Изобретение относится к вычислительной технике и может быть использовано в автоматизированных системах сбора и обработки информации для сопряжения дискретных датчиков с электронной вычислительной машиной (ЭВМ).
Цель изобретения - повышение достоверности вводимой информации.
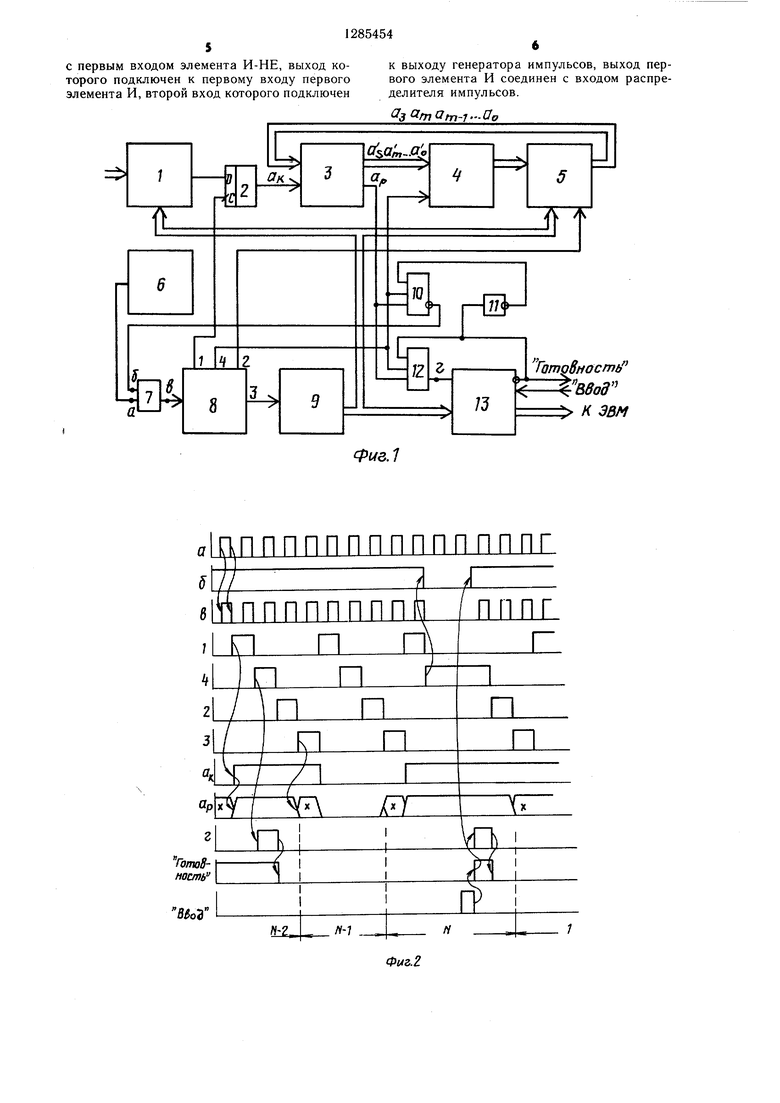
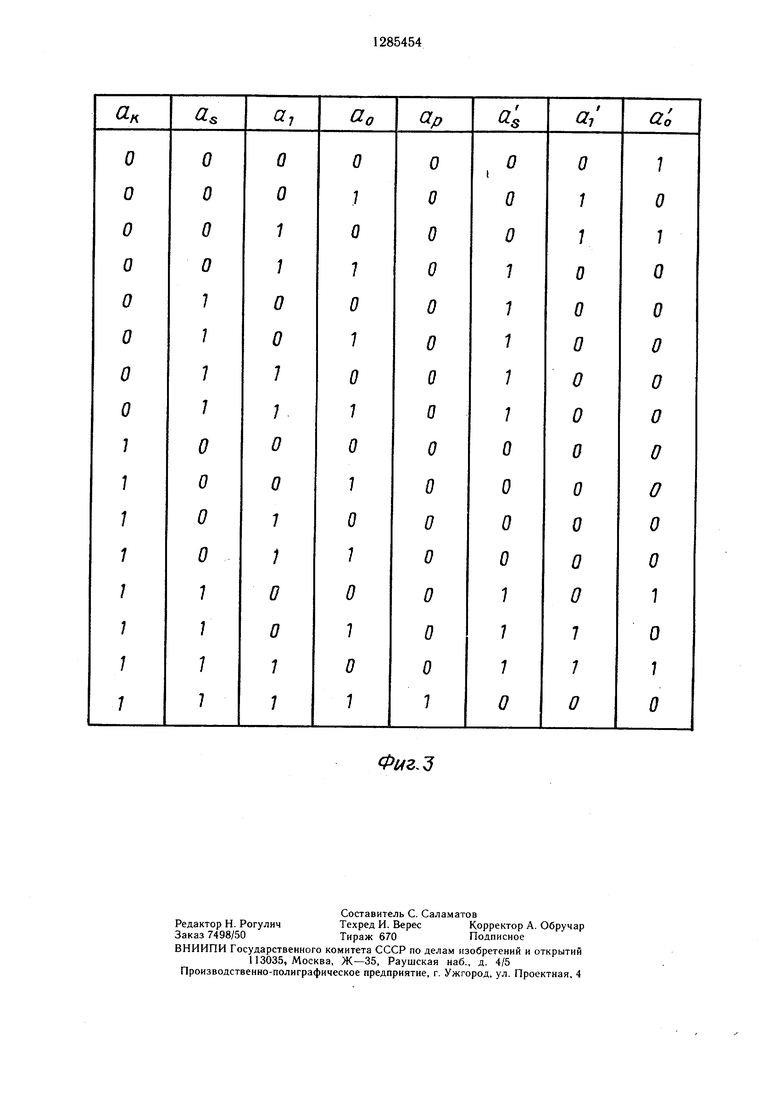
На фиг. 1 представлена структурная схема устройства; на фиг. 2 - его временные диаграммы; на фиг. 3 - таблица истинности преобразователя кода.
Устройство содержит коммутатор 1, триггер 2, преобразователь 3 кода, регистр 4, блок 5 памяти, генератор 6 импульсов, элемент И 7, распределитель 8 импульсов, счетчик 9, элемент И-НЕ 10, элемент НЕ 11, элемент И 12, блок 13 синхронизации и согласования.
Устройство осуществляет запись адреса опрашиваемого датчика в блок 13 синхронизации и согласования и вырабатывает сиг- нал готовности, свидетельствуюший, что устройство готово к передаче этого адреса в ЭВМ, при определении действительного наличия сигнала от датчика после действительного его отсутствия.
В устройстве используются следующие критерии определения факта действительного отсутствия сигнала и действительного наличия сигнала: наличие сигнала является действительным, если устройство определяет его наличие п раз подряд; отсутствие сигнала является действительным, если устрой- ство определяет его отсутствие п раз подряд.
Для обеспечения надежной работы устройства частота импульсов, вырабатываемых генератором 6 импульсов, должна по крайней мере в 2-n-N раз, где N - количество дискретных датчиков, превышать максимальную частоту следования сигналов от дискретного датчика.
Установку адреса опрашиваемого датчика и адреса ячейки блока 5 памяти, в которой хранится информация о предшествуюшем состоянии датчика, производит счетчик 9, коэффициент пересчета которого равен количеству датчиков. В цикле опроса одного датчика осуществляется формирование и запись в блок 5 памяти информации о новом состоянии датчика на основании информации о предшествующем его состоянии, считанной из блока 5 памяти, и текущем состоянии, записанном в триггере 2.
Цикл опроса одного датчика состоит из четырех тактов, соответствующих импульсам, вырабатываемым распределителем 8 импульсов соответственно наг первом, четвертом, втором и третьем выходах. В течение первого такта по переднему фронту импульса, вырабатываемому распределителем 8 импульсов на первом выходе, осу- ществляется запись текущего состояния опрашиваемого датчика через коммутатор 1 в триггер 2.
