 3, силовые магнитные линии а, заготовка k,, корпус 5 датчика, 6контроля наличия заготовки, датчик 7контроля захвата нескольких заготовок, электромагнитные захваты 8, заготовки 9, РУка робота 10, поворотный подпружиненный рычаг 11 и мик рометрические винты 12, 13. Между двумя дифференциально расположенными магнитами 1 и 2, заключенными в корпус 5, возникает магнит ное силовое поле, силовые линии кото рого показаны стрелками а. В этом магнитном поле существует плоскость с нулевой напряженностью магнитного поля. Если в эту полость поместить геркон, например, с нормально открытыми контактами, то из-за отсутствия поперечных магнитных сил контакты открыты. При введении в магнитное поле ферромагнитной заготовки силовые линии магнитногоцоля искривляются, как показано на фиг.16 Это искривление вызывает, замыкание контактов геркона. Замыкание контактов коммутирует электрическую цепь, в которую включен датчик. На этом принципе основано действие датчиков, используемых в предлагаемом устройст ве контроля. Контроль осуществляется следующим образом. Датчик 6 контроля наличия заготовки закрепляется на захвате р/ки робота и настраивается с помощью микрометрических винтов 12 относительно плоскости захвата листовой з готовки, например, электромагнитным захватом 8 таким образом, чтобы при захвате заготовки она попадала в магнитное поле магнитов датчика и вызывала искривление магнитных сило вых линий. В этом случае контакты геркона датчика 6 замыкаются.и коммутируют цепь управления 15 робо том, давая сигнал на выполнение сле дую1чих команд.Если захват заготовки не произошел, контакты геркона остаются открытыми, робот останавли92вается или переходит на выполнение другой подпрограммы. Датчик 7 контроля наличия нескольких заготовок закрепляется на руке робота, например, на подпружиненном двуплечем рычаге 11, закрепленном на станине робота с возможностью поворота. Он настраивается так же, как и датчик 6 винтом 13 но таким образом, чтобы искривление магнитных силовых линий магнитов у этого датчика происходило только в том случае, когда в магнитное поле этого датчика попадает толстая заготовка или две или более сцепившиеся друг с другом заго товки. Для этого второй датчик 7 устанавливается в рабочем положении в плоскости,параллельной плоскости датчика 6 контроля наличия заготовки на расстоянии от него, которое контролируется при настройке датчика. Датчик 7 включается в цепь системы управления роботом и в цепь управления 16 приводом захвата. После захвата листовой заготовки захватом руки робота из транспортно-ориентирующего уст- . ройства и коммутации цепи управления роботом датчиком 6 рука робота вдвигается в крайнее заднее положение. Датчик 7 находится снизу по oTHoiueнию к захваченной /««стовой заготовке. При захвате более толстой заготовки или нескольких заготовок одновременно, ни)чняя заготовка попадает в магнитное поле магнитов датчика 7, вызывает искривление магнитных силовых линий, размыкающих контакты геркона второго датчика (в этом случае целесообразно во втором датчике использовать геркон с нормально закрытыми контактами). При размыкании контактов геркона разрываются цепи системы управления роботом и цепи управления электромагнитами захватов. Робот останавливается и захваты сбрасыЪают заготовки. Использование предложенного устройства контроля позволит при обслу)1а1вании роботами листоштамповочных операций снизить брак, повысить производительность и исключить аварийные ситуации. Формула изобретения 1. Устройство контроля захвата листовой заготовки рукой промыилен ного робота, содержащее бесконтактный магнитоуправляемый датчик нали
чия заготовки, смонтированный на захвате руки промышленного робота, соединенный с системой управления роботом, отличающееся тем, что, с целью повышения надежности за счет осуществления контроля случайного захвата рукой робота одновременно нескольких заготовок, оно снабжено дополнительным бесконтактным магнитоуправляемым датчиком, закрепленным на основании руки промышленного робота оппозитно датчику наличия заготовки на регули руемом расстоянии от последнего по вертикали, большем чем две толщины
2562)6
листовой заготовки, и соединенным с системой управления роботом.
2. Устройство по п.1, о т л и чающееся тем, что каждый 5 магнитоуправляемый датчик выполнен в виде двух дифференциально установленных магнитов и геркона, расположенного в плоскости нулевой напряженности магнитного поля. iq Источники информации,
принятые во внимание при экспертизе
1. Шаптала А.Я. и др. Автоматическое управление процессами штамповки. Л., Машиностроение, 1975, с.3515 45 (прототип).
| название | год | авторы | номер документа |
|---|---|---|---|
| Устройство для контроля подачи листовой заготовки | 1990 |
|
SU1756148A1 |
| Устройство для захвата листовых заготовок | 1989 |
|
SU1785895A1 |
| Автоматизированный комплекс для листовой штамповки | 1986 |
|
SU1456269A1 |
| Схват манипулятора | 1985 |
|
SU1284832A1 |
| Электромагнитный схват | 1985 |
|
SU1306712A1 |
| Устройство контроля захвата листовых заготовок | 1988 |
|
SU1613320A1 |
| Робот к листоштамповочному прессу | 1988 |
|
SU1542672A1 |
| Электромагнитный захватный агрегатный модуль | 2016 |
|
RU2622069C1 |
| Устройство контроля захвата листовой заготовки рукой промышленного робота | 1986 |
|
SU1423369A1 |
| Схват промышленного робота | 1986 |
|
SU1313706A1 |