В течение второго такта по импульсу, вырабатываемому на четвертом выходе распределителя 8 импульсов, происходит запись информации о новом состоянии датчика, сформированной преобразователем кода 3 на основании информации о предшествующем состоянии датчика, поступающей с блока 5 памяти, и текушего состояния Qs с прямого выхода триггера 2 в регистр 4, а также запись адреса опрашиваемого датчика в блок 13 синхронизации и согласования при формировании преобразователем 3 кода сигнала up, свидетельствующего о действительном наличии сигнала от датчика после его действительного отсутствия.
В третьем такте по импульсу, вырабатываемому на втором выходе распределителя 8 импульсов, осуществляется перезапись информации о новом состоянии датчика из регистра 4 в ячейку блока 5 памяти.
В четвертом такте по импульсу, вырабатываемому на третьем выходе распределителя 8 импульсов, на выходе счетчика 9 устанавливается адрес следующего опрашиваемого датчика.
Преобразователь 3 кода осуществляет преобразование по следующим уравнениям: если , то
Ошат-i...ao Oz;
Й5 из, йр о,
если uk as, то, если amam-i.-.ao(n-1)2, то
а та т...ао amOm-i...00+1205 0:5;
up GS; если OmOm-i...ao (п-1)2, то
а та т-...ао 02; o s Оз;
up as,
где
Oft - текущее состояние датчика;
Ор - сигнал, свидетельствующий о действительном наличии сигнала после его действительного отсутствия;
asOmam-i...Oo-информация о предшествующем состоянии датчика;
OsOmOm-I...OO -ИНфОрмаЦИЯ О НОВОМ СОСТОЯНИИ датчика;
Os, (a s)- определяемое действительное состояние (отсутствие или наличие );
amOm-l...Oo(Om-Om-l...Oo)- ЧИСЛО ПОВТОрОВ СОСТОЯНИЯ (наличия или отсутствия сигнала) датчика; m log2tt - количества двоичных разрядов (количества повторов состояния датчика).
Если в течение второго такта цикла опроса датчика преобразователь 3 кода формирует сигнал Ор и на первом выходе блока 13 синхронизации и согласования отсутствует сигнал готовности (уровень «Лог. 1), на
выходе элемента И 12 вырабатывается импульс, по которому осуществляется запись адреса опрашиваемого датчика в блок 13 синхронизации и согласования, а по его заднему фронту вырабатывается сигнал готовности (уровень «Лог. О) на первом выходе блока 13 синхронизации и согласования. По сигналу «Ввод осуществляется чтение адреса импульсного датчика в ЭВМ из блока 13 синхронизации и согласования, а по его заднему фронту снимается сигнал готов- нести (уровень «Лог. 1).
Если в течение второго такта цикла опроса датчика преобразователь 3 кода формирует сигнал up, а на первом выходе блока 13 синхронизации и согласования установлен сигнал готовности (уровень «Лог. О), т. е. записанный в блок 13 синхронизации и согласования адрес дискретного датчика еще не считан в ЭВМ, импульс записи адреса опрашиваемого датчика на выходе элемента И 12 не формируется, а на выходе элемента И-НЕ 10 вырабатывается уровень «Лог. О, который запрещает прохождение импульсов через логический элемент И 7 от генератора 6 импульсов на тактовый вход распределителя 8 импульсов. Таким образом цикл опроса датчика задерживается во втором такте до снятия сигнала готовности (уровень «Лог. 1) после чтения записанного адреса датчика из блока 13 синхронизации и согласования по сигналу «Ввод. После снятия сигнала готовности на выходе элемента И-НЕ 10 восстанавливается уровень «Лог. 1, разрешающий дальнейшее прохождение импульсов через элемент- И 7 на тактовый вход распределителя 8 импульсов, и на выходе элемента И 12 вырабатывается импульс, по которому осуществляется запись адреса опрашиваемого датчика в блок 13 синхронизации и согласования, а по его заднему фронту вырабатывается сигнал готовности (уровень «Лог. О). Дальнейший опрос датчиков осуществляется аналог 1чным образом.
Применение данного устройства позволяет повысить помехоустойчивость устройства и уменьшить вероятность потери информации от датчиктзв. Повышение помехоустойчивости устройства обусловлено тем, что в устройство введены преобразователь кода и регистр, позволяющие производить математическую обработку сигналов от датчиков и на ее основании судить о действительном наличии или отсутствии сигналов на их выходах. Например, если устройство определяет действител зное отсутствие сигнала () от датчика, действительное наличие сигнала () от этого же датчика устанавливается устройством только после считывания п раз подряд наличия сигнала на его выходе при последовательном опросе всех датчиков. При переходе от действительного отсутствия сигнала к действительному наличию сигнала от датчика (ар)
5
0
5
0
5
0
0
устройство вырабатывает сигнал готовности в ЭВМ.
Уменьшение вероятности потери информации от датчиков обусловлено тем, что в устройство введены элементы И-НЕ, два элемента И и элемент НЕ, позволяющие создать один элемент очереди без дополнительных аппаратных затрат, т. е. прл определении устройством перехода от действительного отсутствия сигнала к действительному наличию сигнала от датчика работа устройства не задерживается. Работа устройство задерживается только при переходе от действительного отсутствия сигнала к действительному наличию сигнала от другого датчика при не считанном в ЭВМ адресе предыдуш.его датчика, для которого устройство определяет переход от действительного отсутствия сигнала к действительному наличию сигнала.
Формула изобретения
Устройство для сопряжения электронной вычислительной машины с дискретными датчиками, содержащее генератор импульсов, коммутатор, информационные входы которого являются информационными входами устройства, а выход соединен с информационным входом триггера, распределитель импульсов, первый, второй и третий выходы которого соединены соответственно с управляющим входом триггера, входом записи считывания блока памяти и входом счетчика, информационные выходы которого соединены с информационными входами блока синхронизации и согласования и адресными входами коммутатора и блока памяти, информационный выход блока синхронизации и согласования является информационным выходом устройства, отличающееся тем, что, с целью повышения достоверности вводимой информации, устройство содержит преобразователь кода, регистр, первый и второй элементы И, элемент И-НЕ и элемент НЕ, информационные выходы блока памяти соединены с первыми входами преобразователя кода, выход триггера соединен с вторы.м входом преобразователя кода, первые и второй выходы которого соединены соответственно с информа ционными входами регистра и третьими входами второго элемента И и элемента И-НЕ, вторые входы которых и управляющий вход регистра объединены и подключены к четвертому выходу распределителя импульсов, управляющий выход блока синхронизации и согласования соединен с первым входом второго элемента И и входом элемента НЕ и является управляющим выходом устройства, выход второго элемента И соединен с первым управляющим входом блока синхронизации и согласования, второй управляющий вход которого является управляющим входом устройства, выход элемента НЕ соединен
с первым входом элемента И-НЕ, выход которого подключен к первому входу первого элемента И, второй вход которого подключен
к выходу генератора импульсов, выход первого элемента И соединен с входом распределителя импульсов.
fl«-
З тпОт-т-Оо
Готовность Щ: Ввод К ЭВМ
а
ппппппппппппппг
готоЗ- ность
ФивЛ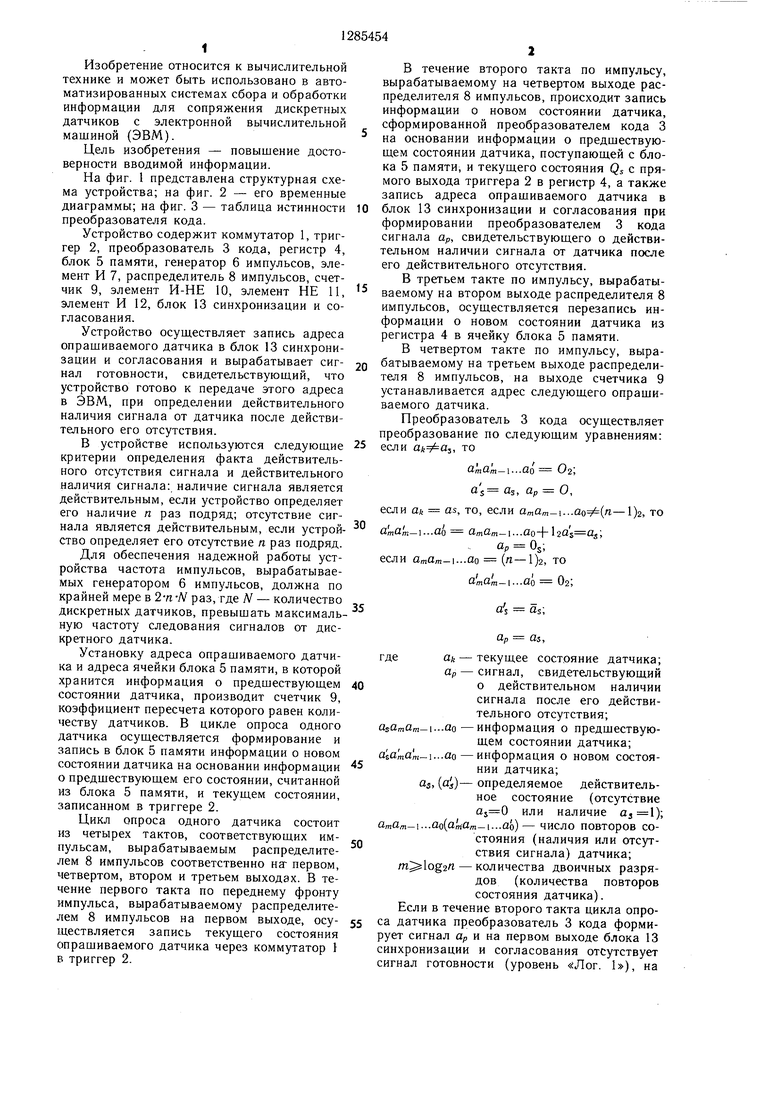

| название | год | авторы | номер документа |
|---|---|---|---|
| Устройство для сопряжения дискретных датчиков с ЭВМ | 1980 |
|
SU983698A1 |
| Многоканальное устройство ввода аналоговой информации | 1987 |
|
SU1418726A1 |
| Формирователь адреса | 1979 |
|
SU801026A1 |
| Устройство для телеконтроля | 1990 |
|
SU1732366A1 |
| Устройство для сбора данных | 1984 |
|
SU1213427A1 |
| Многоканальное устройство для обработки первичной информации | 1984 |
|
SU1234851A1 |
| Устройство для отображения информации на экране телевизионного приемника | 1988 |
|
SU1583967A1 |
| Устройство для ввода информации | 1986 |
|
SU1335971A1 |
| Устройство для управления электропотреблением предприятия | 1984 |
|
SU1246246A1 |
| УСТРОЙСТВО для ТЕЛЕИЗМЕРЕНИЯ | 1972 |
|
SU337799A1 |
Изобретение относится к вычислительной технике и может быть использовано в системах сбора и обработки информации с дискретных датчиков. Цель изобретения - повышение достоверности вводимой информации. Указанная цель достигается за счет введения в состав известного устройства преобразователя кода, регистра и ряда логических элементов с соответствующими связями. В результате этого информация с датчиков принимается достоверной лишь после того, как она подряд считается с датчика п-е количество раз, задаваемое преобразователем кода, а также создается один элемент очереди, что в совокупности исключает влияние помех и уменьшает вероятность потери информации, т. е. повышает достоверность вводимой информации. 3 ил. го оо ел 4 сд N4
| Устройство для ввода информации | 1983 |
|
SU1107115A1 |
| Приспособление для точного наложения листов бумаги при снятии оттисков | 1922 |
|
SU6A1 |
| Устройство для сопряжения электроннойВычиСлиТЕльНОй МАшиНы C диСКРЕТНыМидАТчиКАМи | 1979 |
|
SU830367A1 |
| Приспособление для точного наложения листов бумаги при снятии оттисков | 1922 |
|
SU6A1 |
